

Задание на курсовой
проект по дисциплине
«Автоматизация
систем электроснабжения» на тему Студент
Архипов Н.Г. группа ЭС-306
Количество
контролируемых пунктов КП: 15
Количество
двухпозиционных объектов на КП: 6 Количество
циклов при передаче приказа: 2
В
элементе с избирающим признаком
содержится коротких: 9 Номер
рассматриваемого приказа: 90
Моделирующий
пакет: MatLab Направление
информационных потоков на функциональных
схемах: слева-направо
Особенности
применения ГОСТ 2.743-91: пакетный метод
сжатия информации.
2.1.
Функциональные схемы ТУ-ДП и ТУ-КП. 2.2.
Временные диаграммы работы функциональных
узлов ТУ-ДП и ТУ-КП. 2.3.
Машинограммы (распечатки) результатов
моделирования в заданном пакете. 2.4.
Пояснительная записка в составе:
задание; введение; схема телемеханизации
дистанции электроснабжения и расчет
емкости системы телемеханики; выбор
способа кодирования и проектирование
импульсной серии и кодовой таблицы
команд ТУ; описание работы, блоков ТУ-ДП
и ТУ-КП при формировании и исполнении
заданного номера приказа; описание
модели системы; заключение. 2.5.
Файл с моделью системы телемеханики
заданной среды моделирования 2.6.
Файл с презентацией проекта
1.
Усатенко С.Т. Каченюк Т.К., Терехова М.В.
Выполнение электрических схем по ЕСКД:
Справочник.–М.:Изд-во стандартов,
1989.–325 с. 2.
Александров К.К., Кузьмина Е.Г.
Электротехнические чертежи и
схемы.–М.:Энергоатомиздат, 1990.–288 с. 3.
ГОСТ 2.743-91. Обозначения условные
графические в схемах. Элементы цифровой
техники. 4.
ГОСТ 2.751-73* Обозначения условные
графические в схемах. Электрические
связи, провода, кабели и шины. 5.
ГОСТ 2.752-71* Обозначения условные
графические в схемах. Устройства
телемеханики. 4.
Срок сдачи проекта 29
декабря 2006 г . Задание
выдал: доц. А.И. Бурьяноватый Задание
получил:Построение и анализ функциональных схем комплекса устройств телеуправления
Исходные данные
2. Содержание проекта
3. Перечень рекомендуемых источников
Р
МОДЕЛЬ
СИСТЕМЫ ТЕЛЕУПРАВЛЕНИЯ ЛИСНА-Ч. БУРЬЯНОВАТЫЙ
А.И. 2-4 ДЕКАБРЯ 2005 ГОДА КУРСОВОЙ
ПРОЕКТ ПО АСЭ.
ТАБЛИЦЫ
КОДИРОВАНИЯ
==================== КОНТРОЛИРУЕМЫЕ
ПУНКТЫ КОДИРОВАНИЕ НОМЕРА
ИМПУЛЬСОВ ------------------------------------------------------------------- BBOD-1_110
KB 1_Й_ОБЪЕКТ = 1 ОБ 1 ГР 8 - 12 BBOD-2_110
KB 2_Й_ОБЪЕКТ = 2 ОБ 1 ГР 9 - 12 T1
3_Й_ОБЪЕКТ = 3 ОБ 1 ГР 10 -
12 T2
4_Й_ОБЪЕКТ = 4 ОБ 1 ГР 11 -
12 TCH-1
5_Й_ОБЪЕКТ = 1 ОБ 2 ГР 8 - 13 TCH-2
6_Й_ОБЪЕКТ = 2 ОБ 2 ГР 9 - 13 FIDER-1_10
KV 7_Й_ОБЪЕКТ = 3 ОБ 2 ГР 10 - 13 FIDER-2_10
KV 8_Й_ОБЪЕКТ = 4 ОБ 2 ГР 11 - 13 FIDER-1_SCB
9_Й_ОБЪЕКТ = 1 ОБ 3 ГР 8 - 14 FIDER-2_SCB
10_Й_ОБЪЕКТ =2 ОБ 3 ГР 9 - 14 F-1_3.3
KV 11_Й_ОБЪЕКТ =3 ОБ 3 ГР 10 - 14 F-2_3.3
KV 12_Й_ОБЪЕКТ =4 ОБ 3 ГР 11 - 14 ОБЪЕКТЫ
КП КОДИРОВАНИЕ НОМЕРА
ИМПУЛЬСОВ ------------------------------------------------------------------ HЕТ
OPERACIJ - - PETROVSK
1_Й КП 2 - 3 ROSTOV
2_Й_КП 2 - 4 KOROMYSLOVO
3_Й_КП 2 - 5 JAROSLAVL
4_Й_КП 3 - 4 UTKINO
5_Й_КП 3 - 5 PUTJATINO
6_Й_КП 4 - 5 ХАРАКТЕР
ОПЕРАЦИИ КОДИРОВАНИЕ НОМЕР
ИМПУЛЬСОВ -------------------------------------------------------------------- VKL_KP
ВКЛЮЧИТЬ НА КА 6 OTK_KP
ОТКЛЮЧИТЬ НА КП 7
ОПИСАНИЕ
ТЕСТОВОГО ПРИМЕРА
========================== СХЕМА
ВЫПОЛНЕНА НА 16 ПОЗИЦИЯХ РАСПРЕДЕЛИТЕЛЯ
(4 ДВОИЧНЫХ РАЗРЯДА) СВЕРХДЛИННЫЙ
ФАЗИРУЮЩИЙ НА ДВУХ ПОЗИЦИЯХ РАСПРЕДЕЛИТЕЛЯ ПЕРВЫЙ
ИМПУЛЬС ИСПОЛЬЗУЕТСЯ ДЛЯ НАЧАЛА ПЕРЕДАЧИ ВСЕГО
ВОЗМОЖНО УПРАВЛЕНИ ШЕСТЬЮ КОНТРОЛИРУЕМЫМИ
ПУНКТАМИ НА
КАЖДОМ ПУНКТЕ ПО 12 ОБЪЕКТОВ, КАЖДЫЙ ИЗ
КОТОРЫХ МОЖЕТ БЫТЬ
ВКЛЮЧЕН ИЛИ ОТКЛЮЧЕН ПО ТЕЛЕУПРАВЛЕНИЮ. В
ГЛАВНОМ ОКНЕ МОДЕЛИ shema_TU ПРЕДСТАВЛЕНЫ
МОДЕЛИ: -
ДИСПЕТЧЕРСКИЙ ПУНКТ TU-DP -
ДВА УЧАСТКА КАНАЛА СВЯЗИ, В КОТОРЫХ
ВОЗМОЖНЫ ПОМЕХИ -
ДВА КОНТРОЛИРУЕМЫХ ПУНКТА TU-KP -
СРЕДСТВА НАБЛЮДЕНИЯ СИГНАЛОВ КЛЮЧИ
ВЫБОРА КП, ХО И ОБЪЕКТОВ В ДИСПЕТЧЕРСКОМ
КОМПЛЕКТЕ ТУ-ДП ВЫПОЛНЕНЫ
НА УПРАВЛЯЕМЫХ ПЕРЕКЛЮЧАТЕЛЯХ ИХ
СОСТОЯНИЕ ЗАДАЕТСЯ ПРИ ВХОДЕ В
МАСКИРОВАННЫЙ БЛОК TU-DP ОСЦИЛЛОГРАФЫ
НА ТЕСТОВОМ ПРИМЕРЕ НАСТРОЕНЫ НА
КОНТРОЛЬ ПРИКАЗА
<ОТКЛЮЧИТЬ
НА ПОДСТАНЦИИ PETROVSK BBOD-1_110 KB > ПРИ
УСПЕШНОЙ ПЕРЕДАЧЕ КОМАНДЫ ТУ УДЛИНЯЮТСЯ:
1, 2, 3, 7, 8, 12, 15, 16 ИМПУЛЬСЫ В КАЖДОЙ РАБОЧЕЙ
СЕРИИ. ПРИ
МОДЕЛИРОВАНИИ ОДИНОЧНОЙ ПОМЕХИ В КАНАЛЕ
СВЯЗИ СИНХРОНИЗАЦИЯ ВОССТАНАВЛИВАЕТСЯ
ТОЛЬКО НА СВЕРХДЛИННОМ ФАЗИРУЮЩЕМ
ИМПУЛЬСЕ ПЕРВОЙ РАБОЧЕЙ СЕРИИ. ТАКОЙ
ПРИКАЗ НЕ ИСПОЛНЯЕТСЯ. ПРИ
МНОЖЕСТВЕННЫХ ПОМЕХАХ В КАНАЛЕ СВЯЗИ
ПРИКАЗ ПЕРЕДАТЬ НЕ УДАЕТСЯ.
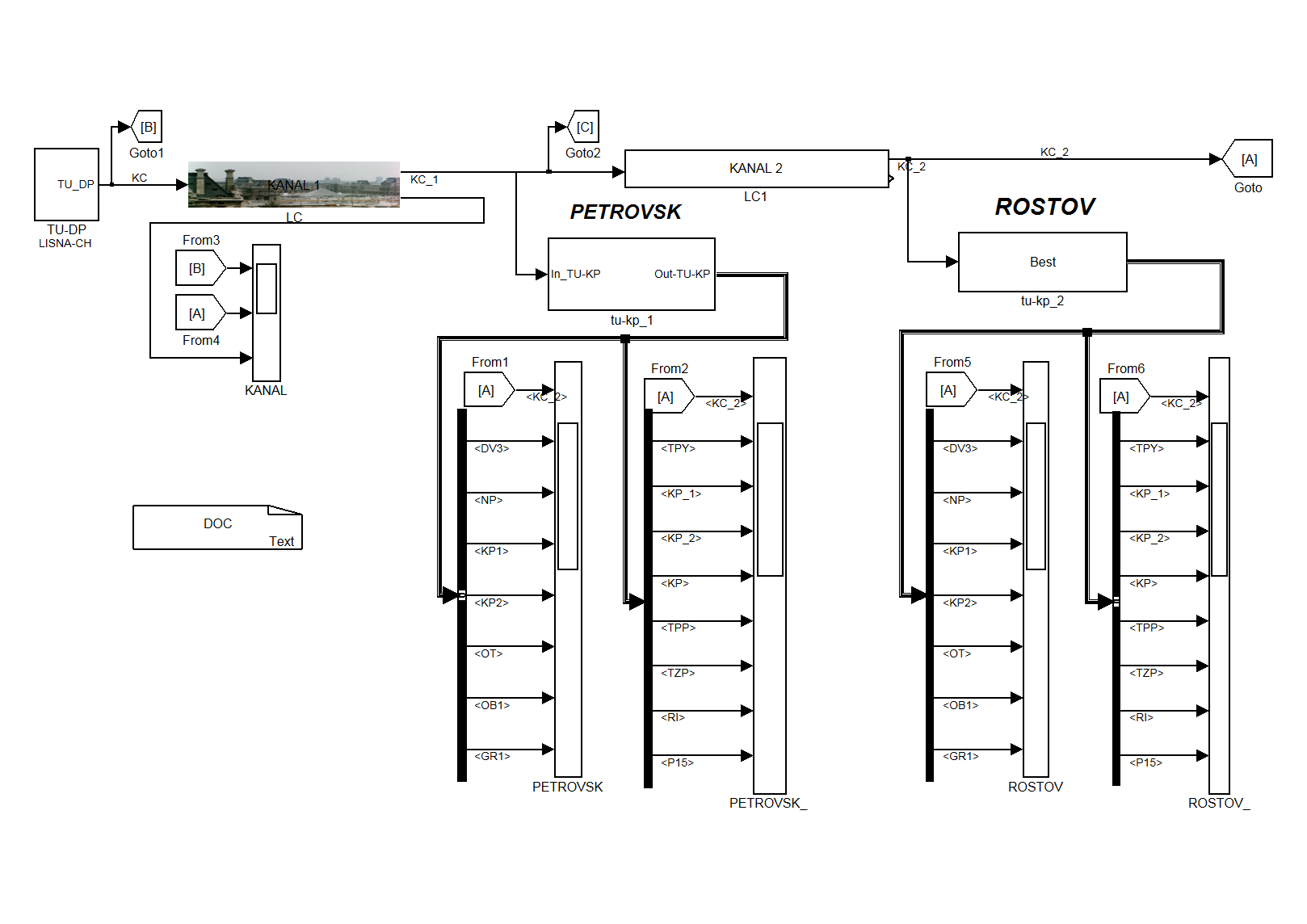
Рис. 28. Общий вид модели системы телеуправления