

DPS_raschtraek
.pdfмается проекция земной скорости Vк на горизонтальную плоскость OX g Z g нормальной системы координат.
Yg
Yк вертикальная плоскость
|
|
X к |
|
|
|
Vк |
|
|
|
О |
|
|
|
|
|
|
|
|
|
|
|
|
Vп |
|
|
|
|
|
Z g |
|
X к |
|
|
|
|
|
|
горизонтальная |
X g |
|
плоскость |
|
||
|
|
||
|
Zк |
|
|
Рис 1.8. Взаимная ориентация траекторной и нормальной систем координат
Угол наклона траектории - угол между направлением земной скорости Vк и горизонтальной плоскостью OX g Z g нормальной систе-
мы координат. Он принимается положительным, когда проекция вектора земной скорости на ось OYg положительна (рис. 1.8).
1.4.Уравнения движения центра масс самолета
впроекциях на оси траекторной системы координат
Движение центра масс самолета описывается первым уравнением |
|||||
|
|
|
|
|
|
системы (1.5), которое после подстановки Fвн Ra G , где |
Ra - глав- |
||||
|
|
|
|
|
|
ный вектор аэродинамических сил и G - сила тяжести, примет вид |
|||||
|
P G . |
|
|
(1.6) |
|
m dVк R |
|
|
|||
|
|
|
|
|
|
dt a
Рассмотрим силы, входящие в правую часть векторного уравнения
(1.6).
11

Главный вектор аэродинамических сил Ra может быть разложен по осям скоростной системы координат со следующими составляю-
щими: X a - сила лобового сопротивления (составляющая по оси OX a ,
взятая с обратным знаком); Ya |
- аэродинамическая подъемная сила |
|||
(составляющая по оси OYa ); Za |
- аэродинамическая |
боковая сила (со- |
||
ставляющая по оси OZ a ). |
|
|
|
|
|
|
|
|
|
Y |
|
Сила тяги |
P обычно лежит в |
|
|
P |
плоскости |
симметрии самолета |
|
|
|
OXY и составляет некоторый из- |
||
|
|
вестный угол P (угол установки |
||
|
|
двигателя) |
с |
положительным |
P 0 |
|
|
|
|
направлением оси |
OX |
(рис. 1.9). |
|
Сила тяжести |
G mg при- |
|
O |
X ложена в центре масс самолета и |
||
Рис. 1.9. Определение угла установки |
направлена по местной вертика- |
||
двигателя |
ли вниз. |
|
|
Отметим, что при отсутствии
ветра земная скорость самолета совпадает с его воздушной скоростью
(Vк V ) и что на большей части траектории полет совершается без скольжения ( 0 ) или скольжение незначительно.
Если спроектировать векторное уравнение (1.6) на оси траекторной системы координат, то система уравнений движения центра масс самолета при отсутствии ветра и угла скольжения примет вид:
mV P cos( |
P |
) X |
a |
mg sin , |
|
|
|
|
|
||
mV P sin( P )cos a Ya cos a mg cos , |
(1.7) |
||||
|
|
|
|
|
|
mV cos P sin( p )sin a Ya sin a .
Вуравнения (1.7) входит масса самолета, которая в процессе полета может заметно меняться. Поэтому к динамическим уравнениям следует добавить уравнение, описывающее изменение массы самолета:
m с , |
(1.8) |
где с - секундный массовый расход топлива.
12

Перемещение самолета в пространстве описывается кинематическими уравнениями движения центра масс, которые получаются, если спроектировать векторное кинематическое уравнение
|
(1.9) |
|
dr |
V , |
|
|
|
|
dt
|
- радиус-вектор центра масс самолета, на оси стартовой системы |
||
где r |
|||
координат OX сYс Zс : |
|
|
|
|
xс |
V cos cos , |
|
|
y |
|
(1.10) |
|
с H V sin , |
||
|
zс |
V cos sin , |
|
где xс , yс , zс - координаты центра масс самолета в стартовой системе
координат, H - высота полета.
Основной режим движения, рассматриваемый в дальнейшем, это полет без крена ( a 0), т.е. полет в вертикальной плоскости. Тогда
от системы (1.7) останутся только первые два уравнения. Во многих случаях полет происходит с малыми углами атаки, угол установки двигателя p также мал, и поэтому можно считать, что
cos( P ) 1, sin( P ) P .
Как правило, проекция силы тяги на ось OYк существенно меньше подъемной силы: P( P ) Ya .
С учетом этих допущений уравнения движения самолета в вертикальной плоскости будут иметь вид:
|
|
mV P X |
a |
mg sin , |
|
(1.11) |
||||
|
|
|
|
|
|
|
|
|
||
|
|
mV Ya mg cos . |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ya ,Yк |
|
|
|
|
Эти уравнения можно по- |
|||
|
|
|
|
|
|
лучить, |
спроектировав силы |
|||
|
|
|
X a , X к |
|
P , X , |
Y и |
mg на оси тра- |
|||
|
|
|
|
|
||||||
|
V ,Vк |
|
|
|
a |
a |
|
|||
|
|
|
|
|
|
|
|
|
||
|
Ya |
|
|
|
|
|
екторной системы координат, |
|||
|
P |
|
|
|
совпадающей |
при сделанных |
||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
допущениях |
со скоростной и |
||
|
|
|
|
|
|
|
||||
|
|
O |
горизонтальная |
|
связанной (рис. 1.10). |
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||
|
|
|
плоскость |
|
|
|
|
|
|
|
X a |
|
|
|
|
Рис. 1.10. Силы, действующие на |
|||||
|
|
|
|
|
||||||
|
|
|
|
|
|
самолет при полете в вертикальной |
||||
|
|
mg |
|
|
|
|
|
|
плоскости |
|
|
|
|
|
|
|
|
|
|
||
13
2. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ТРАЕКТОРИЙ САМОЛЕТА
В качестве исходных данных для расчета траекторий самолета рассмотрим последовательно его аэродинамические характеристики и характеристики применяемых двигателей.
2.1. Аэродинамические характеристики самолета
Составляющие главного вектора аэродинамических сил определяются следующим образом:
X a |
|
|
Cxa |
|
|
||
Y |
|
q S |
C |
|
, |
(2.1) |
|
a |
|
|
|
ya |
|
|
|
Z |
|
|
|
C |
|
|
|
|
a |
|
|
|
za |
|
|
где q V 2 / 2 - скоростной напор, |
- |
плотность воздуха, V - ско- |
|||||
рость, Cxa - коэффициент силы лобового сопротивления, |
C ya - коэф- |
||||||
фициент аэродинамической подъемной силы, Cza - коэффициент аэродинамической боковой силы, S - площадь крыла.
С ya |
|
|
|
|
|
|
|
|
|
Наиболее важными яв- |
|||
|
|
|
|
|
|
|
|
ляются сила лобового со- |
|||||
|
|
|
|
|
|
|
|
|
|||||
C ya max |
|
|
|
|
|
|
|
|
противления X a |
и аэроди- |
|||
|
|
|
|
|
|
|
|
намическая подъемная сила |
|||||
|
|
|
|
|
|
|
|
|
|||||
С yaдоп |
|
|
|
|
|
|
|
|
Y , т.к. для многих режимов |
||||
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
полета угол скольжения и |
||||
С ya0 |
|
|
|
|
|
|
|
|
аэродинамическая |
|
боковая |
||
|
|
|
|
|
|
|
|
сила Za равны нулю. |
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Рассмотрим |
|
зависи- |
|
0 |
|
|
|
|
доп |
max |
|
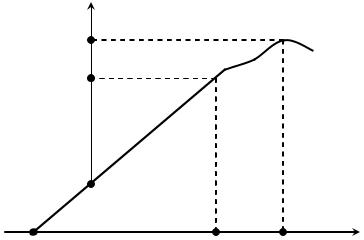
мость C ya ( ) (рис. 2.1). В |
|||||
|
0 |
|
|||||||||||
|
|
летном диапазоне углов ата- |
|||||||||||
|
|
|
|
|
|
|
|
|
ки до |
15...20 зависимость |
|||
Рис.2.1. Зависимость коэффициента аэродинамиче- |
C ya ( ) |
можно считать ли- |
|||||||||||
|
ской подъемной силы от угла атаки |
|
|||||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
нейной: |
|
|
||
|
|
|
|
|
C |
ya |
C |
( |
0 |
) , |
|
|
(2.2) |
|
|
|
|
|
|
ya |
|
|
|
|
|
||
где C |
|
C |
ya |
/ - частная производная коэффициента C |
ya |
по углу |
|||||||
ya |
|
|
|
|
|
|
|
|
|
|
|||
атаки; 0 - угол нулевой подъемной силы.
14

При больших углах атаки зависимость C ya ( ) становится существенно нелинейной. Нарушение линейности C ya ( ) связано с воз-
никновением на крыле местного срыва потока, развитие которого вызывает вибрации и тряску самолета. Наибольший угол атаки, при котором еще не появляется предупреждающая тряска самолета, называется допустимым углом атаки доп . Дальнейшее увеличение угла
атаки приводит сначала к некоторому увеличению C ya до максимального значения C ya max , а затем, из-за развития срыва потока, к его резкому падению. Значения C ya доп и C ya max являются важными характе-
ристиками самолета, во многом определяющими его маневренность, диапазон высот и скоростей полета и т. п. (Для самолета Ту-154:
доп 11...12 , C ya доп 0,72 , max
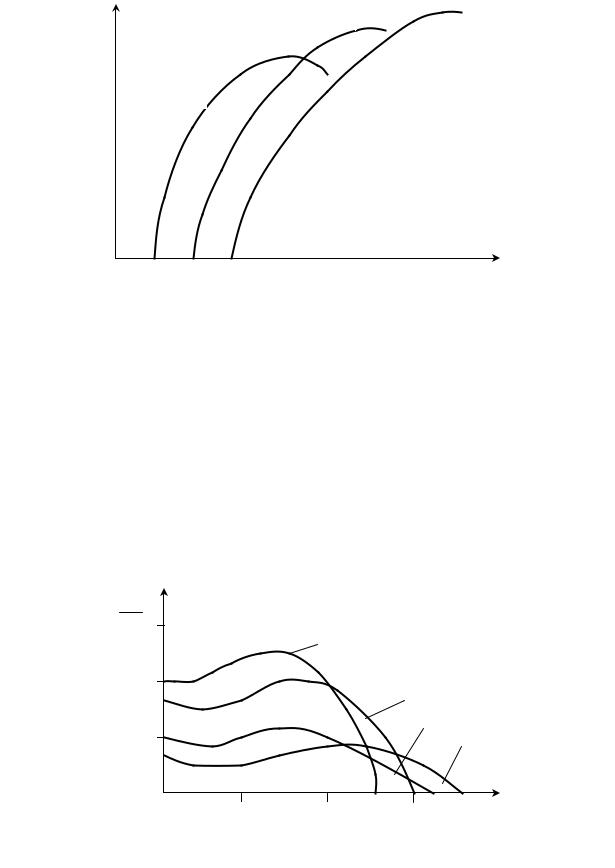
C ya |
M M кр |
|
|
M1 |
|
C yaнв |
M 2 |
|
M 3 |
||
|
21 , C ya max 1,3 ).
Сxa0
0 Cxa0 |
0,5 |
M кр |
1 M |
Сxa |
|
|
|
|
Рис.2.3. Зависимость Cxa0 |
от |
|
Рис. 2.2. Семейство поляр (M3>M2>M1>Mкр) |
числа Маха |
|
|
Зависимость Cxa ( C ya ) коэффициента лобового сопротивления
от коэффициента аэродинамической подъемной силы называется полярой самолета. В летном диапазоне углов атаки поляру с достаточной точностью можно представить в виде квадратичной зависимости
C |
xa |
C |
xa0 |
AC 2 |
, |
(2.3) |
|
|
ya |
|
|
15
где A 1/ эф - |
коэффициент отвала |
поляры; эф - |
эффективное |
||||||
удлинение крыла: |
|
|
|
|
|
|
|
; l 2 / S |
- удлинение |
эф |
|
|
|
|
|||||
|
|
|
|
||||||
|
|
1 |
/100 |
cos2 |
|
||||
|
|
|
|
||||||
крыла; l - размах крыла; - угол стреловидности крыла.
На рис. 2.2 и 2.3 приведено семейство поляр и зависимость Cxa0
от числа Маха для дозвукового самолета. Отметим, что при скоростях больших критической (M M кр ) с ростом числа M сопротивление
движению самолета резко возрастает (из-за возрастания волнового сопротивления).
Важной характеристикой самолета является его аэродинамическое качество
K C ya / Cxa . |
(2.4) |
Максимальное аэродинамическое качество |
Kmax соответствует |
так называемому наивыгоднейшему значению C ya нв коэффициента
аэродинамической подъемной силы (рис. 2.2). Используя квадратичную зависимость поляры (2.3), можно показать, что
Kmax |
|
|
|
Kmax |
1 |
|
|
. |
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
||||||||
20 |
|
|
|
|
|
|
|
2 Cxa0 A |
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
Значение |
Kmax |
во многом |
||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
характеризует |
предельные воз- |
||||||
10 |
|
|
|
|
|
можности, заложенные в аэроди- |
|||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
намике самолета. С ростом числа |
||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
M из-за |
возрастания сопротив- |
||||||
|
|
|
|
|
|
ления максимальное аэродинами- |
|||||||
|
|
|
|
|
|
||||||||
0 |
|
1 M |
ческое |
качество |
|
|
убывает |
||||||
Рис. 2.4. Зависимость максимального аэро- |
(рис.2.4). |
Например, у самолета |
|||||||||||
Ту-154 при M 0,4 |
- Kmax 16 , |
||||||||||||
динамического качества от числа Маха |
|||||||||||||
|
|
|
|
|
|
а при M 0,9 - Kmax |
10 . |
||||||
На взлете и посадке желательно получить прирост коэффициента подъемной силы даже ценой значительного прироста сопротивления, который можно компенсировать увеличением тяги. Для этого используют механизацию крыла самолета - отклоняемые щитки, закрылки, предкрылки и т. п. Типичные полетная, взлетная и посадочная поляры дозвукового самолета показаны на (рис. 2.5). Например, для самолета
16
Ту-154 при взлете закрылки отклоняются на 28 (C ya взл 1,92), а при посадке на 45 (C ya пос 2,15).
C ya |
взлет |
полет
посадка
0 |
Сxa |
|
Рис. 2.5. Полетная, взлетная и посадочная поляры |
2.2. Двигатели и их характеристики
На современных самолетах широкое применение получили силовые установки с воздушно-реактивными (турбореактивными - ТРД, двухконтурными - ТРДД) и турбовинтовыми (ТВД) двигателями. Зависимости силы тяги P , мощности N и удельного расхода Cуд топли-
ва при номинальном режиме работы двигателя от высоты и скорости полета называются высотно-скоростными характеристиками.
P |
|
|
|
|
P0 |
|
H 0 |
|
|
1 |
|
|
H 3км |
|
0,5 |
|
|
H 8км |
|
|
|
H 11км |
||
|
|
|
||
0 |
1 |
2 |
3 |
M |
Рис. 2.6. Зависимости тяги двигателя от числа Маха для различных высот
17
Суммарная тяга всех двигателей, установленных на самолете, с учетом потерь в воздушном тракте силовой установки, называется располагаемой тягой. Располагаемая тяга определяется для номинального, максимального или форсажного режима работы двигателей.
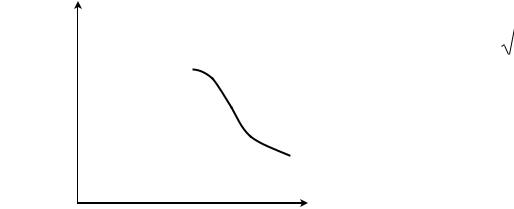
Удельный расход топлива Cуд - это расход массы топлива на еди-
ницу силы тяги в час (кг/Н ч), который характеризует экономичность двигателя. После высоты 11 км величина Cуд не зависит от высоты H .
|
Cуд |
|
|
|
|
|
|
|
|
H 3км |
H 8км |
|
|
|||
|
Суд0 |
|
|
|
|
H 0 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Н 11км |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
1 |
2 |
3 |
M |
|
|
|||||||
Рис. 2.7. Зависимости удельного расхода топлива от числа Маха для различных высот |
|
|||||||||||||||
На рис. 2.6 и 2.7 приведены типичные высотно-скоростные харак- |
||||||||||||||||
теристики ТРД. Здесь P0 - статическая |
тяга, |
P0 P( M 0,H 0 ), |
||||||||||||||
Cуд0 - удельный расход топлива при М 0 , Н 0 . |
|
|
||||||||||||||
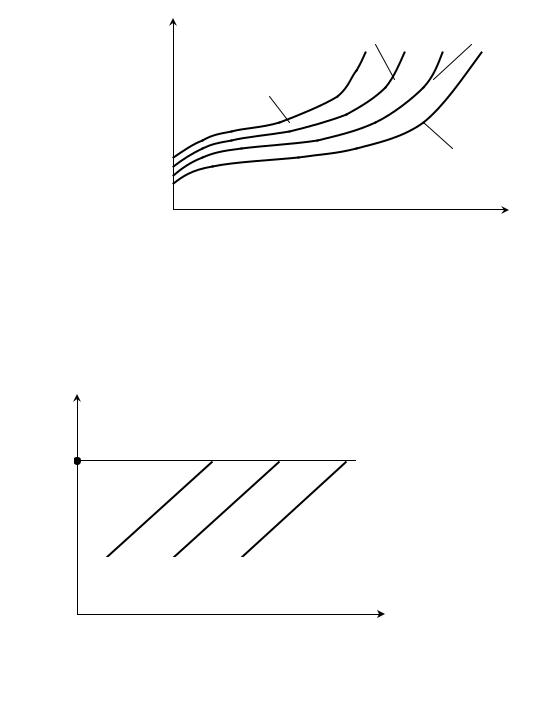
Nэ |
|
|
|
|
|
|
|
|
|
Характеристики |
ТВД |
|||||
|
|
|
|
0 H Hогр |
|
|
обычно задаются |
для |
||||||||
Nэогр |
|
|
|
|
|
|
условной или эквивалент- |
|||||||||
|
|
|
|
|
|
|
|
ной мощности Nэ . Систе- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Nэогр |
|
|
|
|
|
|
|
|
ма |
регулирования |
ТВД |
|||||
|
|
|
|
|
|
|
|
обеспечивает |
сохранение |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
постоянной |
эквивалент- |
|||
Н1 |
Н 2 |
Н 3 |
|
|
ной |
мощности Nэогр до |
||||||||||
|
|
определенной |
высоты |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
0 |
|
|
|
|
|
|
|
|
|
|
V |
H огр . На высотах, боль- |
||||
|
|
|
|
|
|
|
|
|
|
ших |
H огр , мощность уве- |
|||||
Рис 2.8. Высотно-скоростная характеристика |
||||||||||||||||
|
|
ТВД: Ногр<H1<H2<H3 |
|
|
личивается с ростом ско- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
рости (рис.2.8). |
|
|||
18
3. УСТАНОВИВШИЕСЯ РЕЖИМЫ ПОЛЕТА
Установившимися режимами полета самолета называются режи-
мы, для которых основные кинематические параметры остаются постоянными. Установившиеся режимы характерны для многих этапов полета.
При проектировании самолета основные его летные характеристики определяют именно на установившихся режимах: максимальную скорость при горизонтальном полете, теоретический и практический потолки, максимальную вертикальную скорость набора высоты и т.д.
3.1. Упрощенный метод тяг
Рассмотрим установившийся прямолинейный ( const ) полет самолета без крена и скольжения. Ранее были получены уравнения, описывающие полет самолета в вертикальной плос-
кости (1.11):
|
mV P X |
a |
mg sin , |
(3.1) |
|
|
|
||
|
mV Ya mg cos . |
|||
|
|
|
|
|
При V 0 имеем уравнения равновесия сил |
|
|||
|
|
|
|
|
|
P X a |
mg sin , |
(3.2) |
|
|
Ya mg cos . |
|||
|
|
|||
Одним из методов расчета летных характеристик самолета с ТРД в установившемся движении является метод тяг Н.Е. Жуковского. Идея метода заключается в сопоставлении потребного значения тяги двигателя для осуществления выбранного режима полета с располагаемым значением тяги, которое обеспечивает установленная на самолете силовая установка. Тяга, необходимая для прямолинейного установившегося полета под некоторым углом наклона к горизонту , назы-
вается потребной тягой Pп .
В большинстве случаев пользуются упрощенным методом тяг, принимая следующие предположения:
потребная тяга подсчитывается для прямолинейного установившегося горизонтального полета ( 0 );
19

угол ( Р ) считается малым, а проекция силы тяги существенно меньше аэродинамической подъемной силы: P( P ) Ya .
Учитывая, что sin 0 , |
а cos 1, из равенства (3.2) |
следуют |
||||||||||||
два основополагающих соотношения (рис. 3.1) |
|
|
|
|
|
|||||||||
Y |
|
|
|
|
|
|
|
Pп X a , |
Ya mg . |
(3.3) |
||||
a |
|
|
|
|
|
|
При |
установившемся го- |
||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
ризонтальном |
полете |
самолета |
|||||
|
|
|
|
сила тяги уравновешивает силу |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X a |
P |
|
|
V |
|
|
лобового сопротивления, а силу |
|||||||
|
|
|
|
|
||||||||||
O |
|
|
|
|
|
|
тяжести |
уравновешивает |
аэро- |
|||||
|
|
|
|
|
|
динамическая подъемная сила. |
||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
Потребная тяга, необхо- |
|||||||
|
|
|
|
|
|
|
димая для совершения устано- |
|||||||
|
|
|
|
|
|
вившегося горизонтального по- |
||||||||
mg |
|
|
|
|
|
|
||||||||
Рис. 3.1. Силы, действующие на самолет в |
|
лета |
с |
заданной скоростью, |
||||||||||
|
определяется |
из соотношений |
||||||||||||
установившемся горизонтальном полете |
|
|
||||||||||||
|
|
(3.3): |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P mg |
X |
a |
mg |
C |
xa |
S(V 2 |
/ 2) |
|
|
mg |
. |
|
(3.4) |
|
|
|
|
|
|
|
|
|
|
||||||
п |
Yа |
|
C ya S(V 2 / 2) |
|
K |
|
|
|
||||||
|
|
|
|
|
|
|||||||||
Совмещенный график зависимостей потребной тяги Рп |
и распо- |
|||||||||||||
лагаемой тяги Pр от скорости (числа М ) полета при заданных значе-
ниях массы самолета m , высоты полета H и режима работы двигате-
лей называется диаграммой потребных и располагаемых тяг. Рас-
смотрим последовательность расчетов при определении потребной тяги.
В общем случае |
|
Cxa f (C ya , M ), |
(3.5) |
поэтому при расчетах удобно задаваться числом Маха. Определяем коэффициент аэродинамической подъемной силы
|
|
|
|
C |
ya |
mg / q |
a |
SM 2 , |
(3.6) |
|
|
|
|
|
|
|
|
||
где |
qa (H ) |
a |
2 |
, а - скорость звука. |
|
|
(3.7) |
||
|
|
|
|
||||||
2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
По семейству поляр находим коэффициент лобового сопротивле- |
||||||||
ния |
Cxa ( C ya ,M ), затем рассчитываем аэродинамическое |
качество |
|||||||
K C ya / Cxa и потребную тягу Pп :
20