

Методичка ЛР_МоСисУп
.pdfs^2 + 10 |
|
+ 100 |
|
|
|
|
|
|
|
|
воитьвести названияпри помощивходампроцедурывыходамset |
||||||
некоторыепрямой После100-------------------------------------------------------------------Tranобратнееs^4ferсимвольные25того,+function:s^2й цепика+ ^3процсистемаописания250дурой0s^2сформирfeedback:. 8000В частностиsва 5 00можно. |
|||||||||||||||||
системы,>> такжеsget(sysnum:,'Notes','УгдатьInputName','Моменткрат250 25кийовое2комментарий.5e+движение03]}сил', 'OutputName','рпеды')самой присУголистемерыскания'). |
|
||||||||||||||||
den: |
|
|
|
|
|
.05e+003 1.06e+004 8e+003 |
5e+003]} |
|
|
||||||||
Ts:1050 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
y:{[0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
ys=feedback(W01,U)el y: |
|
|
|
|
|
анализа |
|||||||||||
InputName:Not s: {'Угловое |
дв жение торп ды'} |
|
|
сущ |
|||||||||||||
Пакет CONTROL |
пред ставляет пакет процедур для |
||||||||||||||||
прежде всего, для |
|
опредположния отклика системы |
внешние |
здействия как |
временнойСАУ, |
||||||||||||
ioDel |
|
{[10y: |
|
|
|
|
|
|
|
|
|
|
|
||||
Variab |
|
|
|
's' |
|
|
|
|
|
|
|
|
|
|
|
|
|
OutputGroup:[1x1struct] |
|
|
|
|
|
||||||||||||
|
|
|
|
з системы |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
{'Мом |
|
|
сил'} |
я'} |
|
|
|
|
|||
Общ |
|
|
|
|
|
|
ыска |
|
|
|
|
||||||
|
|
|
|
анал |
|
я |
|
|
|
|
|
||||||
1.3.1.1. Пр |
|
|
|
|
|
|
за во временн й |
|
|
|
|
||||||
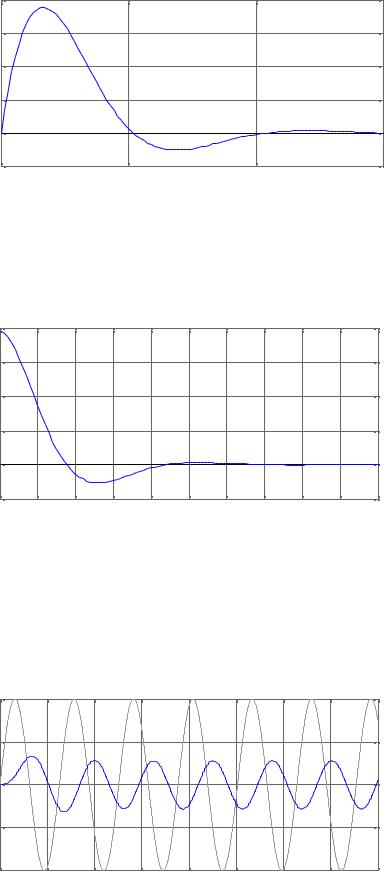
im ulse |
Нахождение |
|
отклика на импульс ое входное воздействествления. |
|
|||||||||||||
UserData: |
[] |
|
|
|
|
|
|
|
|
|
|
некоторых |
|||||
Для Аналобластяхмеры вр менных откликов областистемы на внешние |
|||||||||||||||||
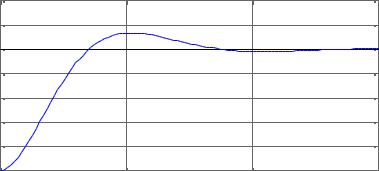
step Нахождение |
реакции |
системы на единаичный скачок входноговоздействия. |
|||||||||||||||
так в частотной |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
видов предусмотрены функци : |
|
|
|
|
|
||||||||||||
казы ающиеmargin. .1.3. расп л жениедуры,иагр ммулюсБ де |
|
казансистемыотдельзапасовые характеристикипо амплитуде и и |
фазеграфичес. |
|||||||||||
ole Расчет |
|
люсов |
истемы. |
|
|
|
|
|
|
|||||
СтроитРасч |
юсов,вычисляющиенулей эффициента передачи системы. |
|
||||||||||||
п люсов zpkdataсистемыzmap . |
|
|
строение |
на |
|
пле |
й плоскости карты |
расположения нулей ки |
||||||
1>>Применяя.3step(sys).2. Примерыпроцедуруана изаstepво временсозданулейксноййобластив п. 2.2 модели, |
|
|
|
|||||||||||
можно получить график |
|
|
|
|
Step Response |
|
|
|
|
|||||
|
7 |
|
|
|
|
|
From: Момент сил To: Угол рыскания |
|
|
|
||||
0.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
5 |
|
|
|
10 |
|
15 |
|
Аналогич о, |
|
|
|
|
|
|
дуры impulse |
|
|
|
||||
>> impulse(sys) |
|
|
|
|
|
|
|
|
|
|
|
|||
приведет к появлениюиспользованиеграфическомпроцкне графика, приведенного ниже: |
|
|
||||||||||||
-0.05 |
|
0 0 1],20) |
|
5 |
|
|
|
10 |
|
|
15 |
||||
>> initial(sssys,[0sssys= 0(sys) |
|
|
|
|
|
|
|||||||||
Получим |
4 |
|
|
|
|
Response to Initial Conditions |
|
|
|
|
|||||
|
0.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
0 |
2 |
4 |
6 |
|
8 |
10 |
12 |
|
14 |
16 |
18 |
20 |
|
векторзначенийuДлязначенийвремени,применениявходнойкоторыхпроцевеличиныбу рыт заданыв казаннеобходимоыеачениямоментывходногопредварвременивоздействия,т льно задатьзатемвекторзадатьt |
|||||||||||||||
>> t=0:0.01:40; u=sin(t); lsim(sssys,u,t);grid |
|
|
|
|
|
|
|||||||||
Результат представлен на следующей фигуре: |
|
|
|
|
|
|
|||||||||
|
|
1 |
|
|
|
|
Linear Simulation Results |
|
|
|
|
|
|||
- |
0.05 |
0 |
5 |
10 |
|
|
15 |
20 |
25 |
|
|
30 |
35 |
40 |
|
|
-1 |
|
|
|
|
||||||||||
|
|
42 |
|
|
|
|
|
|
|
|
|
|
|
|
Magnitude(dB) |
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Phase(deg) |
- |
-9 |
-2 |
|
10-1 |
|
|
100 |
|
|
|
101 |
|
102 |
|
|
|
|
|
|
|
|
|
||||||
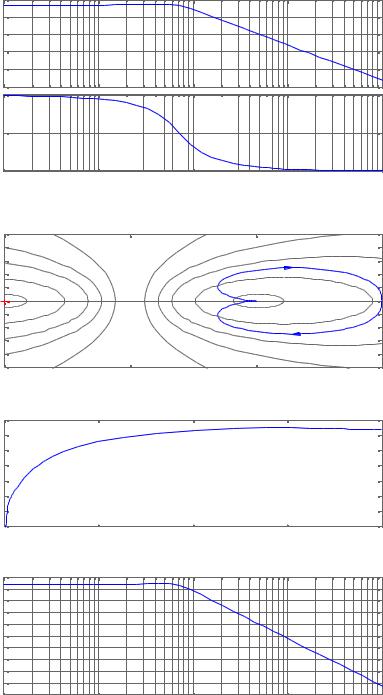
yquist(sys) |
|
|
|
Frequency (rad/sec) |
|
|
|
|
|
|||||
|
|
180.6 |
|
|
|
|
|
Nyquist Diagram |
|
|
|
|
|
|
|
|
4 |
2 dB |
|
From: Момент сил To: Угол рысканèÿ |
|
-4 |
|
||||||
|
|
|
0 dB |
-2 dB |
|
|
-10 dB |
|
||||||
|
|
6 dB |
|
|
|
|
|
|
|
-6 dB |
|
|||
|
|
4 |
1 |
|
|
|
|
|
-20 dB |
|
|
|
||
ImaginaryAxis |
|
2 |
20 dB |
|
|
|
|
|
|
|
|
|||
- 10 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-1 |
|
|
|
-0.5 |
|
Real Axis |
|
0 |
|
|
|
0.5 |
nichols(sys)-1 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
Nichols Chart |
|
|
|
|
|
|
|
|
10 |
|
|
|
From: Момент сил To: Угол рыскания |
|
|
|
|||||
|
|
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
LoopGain(dB)Open- |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
-135 |
|
|
-90 |
|
|
|
-45 |
|
0 |
|
|
-180 |
|
|
|
|
|
|
|
|||||
sigma(sys) |
|
|
Open-Loop Ph se (deg) |
|
|
|
|
|
||||||
|
|
|
|
Singular Values |
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
SingularValues(dB) |
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
-100 |
|
|
10-1 |
|
|
100 |
|
|
|
101 |
|
102 |
|
|
|
10-2 |
|
|
|
|
|
|
|
|||||
>> margin(sys);grid |
|
|
|
Frequency (rad/sec) |
|
|
|
|
|
|
||||

Magnitude(dB) |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Phase(deg) |
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
35 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
-180 |
2 |
|
|
|
10 |
1 |
100 |
|
101 |
|
|
102 |
|||
|
|
|
10 |
|
|
|
|
|
|
||||||||
anspole(sys) |
|
|
|
|
|
|
|
Frequency (rad/sec) |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
"Угол рыскания": |
|
|
|
||||||
(s^2sysz=zpk(+ .25 (s^2fromys)+ +.5128)10sinput+"Момент100)(s^2 + 9.сил"731sto+ output97.5) |
|
|
|
||||||||||||||
z [z,p,k]=zpkdata(sysz,'v') |
|
|
|
|
|
|
|
|
|
||||||||
Zero/pole/gain5 0000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
------------------------------------------------04.38478653 7693s+0808..5924i040603i |
|
|
|
|
|
|
|
||||||||||
k = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.2500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
>> pzmap(sys); grid |
|
|
|
|
|
|
|
|
|
|
|
||||||
Результат представлен на рисунке ниже |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
0.4 |
|
|
|
Pole-Zero Map |
0.14 |
0.09 |
0.04 |
8 |
|
|
|
|
|
8 |
|
56 |
|
|
|
|
0.28 |
0.2 |
|
|||||
ImaginaryAxis |
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|||
|
-246 |
0.8 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
|
|
|
-108 |
|
|
|
|
|
|
|
|
|
|
4 |
|
||
|
|
|
|
56 |
|
0.4 |
|
|
|
0.28 |
0.2 |
0.14 |
0.09 |
0.04 |
6 |
|
|
|
|
|
|
-4.5 |
-4 |
|
-3.5 |
8 |
0 |
||||||||
|
|
|
-5 |
|
|
|
|
-3 -2.5 |
-2 |
-1.5 |
-1 |
-0.5 |
|
||||
|
Задание |
|
самостоят ль |
Real Axis |
|
|
|
|
|
|
|||||||
|
|
ую работу |
|
|
|
|
|
|
|||||||||
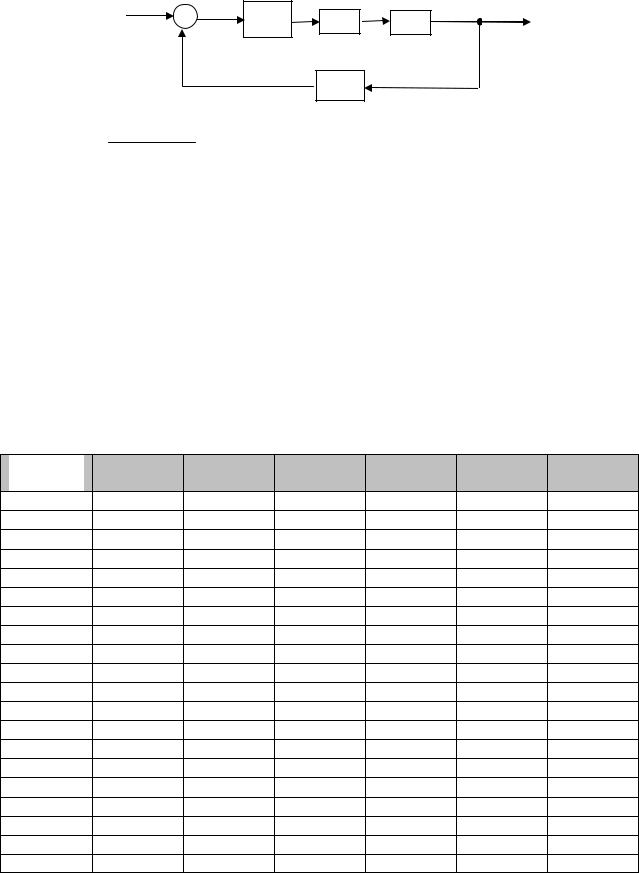
1.4.1. Структурная схема |
|
|
|
|
|
|
|
|
|||||||||
Создать модель системы слмоделижения, представленной на рисунке: |
|
|
|||||||||||||||
|
|
-- 1 |
дел |
2 |
|
реакциюлю |
систенули2к |
34на г . |
; 3 |
в |
|
|
|
|
|
|
||||||||
|
|
|
|
|
пр |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П едст ить |
|
|
|
рафи . |
|
|
уст йч во ть системы показатели |
|||||||||||||||
|
|
Копрценитьрием |
при |
ис ледованики до жны |
|
ва |
|
|||||||||||||||||
к чества.В случ |
|
неудсоответствующительног к |
|
|
|
здействия;при х дных параметрах (см. |
||||||||||||||||||
т бл цу вариантов) |
|
|
брвлетвоь |
ебуемые пара |
служитьры системыкорр ктирующего фильтра W1(s) T1, T2, |
|||||||||||||||||||
Kпр. |
1.4.3. Исходнвременнпараметрыые |
модел |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Исходные параметры заданнойсистемырмоничесы для каждогокие варианта заданы втаблице: |
||||||||||||||||||||||
варианта№ |
|
|
T1, c |
|
|
T2, c |
|
|
T3, c |
|
|
|
T4, c |
|
5 |
Kпр |
|
|
Kос |
|||||
6543 |
|
|
|
4032 |
|
|
|
|
4320 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
9 |
1 |
|
|
11 |
|
|
|
|
8 |
|
|
30 |
|
|
|
|
10.0 |
|
|
|
||||
|
|
|
|
|
|
|
95 |
|
|
|
0.0045 |
9 |
|
|
1.0 |
|
||||||||
20 |
|
0.700 |
|
|
|
|
0.065 |
0.050 |
|
|
8.0 |
|
|
|||||||||||
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
8 |
8 |
|
1 |
6 |
|
|
|
|
|
100 |
|
6 |
|
|
|
50 |
7 |
|
|
2 |
|
|
||
|
4 |
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
5 |
|
|
5 |
|
|
|
|
|
|
|
|
40 |
|
|
|
25 |
|
|
|
|
|
||
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
||||
|
6 |
|
|
80 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
||
19 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
полезной |
|
|
|
|
другой физической ве ичине, содержащейся |
измере ном |
|||||||||||||||
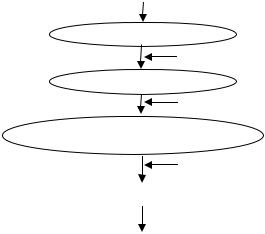
целях полученияОбщая информациисхема образования змеряемогочине, которая до жна бытьпроцессаизмерена,его преобразовапредставленаия |
|||||||||||||||||||||
р сунке. |
|
|
|
|
|
Измеряемая |
Полезный сигнала |
|
|
|
|
||||||||||
|
|
|
|
|
|
П рв чныйИзме итель |
Шумизмерителя |
|
|
||||||||||||
|
|
|
|
|
|
Измеренная |
тный |
|
еобразователь |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
Дис |
|
|
|
|
|
||||||||
|
|
|
|
|
|
Массив измеренийОбработанная инф |
|
мация |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
на |
|
ке служит для |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
ор |
ния входного дискретного во времени |
|||||||||||||
сигнала выходн й |
|
нимизаци |
искажений, |
|
|
|
|
|
шумами. |
аналоговых |
|||||||||||
Пакет MatLab Signal Processing Toolboxпреобраз зволяет: |
|
цифровых |
|||||||||||||||||||
|
рассчитывать конкретныевеличинасловые хар |
ктеристики |
|||||||||||||||||||
льтров |
по |
|
|
|
АФЧХ; |
|
льности. Форм |
|
|
|
ие |
|
ных процессов |
||||||||
нале. |
|
О |
|
средства |
|
|
|
|
|
|
|||||||||||
|
|
требуемымОбщиеосновы линейной фильтрациповых |
|
прим ре линейного стационарного |
|||||||||||||||||
Фильтрация – |
это |
реобразов ние заданного сиг аласлучайпомощью линейного фильтра. |
|||||||||||||||||||
фильтраРассмотрвт рого порядка, |
передаточнфильтраця функцияктированныхкот ого имеет вид: |
|
|||||||||||||||||||
|
ф |
|
|
|
|
|
|
|
(э страп лят |
+ АЦП) |
еменных сиг алов; |
|
|||||||||
|
ми овать п след ват |
|
|
|
|
|
|
|
|
||||||||||||
- обра атыватьисунх при помощи спрое |
|
Шум дискретизации |
|
||||||||||||||||||
|
|
|
|
|
фи ьтров. |
|
|||||||||||||||
2.2.1. |
|
|
|
|
|
|
|
|
|
льтраци |
|
|
|
|
|
|
|
|
|||
частотная характ |
еристика |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
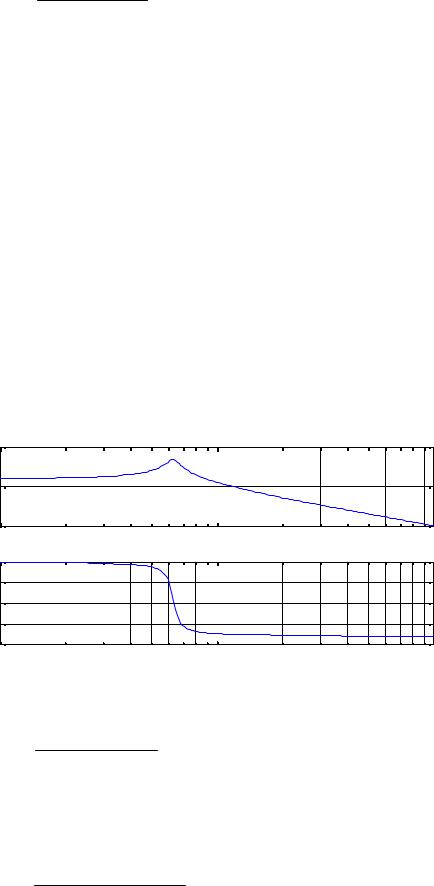
Пример. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
числителя |
|
знаменателя и выведем графики |
|||||||||
|
|
ВычислиA=1; ξ=0м.05;значения2π /коэффициентовω =1. |
|
||||||||||||||||||||||||||||||||
АЧХ и ФЧХ: |
|
|
|
|
|
|
|
|
.05; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
T0=1;dz=0a1(A=om0=2*)= pi/T(2)0;a=12*dz*om0;a1(3)=om0^2;b1(1)=A; |
|
|
|
|
||||||||||||||||||||||||||||
|
|
>> freqs(b1,a1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
10 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
101 |
|
|
|
|
|
102 |
|||
|
|
|
|
|
|
|
|
-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
- |
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
-0050 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Frequency (rad/s) |
|
|
|
|
|||||||
|
|
|
|
|
2 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
101 |
|
|
|
|
|
102 |
|
|
|
Дискр |
|
|
ная |
передаточная |
|
ф |
|
|
|
Frequency (rad/s) |
|
непрерыв |
му |
фильтру (1) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
соотв тствующая |
||||||||||||||||||||||||||
(которая |
мож |
|
т |
|
|
быть получена путем Z - пр образования |
разностного |
уравнения - |
|||||||||||||||||||||||||||
дискретного аналога дифференци |
|
|
льного |
урав |
ения), |
меет вид: |
|
|
|
||||||||||||||||||||||||||
|
|
|
( z ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
кция, |
|
|
|
(2) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
ATs |
a |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
2 z 2 |
|
|
|
|
|
|
|
|
||||||||||
где a |
|
|
|
(ω0 |
|
|
|
|
(ω0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
0 |
- |
|
|
|
|
|
|
Ts) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
(1+ξ |
|
|
|
10 Ts)); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a =1+2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2 |
В |
общем случае дискретная передаточная функция имеет вид: |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
y |
|
|
|
b |
0 |
|
b |
|
z 1 |
|
... b |
m |
z m |
|
|
|
|
|
|
|
||||||||
|
|
G( z ) |
(ωTs)+z |
|
|
|
|
1 |
|
|
|
|
|
|
|
n |
|
|
(3) |
|
|
|
|||||||||||||
|
|
|
x |
|
|
a0 |
a1 z 1 |
|
. an |
|
|
|
|
|
|||||||||||||||||||||
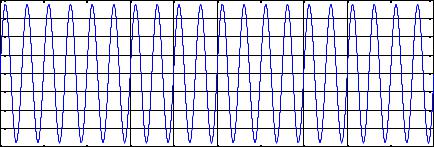
|
A1 |
75; |
|
(2*pi*t/T1); |
|
|
|
|
|
|
|
|
|
|
|
|
Yp |
A1*si |
|
|
|
|
|
|
|
|
|
|
|||
|
|
'P-signal') |
|
|
|
|
|
|
|
|
|
|
|||
|
y |
|
|
T1=1; |
|
|
P-signal |
|
|
|
|
|
|
|
|
|
t,Yp),grid; |
|
|
|
|
|
|
|
|
|
|||||
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Yp |
- 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
|
|
|
|
|
|
|
|
|
|
t, c |
|
|
|
|
|
A2измерения=10; |
к |
полезному-Пустьбсигналуо ыйеевслевысокгауссовдобавилисьчастотнаяиекийпрохшумшумы:ожденсизмеритнусоя чдалярезс периодомспреинтенсивностьюбразователь=0.2 cAшиивамплитудой=5результате. |
|||||||||||||||
В |
результате создается такой измеренный сигнал x(t): |
|
|
|
|
|
|||||||||
|
T2=0.2;A2=10; eps=pi/4; |
|
|
|
|
|
ndn(1,length(t)); |
|
|
||||||
|
Ash=5; |
grid |
|
|
|
|
|
|
|
||||||
|
p ot |
|
|
|
|
|
|
|
|
|
|
|
|||
|
title |
'inpu |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xl=A1*sin(2*pi*t/T1)+A2*sin(2*pi*t/T2+eps)+Ash*rat,x), c' |
|
|
|
|
||||||||||
>> ylabel('x(t)') |
|
|
|
|
|
|
|
|
|
|
|||||