

DPS_raschtraek
.pdfPп mg / K . |
(3.8) |
Потребные тяги рассчитываются для различных высот и скоростей полета и нескольких значений полетной массы самолета от минимальной до максимальной. Располагаемые тяги определяются так же в функции скорости для тех же высот, что и потребные тяги. Затем строится диаграмма потребных и располагаемых тяг.
Минимальная Vmin и наивыгоднейшая Vнв скорости установивше-
гося горизонтального полета на небольших и средних высотах определяются из условия равенства подъемной силы и силы тяжести, т.е. из второго равенства (3.3):
Vmin |
|
|
|
2mg |
|
|
|
, |
(3.9) |
|
|
|
|
|
|
||||||
SC ya max |
||||||||||
|
|
|
|
|
||||||
Vнв |
|
|
2mg |
|
. |
|
|
(3.10) |
||
|
|
|
|
|
||||||
|
|
SC yaнв |
|
|
||||||
|
|
|
|
|
|
|
|
|
||
C ya
C ya max
2 |
1 |
Рп |
|
C yaнв
1
2
Pп min
0 Cxa0 |
Сxa |
0 Vmin |
Vнв |
V |
Рис. 3.2. Максимальный и наивыгоднейший |
Рис.3.3. Минимальная и наивыгодней- |
|||
коэффициенты аэродинамической подъем- |
|
шая скорости |
|
|
|
ной силы |
|
|
|
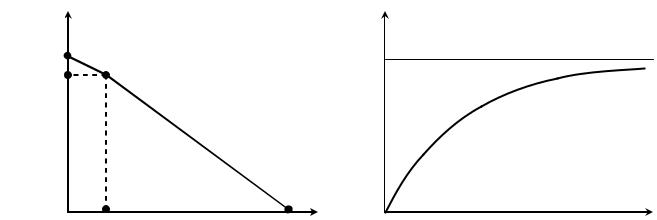
На рис. 3.2 и 3.3 показаны две характерные точки на докритической поляре и на кривой потребной тяги, соответствующие минимальной (точка 1) и наивыгоднейшей (точка 2) скоростям полета. Отметим, что при наивыгоднейшей скорости полета потребная тяга имеет минимальное значение Pп min (рис. 3.3).
21
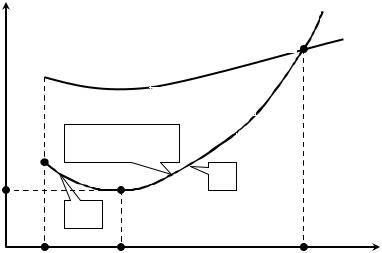
3.2. Характерные области и режимы полета на диаграмме потребных и располагаемых тяг
Типичная диаграмма потребных и располагаемых тяг для небольших и средних высот полета дозвукового самолета приведена на рис. 3.4.
Р |
|
|
|
|
C |
|
|
Рр |
|
||
|
|
|
|
||
|
|
|
набор высоты |
|
|
|
А |
|
|
|
|
|
горизонтальный |
Рп |
|||
|
|
||||
|
|
полет |
|||
|
|
|
|
||
Рп min |
|
|
I |
|
|
|
|
|
|
|
|
|
II |
В |
снижение |
|
|
|
|
|
|
|
|
0 V |
min |
V |
V |
max |
V |
|
нв |
|
|
Рис. 3.4. Характерные области и режимы полета
Кривая АВС соответствует установившемуся горизонтальному полету. Точка А соответствует минимальной скорости Vmin , определяемой по соотношению (3.9). Точка В соответствует наивыгоднейшей скорости Vнв , определяемой по соотношению (3.10), и минимальной потребной тяге Pп min . Точка С пересечения кривых потребной и располагаемой тяг соответствует максимальной скорости Vmax .
Область, лежащая выше кривой АВС, в каждой точке которой реализуемая тяга P превышает потребную тягу Pп , является областью установившегося набора высоты.
Область, лежащая ниже кривой АВС, в каждой точке которой реализуемая тяга P меньше потребной тяги Pп , является областью установившегося снижения.
Режимы установившегося горизонтального полета могут быть устойчивыми и неустойчивыми. Точки на кривой АВС, лежащие правее точки В, соответствуют устойчивому режиму, т. к. при непроизвольном увеличении или уменьшении скорости самолет самостоятельно (без вмешательства летчика) возвращается к первоначальному значению скорости.
22
Точки, лежащие левее точки В, соответствуют неустойчивому режиму, т.к. при непроизвольном увеличении или уменьшении скорости самолет самостоятельно не возвращается к первоначальному значению скорости.
Устойчивые режимы установившегося горизонтального полета называют первыми режимами (I), а неустойчивые - вторыми режи-
мами (II). Длительный полет на вторых режимах на практике не применяется, так как требует частого вмешательства летчика в управление полетом.
Р |
Р |
Н Н т |
Pп |
|
|
Pп |
|
|
|
|
|
|||
A |
C |
|
|
|
|
Pр |
|
|
Pр |
|
|
|
|
|
|
B |
|
|
|
Pп min
0 V |
min |
V |
V |
max |
V |
0 |
V V |
V |
V |
|
|
нв |
|
|
|
min |
нв |
max |
|
||
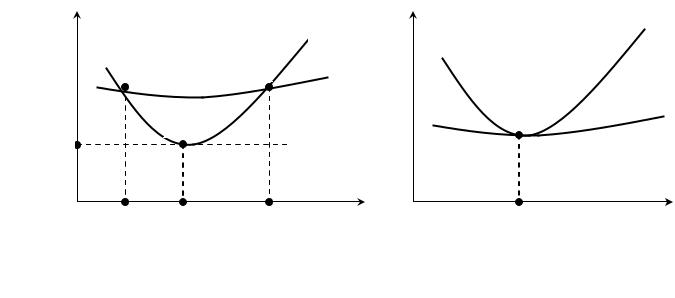
Рис. 3.5. Определение минимальной ско- |
Рис. 3.6. Диаграмма потребных и распо- |
|||||||||
|
рости на большой высоте |
|
лагаемых тяг на теоретическом потолке |
|||||||
С ростом высоты располагаемая тяга ТРД резко падает, и поэтому на больших высотах полета минимальная скорость Vmin определя-
ется точкой А пересечения кривых потребной и располагаемой тяг (рис. 3.5). По мере роста высоты полета и уменьшения располагаемой тяги Pр кривые потребной и располагаемой тяг сближаются. На неко-
торой высоте Н т , которая называется теоретическим потолком, они имеют единственную точку касания, соответствующую минимальной, наивыгоднейшей и максимальной скорости (рис. 3.6).
3.3. Диапазон высот и скоростей горизонтального полета. Ограничения, накладываемые на режимы движения
Зная зависимости минимальной Vmin , наивыгоднейшей Vнв и максимальной Vmax скоростей от высоты H , можно построить резуль-
тирующий график, который характеризует область установившихся режимов горизонтального полета, т. е. диапазон высот и скоростей, в
23
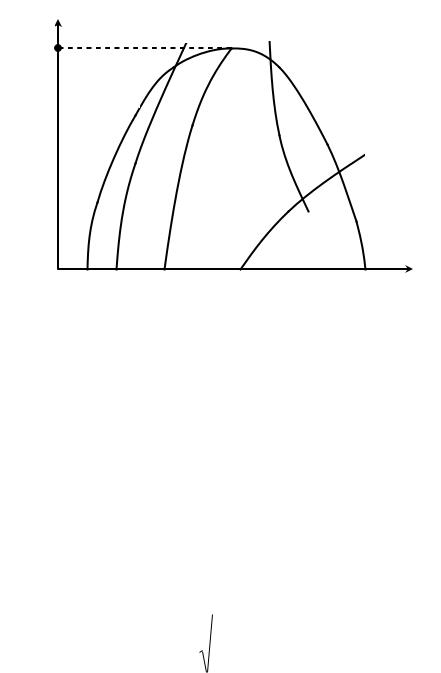
котором самолет при заданной полетной массе может совершать установившийся горизонтальный полет (рис. 3.7).
|
Vmin доп VM max |
Н |
H т
Vmin |
Vmax |
Vq max
Vнв
0 V
Рис. 3.7. Область установившихся режимов горизонтального полета
Рассмотрим эксплуатационные ограничения, накладываемые на режимы полета.
1.Ограничение по допустимому значению C ya доп коэффициента
аэродинамической подъемной силы. На минимальной скорости полета
Vmin , соответствующей максимальному значению C ya max коэффици-
ента аэродинамической подъемной силы (3.9), летать практически нельзя, так как даже небольшая ошибка в пилотировании или попадание самолета в восходящий поток (при этом увеличивается угол атаки) могут привести к сваливанию самолета. Поэтому на практике исполь-
зуется понятие минимальной допустимой скорости Vmin доп :
Vmin доп |
|
2mg |
|
. |
(3.11) |
|
|
||||||
SC yaдоп |
||||||
|
|
|
|
|
Обычно величина C ya доп равна 0,85 C ya max . Предупреждающими
признаками уменьшения скорости ниже минимально допустимой являются: появление тряски самолета, самопроизвольное кренение или кабрирование (увеличение угла тангажа), уменьшение эффективности органов управления.
2. Ограничение по максимальному скоростному напору qmax . Это
ограничение вводится по условиям прочности конструкции. Скорость самолета на высоте H не должна превышать некоторого значения Vq :
24

Vq 
 2qmax / ( H ) . (3.12)
2qmax / ( H ) . (3.12)
3. Ограничение по максимальному числу Маха М max . Это ограни-
чение для дозвуковых самолетов вызвано требованием обеспечения устойчивости и управляемости на больших высотах. Скорость самоле-
та на высоте H не должна превышать некоторого значения VM : |
|
VM M maxa( H ). |
(3.13) |
Зависимости Vmin доп , Vq max и VM max от высоты полета H показаны на рис. 3.7. Как видно из рисунка, эксплуатационные ограничения уменьшают область установившихся режимов горизонтального полета.
3.4. Расчет скороподъемности
При наборе высоты, т. е. при полете с положительным углом наклона траектории 0 , вертикальная составляющая скорости определяется по формуле (рис.3.8):
|
|
|
Vy |
V sin . |
|
|
(3.14) |
|
|
Используя первое из уравнений движения (1.11) и учитывая, что |
|||||||
V 0 , выразим sin : |
|
|
|
|
|
|||
Yg |
|
|
|
|
sin ( P X a ) / mg . (3.15) |
|||
|
|
|
|
Умножим правую и левую части |
||||
|
|
|
|
|||||
|
|
Vк |
|
на скорость V . Тогда получим |
||||
|
|
|
Vy |
|
V sin ( P X a )V / mg |
|||
|
|
|
|
и окончательно |
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
V * |
( P X |
a |
)V / mg , (3.16) |
|
|
|
|
|
||||
|
|
|
|
|
y |
|
|
|
|
O |
X g |
где звездочкой обозначено зна- |
|||||
|
чение |
вертикальной скорости |
||||||
|
|
|
|
|
||||
Рис. 3.8. Вертикальная составляющая скорости |
при установившемся наборе вы- |
|||||||
|
|
|
|
|
||||
|
|
|
|
|
соты, т. е. при V const . |
|||
|
При расчетах по упрощенному методу тяг предполагается, что |
|||||||
сила лобового сопротивления уравновешена потребной тягой: |
||||||||
|
|
|
Pп X a . |
|
|
(3.17) |
||
25
Обычно делается допущение, что на пологих траекториях ( 0 ) величина силы лобового сопротивления приблизительно равна величине силы лобового сопротивления в горизонтальном полете с той же скоростью и, следовательно, величине потребной тяги.
Тогда можно записать
V * PV / mg , |
(3.18) |
y |
|
где P P Pп - избыток тяги (с учетом того, что |
X a Pп ). Очевид- |
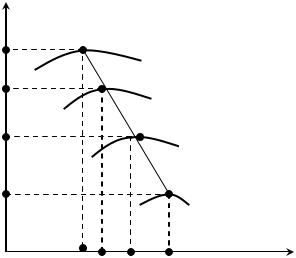
но, что вертикальная скорость V y* имеет наибольшее значение при максимальной располагаемой тяге двигателя Pр и зависит от скорости
полета V . Вертикальные скорости рассчитываются для ряда значений высот в летном диапазоне скоростей (рис. 3.9). По этим графикам для
Vy |
|
|
|
Н 0 |
|
Vy max (0) |
|
|
|
Н 2км |
|
Vy max (2) |
|
|
|
Н 4км |
|
Vy max (4) |
|
|
Vy max (8) |
Н 8км |
|
|
|
|
0 Vнаб (0) |
Vнаб (8) |
V |
|
||
Рис. 3.9. Зависимости вертикальной скорости при установившемся наборе высоты от скорости полета для различных высот
каждой высоты определяются максимальное значение вертикальной скорости Vy*max и соответствующая ей скорость Vнаб при наборе высоты.
Имея зависимость Vy max ( H ), можно определить максимальную высоту – теоретический потолок Н т , на которой еще возможен установившийся горизонтальный полет (при Vy max 0 ) (рис. 3.10). Помимо теоретического потолка определяют и практический потолок Н пр , под которым понимают высоту установившегося горизонтального по-
26
лета, на которой максимальная вертикальная скорость равна некото-
рой заданной величине Vy зад .
Определим время подъема самолета (скороподъемность) на различные высоты. Для этого используем введенное ранее кинематиче-
ское уравнение для высоты Н : |
|
|
dH / dt V sin . |
(3.19) |
|
Интегрируя уравнение (3.19) от начальной H 0 |
до текущей H вы- |
|
соты полета, получим |
|
|
|
H |
|
t( H ) |
dH / V sin . |
(3.20) |
|
H0 |
|
Поскольку при установившемся наборе высоты V sin V , то |
||
|
|
y |
|
H |
|
tнаб (H ) dH /Vy (H ), |
(3.21) |
|
|
H0 |
|
где tнаб - время набора высоты H . |
|
|
Н |
Н |
|
Н т |
Н т |
|
|
|
|
H пр |
|
|
0 V |
V |
0 |
tнаб |
yзад |
y max |
|
|
Рис. 3.10. Зависимость максимальной вер- |
Рис. 3.11. Барограмма подъема самолета |
||
тикальной скорости от высоты |
|
|
|
Зависимость времени набора от высоты полета tнаб (Н ) называют |
|||
барограммой подъема самолета (рис. 3.11). |
|
||
Поскольку Vy max при |
приближении к |
теоретическому потолку |
|
стремится к нулю, то время установившегося набора высоты на теоретический потолок получается бесконечно большим. В качестве примера отметим, что для самолета Ту-154 время набора высоты 11км составляет 21 минуту.
27
3.5. Расчет снижения самолета с работающим двигателем. Планирование самолета
Снижение самолета с заданной высоты полета на другую может
быть обусловлено |
различными обстоятельствами. К ним относятся |
||||||
|
|
|
Yg |
|
снижение самолета с крейсер- |
||
|
|
ской высоты до высоты полета |
|||||
|
по |
кругу |
перед совершением |
||||
|
Ya |
||||||
|
|
|
|
||||
X a |
|
посадки, |
экстренное снижение |
||||
|
|
|
|
|
|||
|
|
|
|
X g |
самолета с крейсерской высо- |
||
|
|
|
|
|
ты до безопасной высоты по- |
||
|
|
|
|
0 |
лета в случае разгерметизации |
||
|
О |
|
|
||||
|
|
|
кабины и т. д. |
||||
|
|
|
|
|
|||
|
|
|
|
|
Рассмотрим установивше- |
||
|
|
|
P |
|
|
||
|
|
|
|
еся |
прямолинейное снижение |
||
|
|
|
|
||||
|
|
|
mg |
V |
самолета с работающим двига- |
||
|
|
|
|
||||
Рис. 3.12. Силы, действующие на самолет |
телем (рис. 3.12). Из (1.11) при |
||||||
|
|
|
|||||
|
при снижении |
|
V 0 и 0 имеем соотно- |
||||
шения:
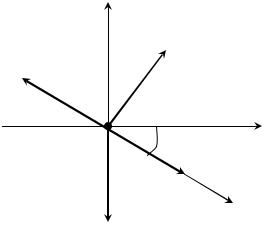
P X a mg sin 0, Ya mg cos 0.
Из них почленным делением можно получить tg (P X a ) / Ya .
Поскольку при снижении 0 , то tg 0 , P X a Определим вертикальную скорость снижения:
Vy сн V sin V (P X a ) / mg.
Поскольку, как и при наборе высоты, X a Pп , то
Vy сн PV / mg ,
где P P Pп 0 - недостаток тяги.
(3.22)
(3.23)
0 и P X a .
(3.24)
(3.25)
Рассмотрим теперь планирование, т. е. снижение самолета с нулевой тягой. Соотношения (3.22) и (3.23) можно переписать в виде
X a mg sin 0, Ya mg cos 0,
28
tg ( X a / Ya ) (1/ K). |
(3.26) |
Отсюда следует, что чем больше аэродинамическое качество при планировании, тем более пологой будет траектория самолета. Наиболее пологая траектория будет при K Kmax :
tg min ( 1 / Kmax ), |
(3.27) |
где индекс min надо относить к модулю угла .
Для крутого планирования при экстренном снижении нужно получить большие вертикальные скорости. Уменьшение аэродинамического качества достигается использованием воздушных щитков и тормозов, увеличивающих коэффициент силы лобового сопротивления.
3.6. Метод мощностей
Для самолетов с ТВД определение летных характеристик прово-
дится по методу мощностей, аналогичному упрощенному методу тяг
и основанному на сравнении потребных и располагаемых мощностей. Потребная мощность Nп определяется как произведение потреб-
ной тяги Рп на скорость полета V : |
|
Nп PпV . |
(3.28) |
Располагаемая мощность Nр равна |
|
Nр iN э max р , |
(3.29) |
где i - число двигателей, Nэ max - максимальная эквивалентная мощность, р - расчетный коэффициент полезного действия винта.
Типичная диаграмма потребных и располагаемых мощностей приведена на рис 3.13.
Кривая АВСD соответствует установившемуся горизонтальному полету. Точка А соответствует минимальной скорости Vmin , определя-
емой по соотношению (3.9). Наивыгоднейшая скорость Vнв соответствует точке С касания прямой, проведенной из начала координат, кривой потребной мощности. При докритических числах Маха полета ( М М кр ) она может определяться по соотношению (3.10).
Экономическая скорость Vэк соответствует минимальной потребной мощности Nп min (точка В). Максимальная скорость Vmax соответ-
ствует точке D пересечения кривых потребной и располагаемой мощностей.
29
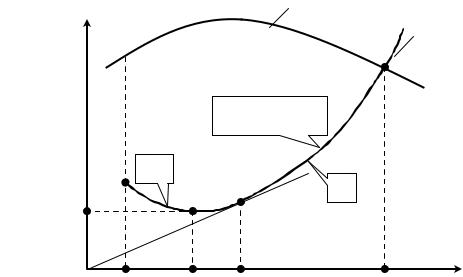
Область, лежащая выше кривой АВСD, в каждой точке которой реализуемая мощность N превышает потребную мощность Nп , является областью установившегося набора высоты.
Область, лежащая ниже кривой АВСD, в каждой точке которой реализуемая мощность N меньше потребной мощности Nп , является областью установившегося снижения.
|
|
|
Nр |
|
N |
|
|
|
|
|
|
D |
|
|
|
|
|
Nп |
|
|
|
|
||
|
|
|
|
|
|
|
набор высоты |
|
|
|
|
|
|
|
|
|
горизонтальный |
|
|
|
|
полет |
|
|
А |
II |
B |
С |
|
|||
|
|
|
Nп min
I
снижение
0 V |
V |
V |
V |
V |
min |
эк |
нв |
max |
|
Рис. 3.13. Диаграмма потребных и располагаемых мощностей
Участку ВСD соответствуют устойчивые (первые) режимы движения, а участку АВ – неустойчивые (вторые) режимы движения.
На рис. 3.14 приведен типичный диапазон высот и скоростей установившегося горизонтального полета самолета с ТВД.
На режимы полета самолета с ТВД накладываются те же эксплуатационные ограничения, что и рассмотренные в 3.3.
Установим связь между вертикальной скоростью и мощностью. Ранее было получено (3.18):
|
V * |
PV |
(P Рп )V |
. |
(3.30) |
||||
|
|
||||||||
|
y |
|
mg |
mg |
|
|
|
||
|
|
|
|
|
|
||||
Имея в виду, что N P V , а Nп PпV , запишем |
|
||||||||
|
V * |
N Nп |
|
N |
, |
|
(3.31) |
||
|
|
|
|
|
|||||
|
|
|
|
|
|||||
|
y |
|
mg |
|
mg |
|
|
|
|
|
|
|
|
|
|
|
|||
где N N |
Nп 0 - избыток мощности. |
|
|
|
|||||
30