

Регистр принятых команд rg
Назначение данного регистра моделировать прием команды полукомплектом контролируемого пункта. На рис. 23. приведен пример построения такого регистра.
Рис.23. Пример модели регистра
принятых
команд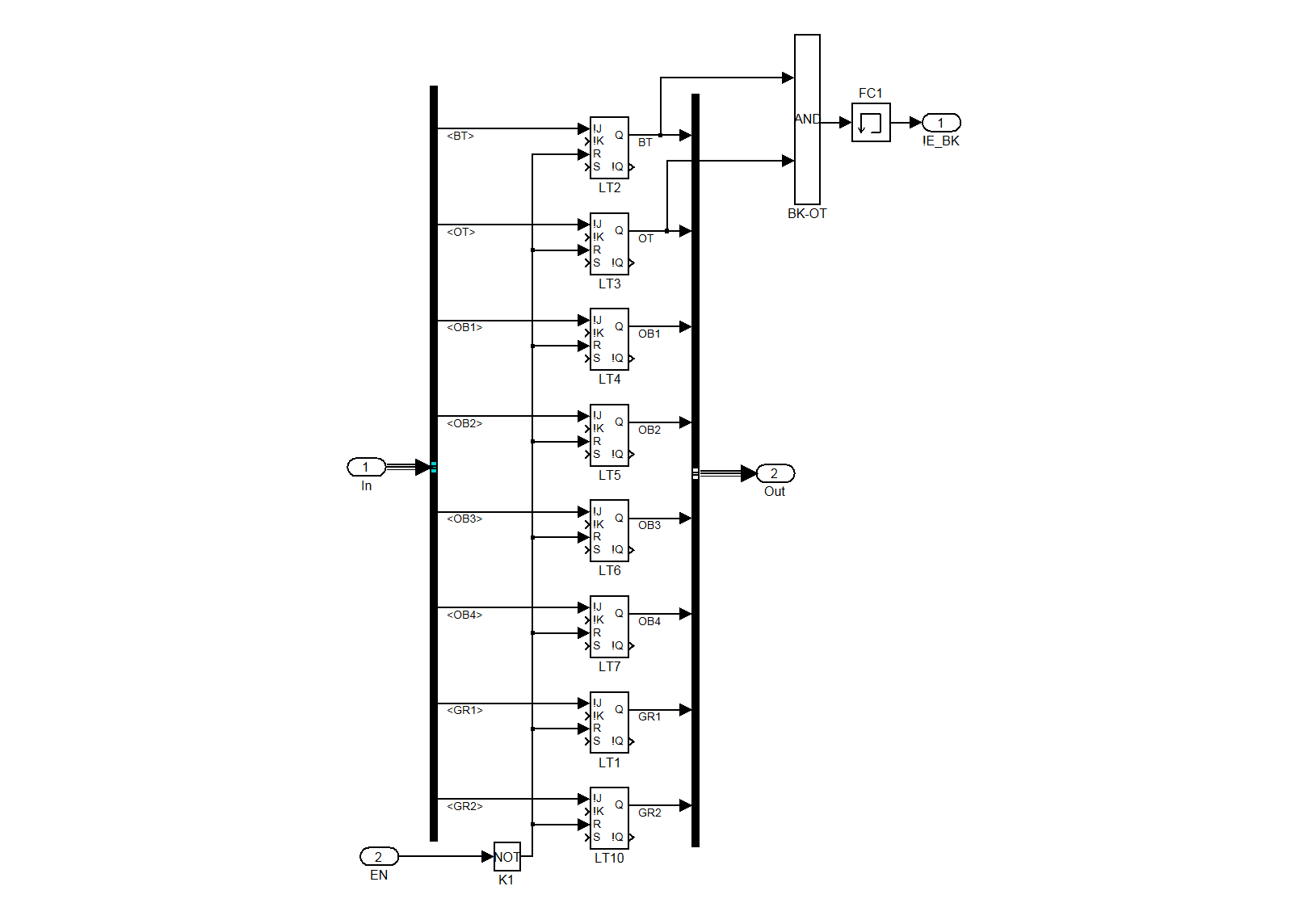
Устройство декодирования приказа
Устройство представляет собой дешифратор, работа которого разрешается при получении сигнала от реле исполненияRI. Пример схемы модели дешифратора приведен на рис.24.
Схема приемного полукомплекта
Схема модели приемного полукомплекта дана на рис. 25.
При поступлении длинного импульса из линии связи подается разрешение на открытие выходов счетчика распределителя. Таким образом, единицы на выходах счетчика-распределителя появляются только в тех позициях, в которых из линии связи приходит длинный элемент.
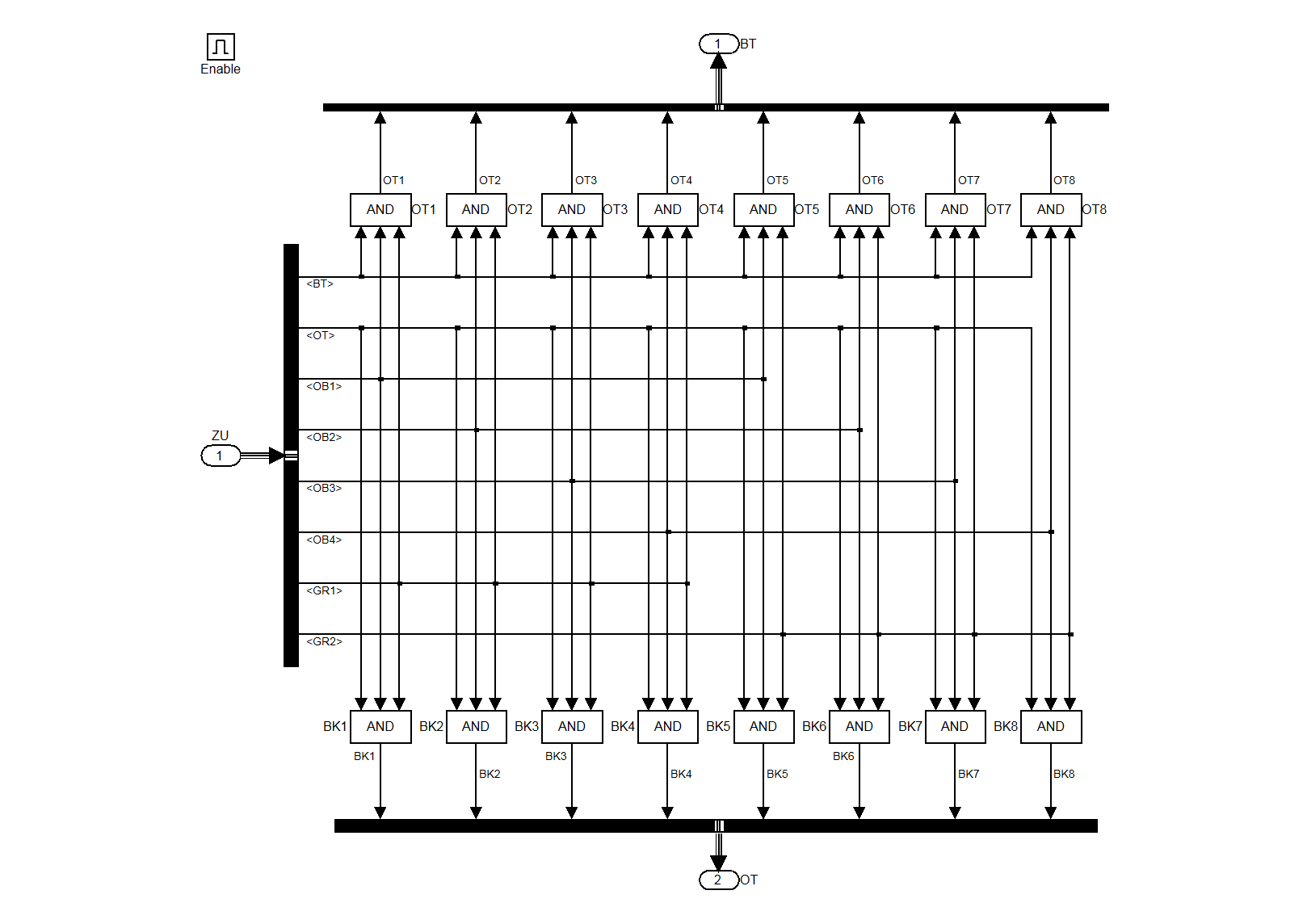
Рис. 24. Устройство декодирования приказа DC
Триггер задержки движения TZD(см. рис. 25) обеспечивает контроль и обеспечивает синфазность хода распределителей на передающей и приемной сторонах. При переходе в 15-ю позициюTZDвозбуждается, при синфазной работе в это время в линии связи сверхдлинный фазирующий импульс. Поэтому датчик времени успевает переключиться в 7-ю позицию и сбрасываетTZD, что приводит к переключению счетчика-распределителя в 16-ю позицию.
Блок управления приемом приказа состоит из триггера повторного приема TPPи ключа управления регистром приема командK_RGи реле исполненияRI. Триггер ТPPобеспечивает выдачу разрешения на хранения результатов приема первой импульсной серии приказа и разрешает работу реле исполненияRIв конце второй импульсной серии. Реле исполнения при получении сигнала на срабатывания переходит в возбужденное состояние на время, достаточное для отработки команду исполнительными устройствами (5-10 с). Возбужденное состояние реле исполнения обеспечивает сохранность информации в регистре принятых команд и разрешает работу декодирующего устройстваDC. По истечении установленной выдержки времени реле исполнения переходит в исходное состояние, регистр принятых команд и декодирующее устройство сбрасываются в невозбужденные состояния.
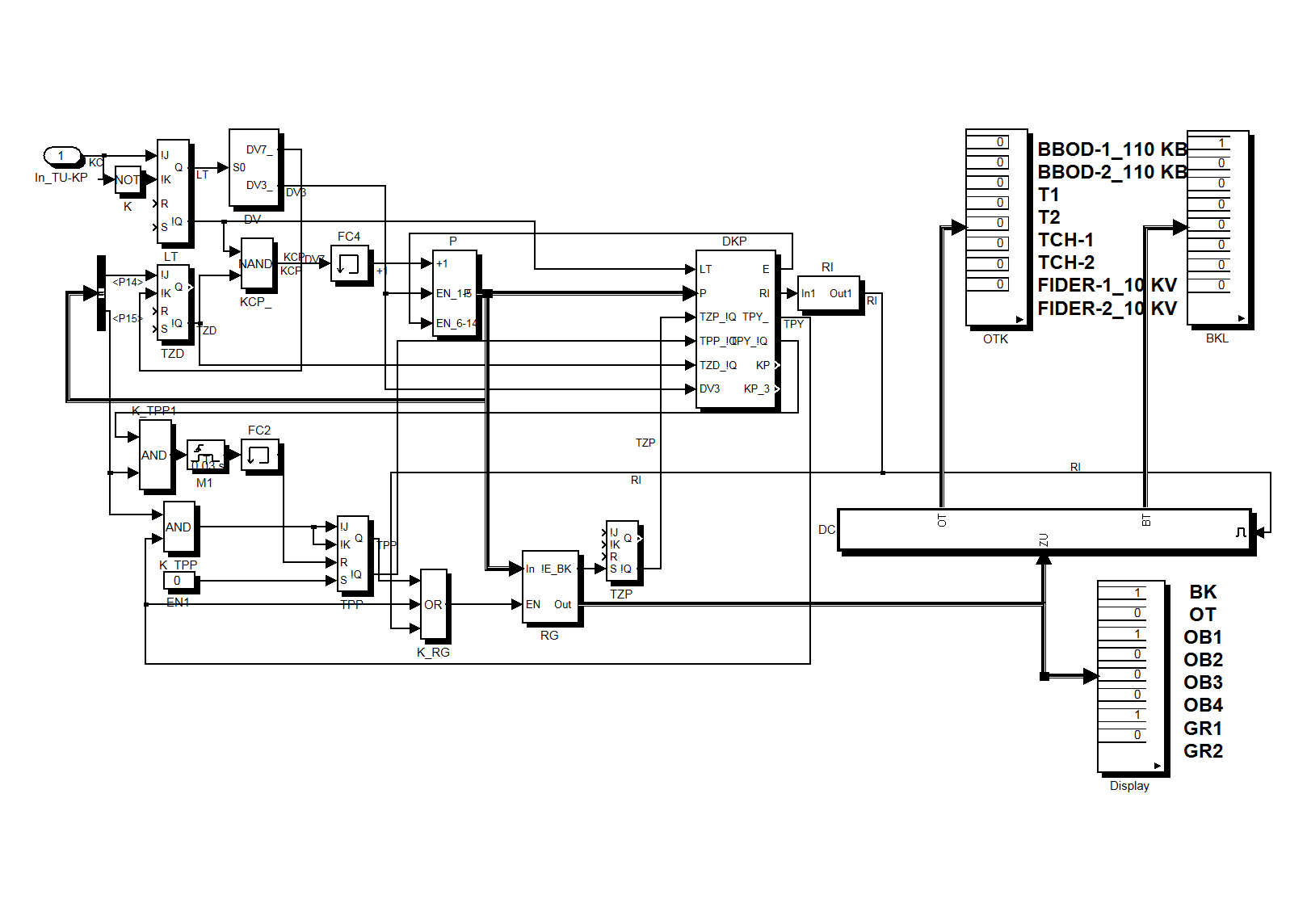
Рис.25. Модель приемного полукомплекта
3.3. Порядок выполнения курсового проекта
Задание на курсовой проект формируется преподавателем из базы данных и имеет вид, показанный на рис. 26.
По этому заданию в первой части проекта необходимо спроектировать таблицу кодирования и импульсную серию, обеспечивающую управление указанным количеством контролируемых пунктов и объектов на них. Затем на бумаге разрабатываются функциональные схемы приемного и передающего полукомплектов и строятся временные диаграммы, с целью проверки работоспособности проектируемого устройства. Исполнение функциональных схем должно производиться с учетом заданных особенностей применения ГОСТа на условные графические обозначения.
Во второй части проекта требуется смоделировать работу проектируемой системы телемеханики средствами пакета MATLAB-Simulink. Предварительно потребуется освоить моделирование дискретных устройств. С этой целью необходимо выполнить практические задания, описание которых было дано во второй части данных указаний. Затем необходимо выполнить компьютерную модель проектируемой системы. В пояснительную записку модель включается в виде схем и временных диаграмм, получаемых на осциллографах модели. Кроме того, готовится файл в средеMATLAB-Simulinlkcдокументацией на модель. Пример содержание этого документа приведен на рис. 27. При разработке модели следует широко применять блоки и маскированные блоки. В наиболее общем виде модель системы телеуправления может выглядеть примерно так, как показано на рис.28. На этом рисунке приведены модель передающего устройства, две модели каналов связи, в которых возможно появление помех, и две модели контролируемых пунктов. Модель снабжена средствами индикации, позволяющими контролировать правильность работы ее элементов.
Третья часть проекта представляет собой презентацию выполненной работы. Презентация должна быть подготовлена с использованием MSPowerPoint. Защита проекта производится публично с использованием слайдов презентации.
Рис. 26. Вид бланка с заданием на проектирование системы телемеханики