

5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
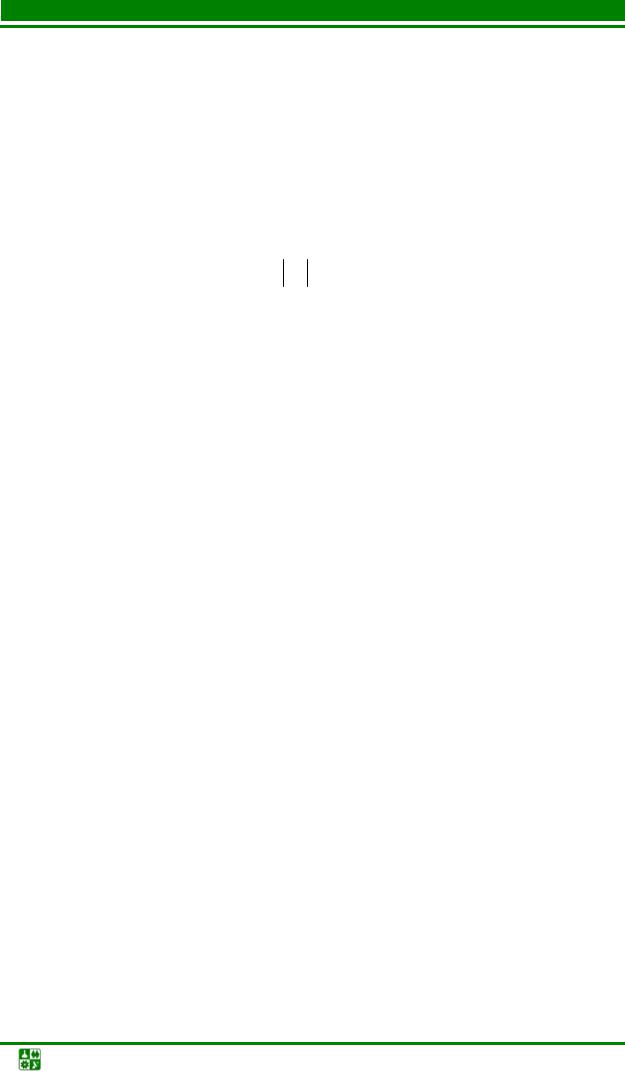
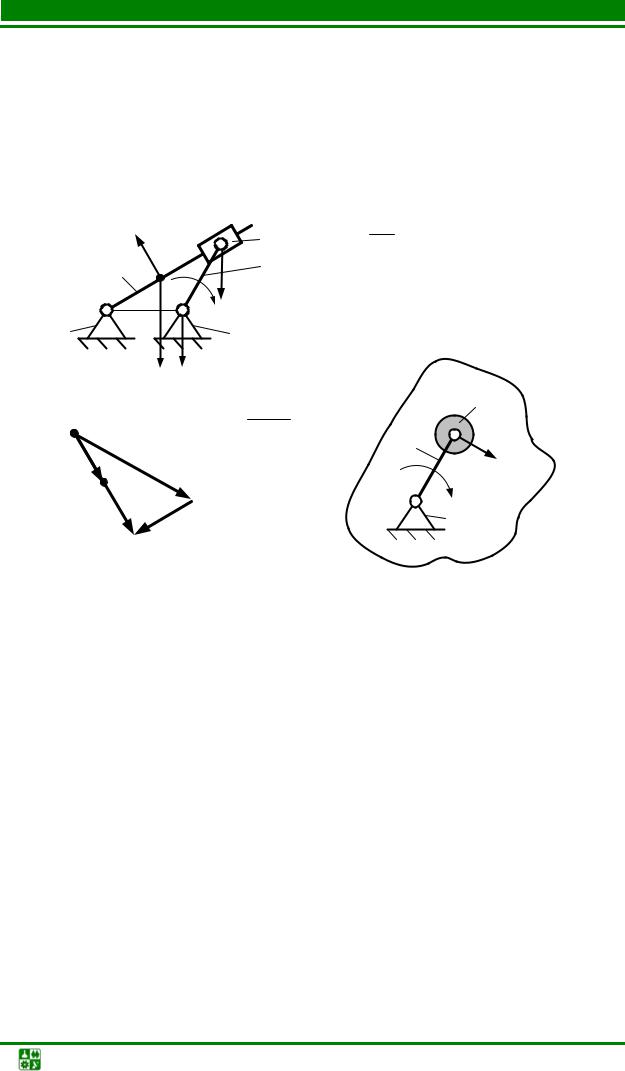
Задача 5.1. Ползун 3 кривошипно-ползунного механизма (рис. 5.1, а) находится под действием силы полезного сопротивления Fпс = 200 H. Найти
приведенную силу и приведенный момент сил. Данные для построения кинематической схемы механизма и плана скоростей взять из задачи 3.1, а для составления расчетной схемы – из задач 4.1 и 4.17.
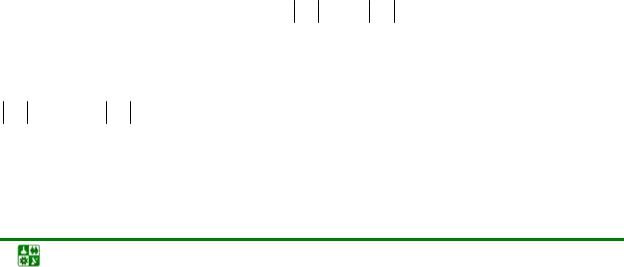
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему кривошипно-ползунного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 5.1, а).
2)Для полученной кинематической схемы исходя из условия задачи 3.1 строим план скоростей в соответствующем масштабном коэффициенте (рис. 5.1, б).
3)Исходя из условия задач 4.1 и 4.17 составляем расчетную схему (рис. 5.1, а) кривошипно-ползунного механизма. При этом на звенья механизма помимо силы полезного сопротивления действуют следующие силовые факторы.
Силы тяжести звеньев механизма, H, которые равны
G1 = m1 q = 0,45 m2 q = 0,45 3,4 9,81 =15,01 ,
G2 = m2 q =3,4 9,81 =33,35 ,
G3 = m3 q = 0,6 m2 q = 0,6 3,4 9,81 = 20,01.
4) Воспользуемся теоремой Жуковского. В масштабном коэффициенте скоростей строим повернутый на 90˚ план скоростей, поворот осуществляем в направлении движения кривошипа (рис. 5.1, в). В одноименные точки полученной фигуры с кинематической схемы кривошипноG-ползунногоG меха-
низма (рис. 5.1, а) переносим вектора внешних сил G1, G2 , G3 , Fпс, дейст-
вующие на звенья механизма (рис. 5.1, в). Для определения величины уравновешивающей силы составим сумму моментов всех сил, действующих на данную систему относительно полюса повернутого плана скоростей.
∑m(Fi ) p =0, или
G2 h1 − Fпс pb + FУ pa = 0 ,
где mp (G1) = 0, mp (G3 ) =0 , т. к. линии действия векторов GG1 и GG3 проходят через полюс плана скоростей точку р, а плечи моментов h1 =19 мм,
pb =46 мм, pа =48 мм.
Теория механизмов и машин. Практикум |
-110- |
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
1 |
A |
|
S2 |
|
|
μl |
= 0,01 |
м |
|
|
2 |
|
B, S3 |
|
мм |
|
|||
S , O |
|
|
F |
|
|
||||
|
|
|
|
|
|
||||
|
|
|
|
|
пс |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
0 |
|
|
G2 |
3 |
|
|
0 |
|
p, s1 |
G |
|
|
|
G3 |
|
|
|||
G1 |
|
a |
|
|
|
|
GG1 |
||
|
|
|
|
|
|
|
|||
|
|
μV |
= 0,5 |
|
м |
|
|
||
p, s1 |
VG |
c |
мм |
|
|
|
|||
b, s |
|
|
|
||||||
|
|
В |
|
|
|
|
|
||
|
|
|
|
3 |
|
a |
|
|
|
|
VGS |
|
|
|
|
|
|
|
|
|
2 |
VBA |
|
|
F |
s2 |
|
|
|
|
|
|
|
|
|
||||
G |
|
|
|
|
|
b, s3G |
|||
|
|
s2 |
|
|
У |
G |
|
||
|
|
|
|
|
|
|
|
|
|
VA ≡VAO |
|
|
|
|
|
|
2 |
h1 |
GG Fпс |
|
|
|
|
|
|
|
|||
|
a |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
в |
|
||
|
б |
|
|
|
|
|
|
|
|
Рис. 5.1. Приведение сил для кривошипно-ползунного механизма
Отсюда уравновешивающая сила, H, |
|
|
|
|||||||||
F = |
Fпс |
|
pb |
|
−G2 h1 |
= |
200 46 |
−33,35 |
19 |
=178,46 . |
||
|
|
|||||||||||
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||
У |
|
|
|
pa |
|
|
|
48 |
|
|
||
|
|
|
|
|
|
|
|
|
||||
Из третьего закона Ньютона известно, что «сила действия равна силе
противодействия», т. е.
FП = −FGУ,
где знак «–» указывает, что вектор приведенной силы направлен по линии действия вектора уравновешивающий силы, но в противоположном направлении. Тогда приведенная сила, H,
FП = FУ =178,46.
Приведенный момент, H м,
MП = FП lOA =178,46 0,24 = 42,83 .
В ы в о д. Приведенная сила равна 178,46 H , а приведенный момент сил составляет 42,83 H м.
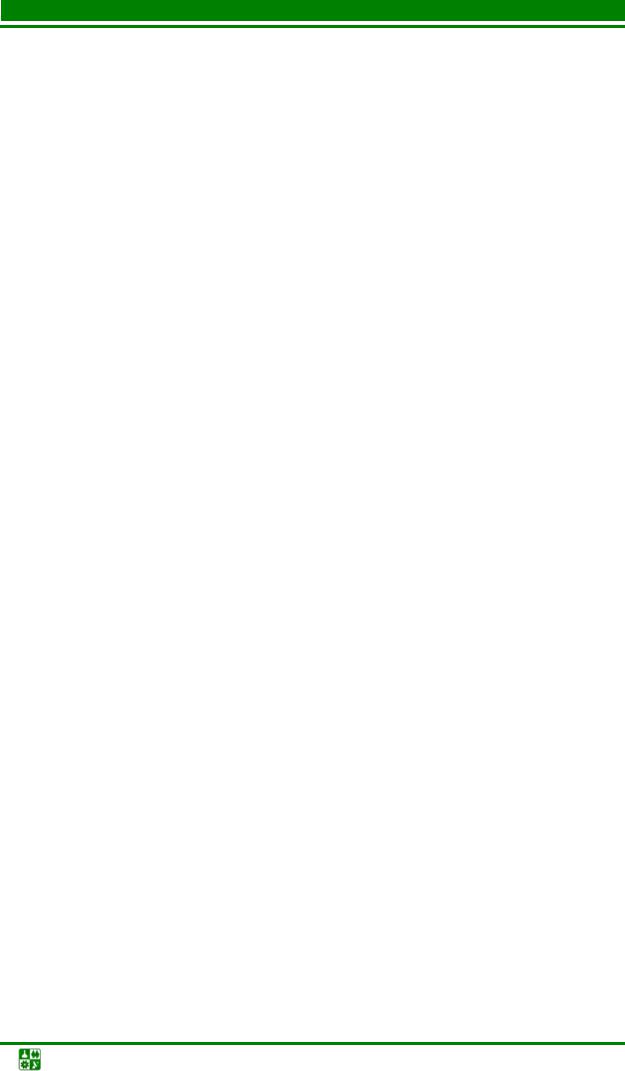
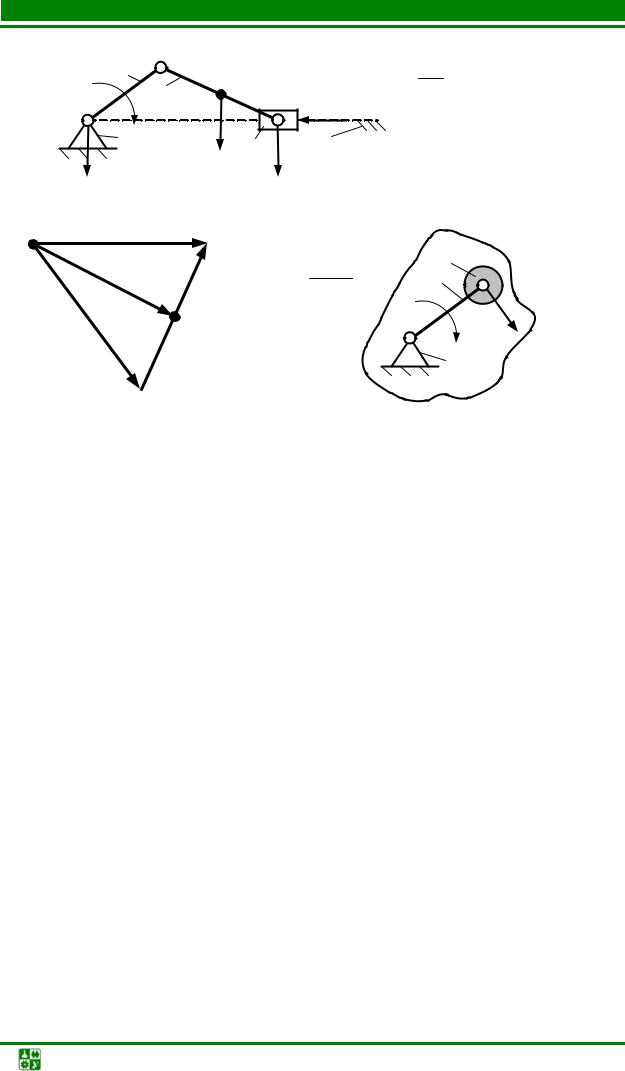
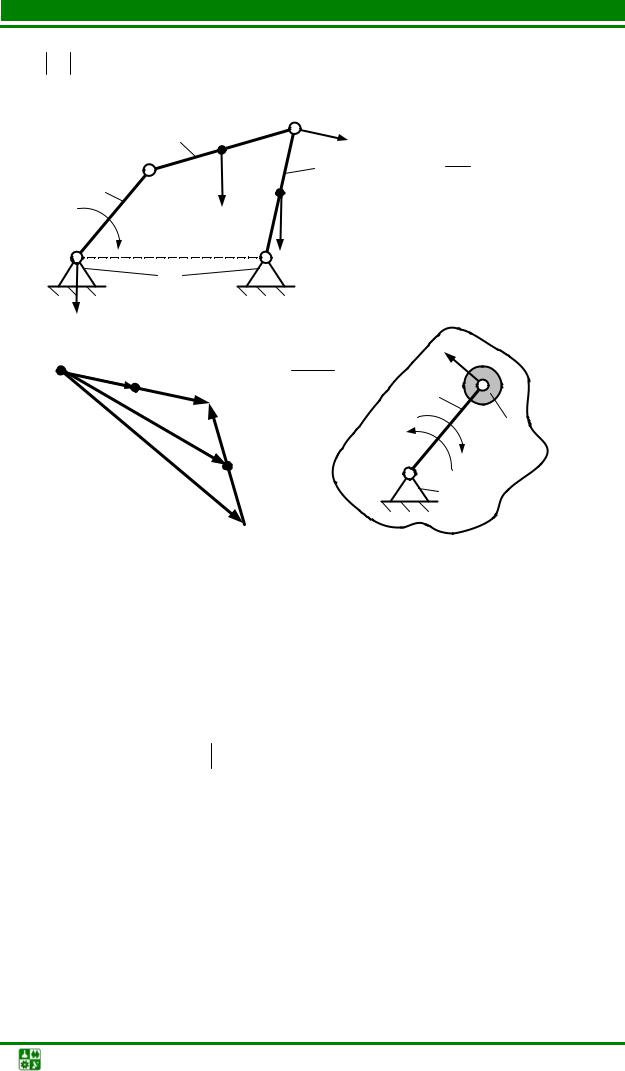
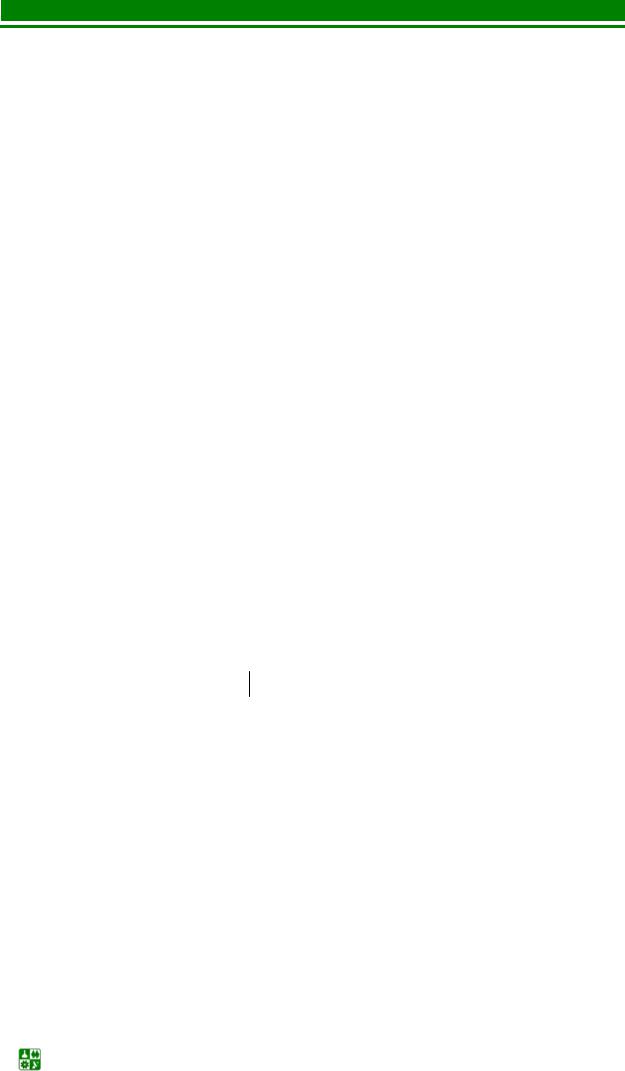
Задача 5.2. Коромысло 3 шарнирного механизма (рис. 5.2, а) находится под действием силы полезного сопротивления Fпс = 600 H. Найти приве-
денную силу и приведенный момент сил. Данные для построения кинематической схемы механизма и плана скоростей взять из задачи 3.2, а для составления расчетной схемы – из задач 4.2 и 4.18.
Теория механизмов и машин. Практикум |
-111- |
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
|
A |
2 S2 |
|
|
B |
|
Fпс |
м |
|
|
|
G |
|
|
|
3 |
μl = 0,01 |
||
|
1 |
|
S |
|
|
|
|
мм |
||
|
|
G2 |
3 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
S1, O |
|
|
|
|
|
G3 |
|
h |
|
|
|
|
|
|
|
|
|
O1 |
|
2 |
р, о, о1, s1 |
|
|
|
|
0 |
|
|
|
|
||
|
GG1 |
|
|
|
|
|
|
|||
|
|
a |
|
|
|
|
|
GG |
||
|
|
|
|
|
|
|
м |
|
1 |
|
s |
, о, о |
, p G |
|
μ = |
0,24 |
|
|
|||
1 |
1 |
|
VS3 |
s3 VG |
V |
|
|
с мм |
|
G |
|
|
|
b |
|
|
|
||||
|
|
|
|
В |
|
|
|
|
G3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VS2 |
|
|
FУ |
b |
G |
|
|
G |
G |
|
|
|
|||||
|
|
|
|
|
s2 |
Fпс |
||||
|
VАО |
≡VA |
|
s2 |
|
a |
|
|||
|
|
|
|
|
|
G2 |
|
|||
|
|
|
|
|
VBA |
|
h1 |
|
||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
б |
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
||
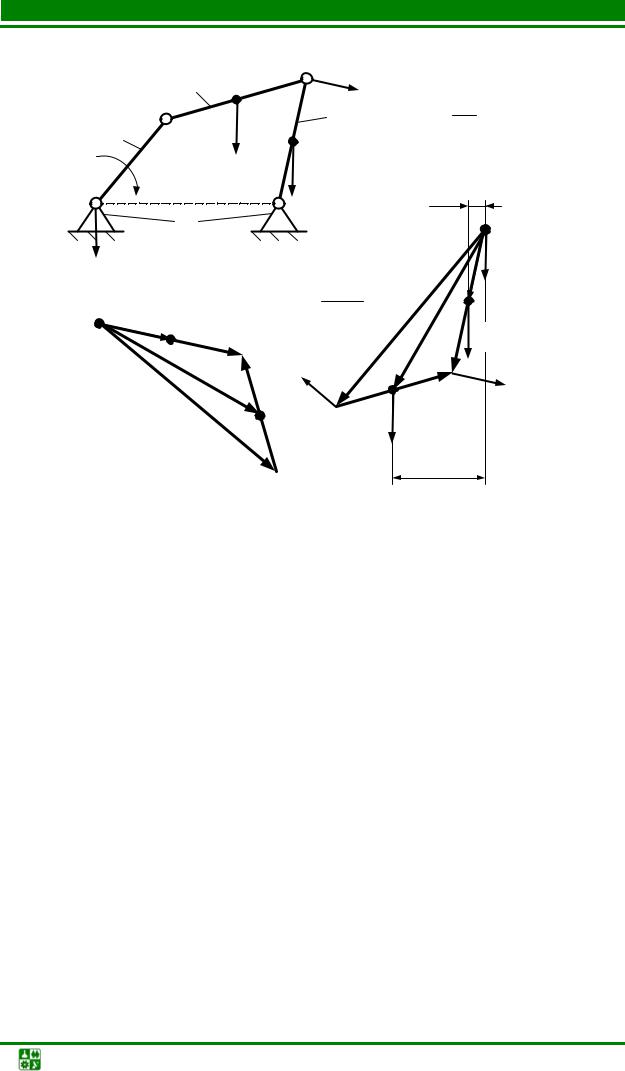
Рис. 5.2. Приведение сил для шарнирного механизма
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему шарнирного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 5.2, а).
2)Для полученной кинематической схемы исходя из условия задачи 3.2 строим план скоростей в соответствующем масштабном коэффициенте (рис. 5.2, б).
3)Исходя из условия задач 4.2 и 4.18 составляем расчетную схему (рис. 5.2, а) шарнирного механизма. При этом на звенья механизма помимо силы полезного сопротивления, действуют следующие силовые факторы.
Силы тяжести звеньев механизма, H, которые равны
G1 = m1 q = 0,45 m2 q = 0,45 4,5 9,81 =19,86 , G2 = m2 q = 4,5 9,81 = 44,15 ,
G3 = m3 q = 0,6 m2 q = 0,6 4,5 9,81 = 26,49 .
4) Воспользуемся теоремой Жуковского. В масштабном коэффициенте скоростей строим повернутый на 90о план скоростей, поворот осуществляем в направлении движения кривошипа (рис. 5.2, в).
В одноименные точки полученной фигуры с кинематической схемы шарнирного механизма (рис. 5.2, а) переносим вектора внешних сил G1 , G2 ,
GG3 , FGпс, действующих на звенья механизма (рис. 5.2, в). Для определения вели-
Теория механизмов и машин. Практикум |
-112- |

5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
чины уравновешивающей силы составим сумму моментов всех сил, действующих на данную систему относительно полюса повернутого плана скоростей.
∑m(Fi ) p =0, или
G2 h1 +G3 h2 + Fпс pb − FУ pa =0 ,
где mp (G1 ) =0, т. к. линии действия вектора G1 проходят через полюс плана
скоростей точку р, а плечи моментов |
h1 = 25 мм, |
h2 =5 мм, |
|
pb |
|
= 40 мм, |
|||||||||||||||||
|
|
||||||||||||||||||||||
|
pа |
|
=62 мм. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Отсюда уравновешивающая сила, H, |
|
|
|
|
|
|
||||||||||||||
|
|
|
F = |
G2 h1 +G3 h2 + Fпс |
|
pb |
|
= |
44,15 25 + 26,49 5 |
+600 40 |
= 407,04 . |
||||||||||||
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
У |
|
|
pa |
|
|
|
|
|
|
|
|
|
|
62 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Приведенная сила, H, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
FП = |
|
FУ |
|
= 407,04 . |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Приведенный момент, H м, |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
MП = FП lOA = 407,04 0,3 =122,11. |
|
|
|
|
|
||||||||||||
|
|
|
В ы в о д. |
Приведенная сила равна 407,04 H , а приведенный момент |
|||||||||||||||||||
сил составляет 122,11 H м. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Задача 5.3. |
Кулиса 3 |
|
кулисного |
механизма |
(рис. 5.3, а) находится |
|||||||||||||||
под действием силы полезного сопротивления Fпс =320 H. Найти приведен-
ную силу и приведенный момент сил. Данные для построения кинематической схемы механизма и плана скоростей взять из задачи 3.3, а для составления расчетной схемы – из задач 4.3 и 4.19.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему кривошипно-ползунного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 5.3, а).
2)Для полученной кинематической схемы исходя из условия задачи 3.3 строим план скоростей в соответствующем масштабном коэффициенте (рис. 5.3, б).
3)Исходя из условия задач 4.3 и 4.19 составляем расчетную схему (рис. 5.3, а) кулисного механизма. При этом на звенья механизма помимо силы полезного сопротивления действуют следующие силовые факторы.
Силы тяжести звеньев механизма, H, которые равны
G1 = m1 q = 0,29 m3 q = 0,29 4,25 9,81 =12,09 ,
G2 = m2 q = 0,38 m3 q = 0,38 4,25 9,81 =15,84 ,
G3 = m3 q = 4,25 9,81 = 41,69 .
Теория механизмов и машин. Практикум |
-113- |
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
FGпс |
|
μl |
= 0,01 |
м |
|
м |
|
|
мм |
μV = 0,079 |
||||
|
|
|
|
|
|
h3 |
с мм |
|
|
|
G2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
GG3 |
|
|
|
Fпс |
|
GG1 |
|
1 |
|
|
|
|
||
|
μ |
= 0,119 |
м |
|
|
G3 |
|
|
GV |
G |
с мм |
|
|
|
|
VGS |
VАО ≡VА |
|
|
G2 |
h2 |
|
|
G |
G |
G |
G |
|
FУ |
||||
VBО1 |
VB |
|||
VBА |
h1 |
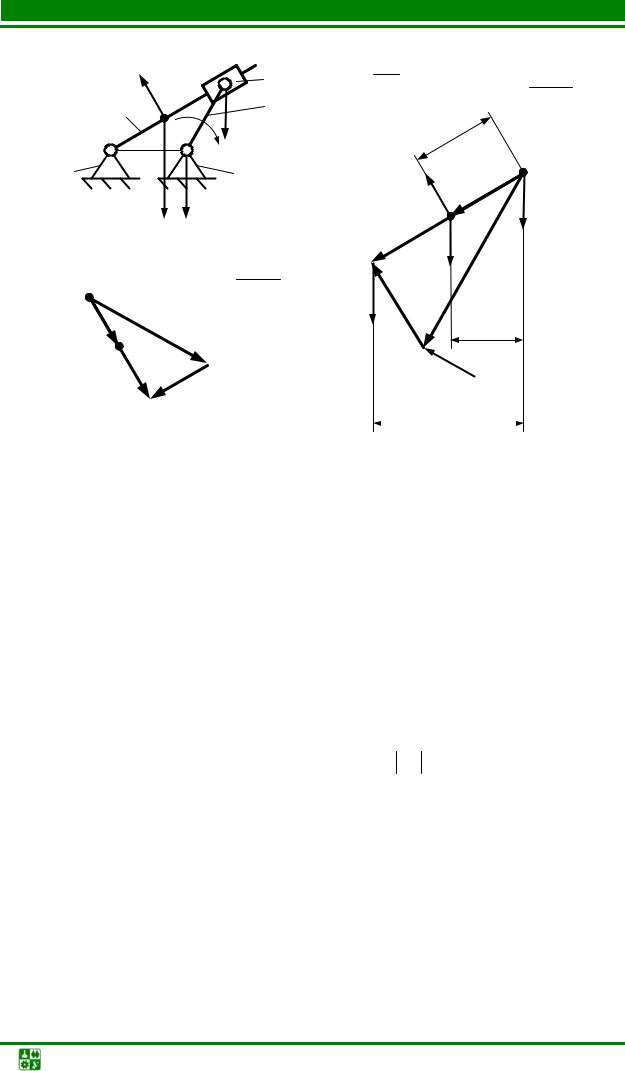
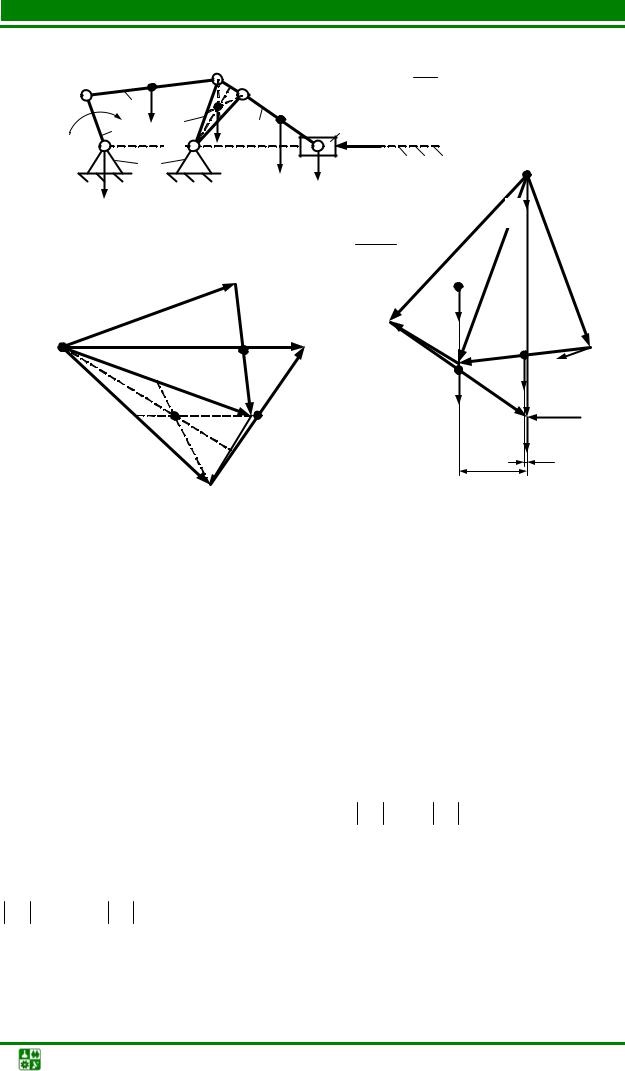
Рис. 5.3. Приведение сил для кулисного механизма
4) Воспользуемся теоремой Жуковского. В масштабном коэффициенте скоростей строим повернутый на 90о план скоростей, поворот осуществляем в направлении движения кривошипа (рис. 5.3, в). В одноименные точки полученной фигуры с кинематической схемы кулисногоG G механизма
(рис. 5.3, а) переносим вектора внешних сил G1 , G2 , G3 , Fпс, действующие
на звенья механизма (рис. 5.3, в). Для определения величины уравновешивающей силы составим сумму моментов всех сил, действующих на данную систему относительно полюса повернутого плана скоростей.
∑m(Fi ) p =0, или
G2 h1 +G3 h2 − Fпс h3 − FУ pa = 0 ,
где mp (G1) = 0, т. к. линия действия вектора G1 проходит через полюс плана
скоростей, а плечи моментов h1 |
= 40 мм, h2 =19 мм, h3 = 22 мм, |
|
pа |
|
=53 мм. |
|||||||||
|
|
|||||||||||||
|
|
|||||||||||||
Отсюда уравновешивающая сила, H, |
|
|
|
|
|
|
|
|||||||
F = |
G2 h1 +G3 h2 |
− Fпс h3 |
= |
15,84 40 + 41,69 19 |
−320 |
22 |
= −105,93 . |
|||||||
|
|
|
|
|
|
|
|
|||||||
У |
|
pa |
|
|
|
53 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Теория механизмов и машин. Практикум |
-114- |

5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Знак «–» означает, что вектор уравновешивающей силы действует противоположно направлению, показанному на рис. 5.3.
Приведенная сила, H,
FП = FУ =105,93 .
Приведенный момент, H м,
MП = FП lOA =105,93 0,2 = 21,19 .
В ы в о д. Приведенная сила равна 105,93 H , а приведенный момент сил составляет 21,19 H м.
Задача5.6. Ползун 3 механизма качающегося транспортера (рис. 5.6, а) находится под действием силы полезного сопротивления Fпс = 450 H. Найти
приведенную силу и приведенный момент. Данные для построения кинематической схемы взять из задачи 3.6, а для составления расчетной схемы – из задач 4.16 и 4.22.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему механизма качающегося транспортера в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 5.6, а).
2)Для полученной кинематической схемы исходя из условия задачи 3.6 строим план скоростей в соответствующем масштабном коэффициенте (рис. 5.6, б).
3)Исходя из условия задач 4.16 и 4.22 составляем расчетную схему (рис. 5.6, а) механизма качающегося транспортера. При этом на звенья механизма помимо силы полезного сопротивления действуют следующие силовые факторы.
Cилы тяжести звеньев механизма, H, которые равны
G1 = m1 q =1,82 9,81 =17,85 ,
G2 = m2 q =5,2 9,81 =51,01,
G3 = m3 q =3,9 9,81 =38,26 ,
G4 = m4 q =3,9 9,81 =38,26 ,
G5 = m5 q = 2,34 9,81 = 22,96 .
Теория механизмов и машин. Практикум |
-115- |
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
А |
|
S2 |
|
B |
|
μl |
= 0,01 |
м |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2 |
S3 |
|
S4 |
|
|
|
мм |
|
|
|
|
|
|
|
D, S5 5 |
|
|
|
|
|
|
|||
|
|
1 |
GG |
3 |
G |
4 |
|
F |
|
|
|
|
|
S |
, O |
2 |
О |
3 |
|
|
|
пс |
|
|
s1, о, о1, p |
||
|
|
|
|
|
|
|
|
|
|||||
1 |
|
|
0 |
1 |
|
G4 |
G5 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
GG1 |
|
а |
|
|
|
|
|
|
GG |
|
|
|
|
|
|
μ |
= 0,075 |
|
м |
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
V |
|
с мм |
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
s3 |
|
|
||
|
|
|
VA |
|
|
|
|
|
|
|
|
||
s , о, о , p |
|
|
VBA |
|
|
c |
G3 |
|
|
|
|||
|
|
|
|
|
|
|
|
||||||
1 |
1 |
|
|
|
|
VD |
d, s |
|
|
|
s2 |
|
|
|
|
|
|
|
|
|
|
|
b |
а |
|||
|
|
|
|
G |
s2 |
|
5 |
|
|
s4 |
|
||
|
|
|
|
|
|
|
|
|
G2 |
FУ |
|||
|
|
G |
|
VB |
b |
|
VDC |
|
|
|
|||
|
|
|
s3 |
|
|
|
G4 |
|
|
d, s |
|||
|
V |
|
|
|
|
|
|
|
|||||
|
|
C |
|
|
VCB |
s4 |
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
G |
Fпс |
||
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
h2 |
h1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
в |
|
Рис. 5.6. Приведение сил для механизма качающегося транспортера
4) Воспользуемся теоремой Жуковского. В масштабном коэффициенте скоростей строим повернутый на 90о план скоростей, поворот осуществляем в направлении движения кривошипа (рис. 5.6, в). В одноименные точки полученной фигуры с кинематической схемы механизма качающегосяG G G транс-
портера (рис. 5.6, а) переносим вектора внешних сил G1 , G2 , G3 , G4 , G5 , Fпс, действующих на звенья механизма (рис. 5.6, в). Для определения величины уравновешивающей силы составим сумму моментов всех сил, действующих на данную систему относительно полюса повернутого плана:
∑m(Fi )p =0 , или
G2 h1 +G4 h2 +G3 h2 − Fпс pd − FУ pa = 0 ,
где mp (G1 ) =0, mp (G5 ) = 0 , т. к. линии действия векторов GG1 и GG5 проходят через полюс плана скоростей точку р, а плечи моментов h1 =1 мм, h2 =19 мм,
pd =68 мм, pа =51 мм.
Отсюда, уравновешивающая сила, H,
Теория механизмов и машин. Практикум |
-116- |
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
F = |
G2 h1 +G4 h2 |
+G |
3 h2 − Fпс |
|
pd |
|
= |
|
|
|
|
|||||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
||
|
У |
|
pa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= |
51,01 1+38,26 19 +38,26 19 −450 68 |
= −570,49. |
|||||||
|
|
51 |
|
|
|
|
|
|
|
Знак «–» означает, что вектор уравновешивающей силы действует противоположно направлению показанному на рис. 5.6, в.
Приведенная сила, H,
FП = FУ =570,49 .
Приведенный момент, H м,
MП = FП lOA =570,49 0,15 =85,57 .
В ы в о д. Приведенная сила равна 570,49 H , а приведенный момент сил составляет 85,57 H м.
Задача 5.7. Найти приведенную силу и приведенный момент сил, если ползун 3 кривошипно-ползунного механизма находится под действием силы полезного сопротивления Fпс. Данные для построения кинематической схе-
мы и плана скоростей взять из задачи 3.7, а для составления расчетной схемы и значение силы полезного сопротивления – из задачи 4.6.
Задача 5.8. Найти приведенную силу и приведенный момент сил, если коромысло 3 шарнирного механизма находится под действием силы полезного сопротивления Fпс. Данные для построения кинематической схемы и пла-
на скоростей взять из задачи 3.8, а для составления расчетной схемы и значение силы полезного сопротивления – из задачи 4.7.
Задача 5.9. Найти приведенную силу и приведенный момент сил, если выходное звено плоского рычажного механизма находится под действием силы полезного сопротивления Fпс. Данные для построения кинематической
схемы и плана скоростей взять из задачи 3.9, а для составления расчетной схемы и значение силы полезного сопротивления – из задачи 4.8.
Задача 5.10. Из условия задачи 5.1 найти приведенную массу и приведенный момент инерции, а также построить динамическую модель криво- шипно-ползунного механизма (рис. 5.7, а). Данные для построения кинематической схемы и плана скоростей взять из задачи 3.1, для составления расчетной схемы – из задач 4.1 и 4.17, а для построения динамической модели – из задачи 5.1.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему кривошипно-ползунного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 5.7, а).
Теория механизмов и машин. Практикум |
-117- |
5.ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
2)Для полученной кинематической схемы исходя из условия задачи 3.1 строим план скоростей в соответствующем масштабном коэффициенте (рис. 5.7, б).
3)Для определения приведенной массы и приведенного момента инерции воспользуемся методом приведения. В качестве звена приведения выбираем кривошип 1, за точку приведения принимает подвижную точку А, все остальные звенья механизма считаем приводимыми звеньями.
В общем случае значения приведенной массы и приведенного момента инерции механизмов характеризуются следующими выражениями:
m = mI |
+ mII |
, |
|
(5.1) |
|||
П |
|
П |
|
П |
|
|
|
J |
П |
= J I |
|
+ J II |
, |
(5.2) |
|
|
П |
П |
|
|
|
||
где mПI , JПI , mПII , JПII – постоянная и переменная части приведенной массы и
приведенного момента инерции соответственно.
Постоянные части приведенной массы и приведенного момента инерции вычисляем по формулам
|
|
|
|
|
|
|
|
mI |
= mэ + mп |
+ m , |
(5.3) |
|
|
|
|
|
|
|
|
|
П |
П |
П |
1 |
|
|
|
|
|
|
|
JПI = JПэ + JПп + J1 |
= JПэ (1+ip1 )+ J1 , |
(5.4) |
||||
где J э |
, mэ |
, |
J п |
, mп |
, |
J |
1 |
, m – приведенные моменты инерции и массы, соот- |
||||
П |
П |
|
П |
П |
|
|
1 |
|
|
|
|
|
ветственно, энергетической машины, преобразующего устройства и ведущего звена плоского рычажного механизма рабочей машины; ip1 – передаточное
отношение от ротора энергетической машины до ведущего звена плоского рычажного механизма рабочей машины.
Условиями задачи величины приведенных моментов инерции и масс энергетической машины, преобразующего устройства и передаточное отношение не заданы, следовательно, значения этих параметров приравниваем к нулю. Тогда по выражению (5.3) получим, кг,
mI |
= m =0,45 m = 0,45 3,4 =1,53 , |
(5.5) |
|
П |
1 |
2 |
|
а по выражению (5.4), кг м2 –
J I |
= J |
1 |
= 0,167 |
m l2 |
= 0,167 1,53 0,242 =0,0147 . |
(5.6) |
П |
|
|
1 OA |
|
|
Теория механизмов и машин. Практикум |
-118- |
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
1 |
A |
2 |
|
S2 |
|
|
μl |
= 0,01 |
м |
|
|
|
|
|
|
|
B, S3 |
Fпс |
мм |
|
|
|
||||
S , O |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
|
|
GG |
|
|
|
|
|
|
|
|
|
|
G |
0 |
|
2 |
3 |
0 |
Параметры динамической модели |
||||||
|
|
|
|
|
G3 |
|
|
|
|
|
|
|
|
|
G1 |
|
|
a |
|
FП =178,46 Н |
|
|
mП = 6,2 кг |
||||
|
|
|
|
|
|
|
|||||||
|
|
|
G |
|
|
M П = 42,83Н м |
JП = 0,2835кг м2 |
||||||
p, s1 |
|
|
|
|
|||||||||
V |
|
b, s |
|
|
|
|
|
|
|
|
|||
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
mП |
A |
|
|
|
|
G |
|
G |
μV = 0,5 |
м |
|
|
|
||||
|
|
VS |
|
|
|
1 |
|
|
|
||||
|
|
|
2 |
VBA |
|
c мм |
|
|
|
FG |
|||
|
|
|
|
|
|
|
|
|
|
|
|||
VG |
≡VG |
|
|
s2 |
|
|
|
|
O |
|
|
||
|
|
|
|
|
|
|
|
M П |
П |
||||
A |
AO |
|
|
|
|
|
|
|
|
|
0 J |
|
|
|
|
a |
|
|
|
|
|
|
|
П |
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
б |
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
Рис. 5.7. К построению динамической модели |
|
|
||||||||
|
|
|
|
кривошипно-ползунного механизма |
|
|
|
||||||
Переменные части приведенных массы и момента инерции найдем по формулам
|
|
|
n−1 |
|
|
n−1 |
|
|
|
|
mII = |
|
2 ∑Ei |
|
|
2 ∑Ei |
|
|
|
||
|
i=1 |
= |
|
i=1 |
, |
(5.7) |
||||
|
V 2 |
V 2 |
||||||||
П |
|
|
|
|
|
|
|
|||
|
|
|
П |
|
|
A |
|
|
|
|
|
|
|
n−1 |
|
|
n−1 |
|
|
|
|
J II |
|
2 ∑Ei |
|
|
2 ∑Ei |
|
|
|
||
= |
|
i=1 |
|
= |
|
i=1 |
|
, |
(5.8) |
|
|
ω2 |
|
ω2 |
|
||||||
Ï |
|
|
|
|
|
|
|
|||
|
|
Ï |
|
|
|
1 |
|
|
|
|
где VП =VA , ωÏ =ω1 – линейная и угловая скорость звена приведения соот-
n−1
ветственно; ∑Ei – сумма кинетических энергий, развиваемых приводимыми
i=1
звеньями механизма; n – количество подвижных звеньев механизма.
Сумма кинетических энергий, развиваемых приводимыми звеньями кривошипно-ползунного механизма, определяется по формуле
n−1
∑Ei = E2 + E3 . (5.9)
i=1
Кинетическая энергия звеньев механизмов зависит от видов движений, ими совершаемых. Охарактеризуем движения, совершаемые звеньями кривошипно-ползунного механизма: кривошип 1 совершает только вращательное движение вокруг неподвижной точки О, шатун 2 – сложное движе-
Теория механизмов и машин. Практикум |
-119- |

5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
ние, а ползун 3 – поступательное вдоль прямой ОВ. Следовательно, кинетическую энергию приводимых звеньев представим в виде
|
|
|
|
|
|
|
m V 2 |
J |
s2 |
ω2 |
|
|||||
|
|
|
|
|
E |
2 |
= |
2 |
s2 |
+ |
|
2 |
, |
(5.10) |
||
|
|
|
|
|
2 |
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
m V 2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
E = |
3 |
s3 |
|
, |
|
(5.11) |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Js |
, ω |
2 , m2 , |
m3 , Vs |
, |
Vs |
– момент инерции, угловая скорость, массы, |
||||||||||
|
2 |
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
скорости центров масс соответствующих звеньев.
Представим кинематические параметры, содержащиеся в выражениях (5.7), (5.8), (5.10) и (5.11), через элементы плана скоростей:
VA = |
|
|
|
|
|
рa |
|
|
|
μV , |
(5.12) |
||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
ω |
1 |
= |
|
|
|
|
|
|
|
|
ра |
|
|
μV |
, |
(5.13) |
|||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
lОА |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Vs |
2 |
= |
|
|
|
|
|
|
рs2 |
|
|
μV , |
(5.14) |
||||||||||||
|
|
|
|
||||||||||||||||||||||
ω |
|
|
|
|
|
|
|
|
= |
|
аb |
|
|
μV |
, |
(5.15) |
|||||||||
2 |
|
|
|
|
|
||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
lАB |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Vs |
3 |
= |
|
рs3 |
|
μV , |
(5.16) |
||||||||||||||||||
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где рa , аb , рs2 , рs3 , μV – отрезки и масштабный коэффициент плана
скоростей (рис. 5.7, б).
Подставив последовательно выражения (5.14)–(5.16) в (5.10)–(5.11),
затем (5.10)–(5.11) в (5.9), а (5.9) и (5.12)–(5.13) в (5.7)–(5.8) и упростив их,
получим
|
|
|
|
|
mII |
= |
|
ps |
|
2 |
k + |
|
ab |
|
2 k |
|
+ |
|
|
ps |
|
|
2 k |
|
, |
|
|
|
(5.17) |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
П |
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
3 |
|
|
|
|
|
||||||||
|
|
|
J II = ( |
ps |
|
|
2 |
k + |
|
|
ab |
|
2 |
k |
|
+ |
|
ps |
|
2 |
k |
|
|
)k |
|
, |
(5.18) |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
П |
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|||||||
где коэффициенты, кг/мм2, |
|
|
m2 |
|
|
3,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
k = |
|
|
|
= |
|
|
|
=147,56 10−5 , |
|
|
|
|
|
(5.19) |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
ра |
|
2 |
482 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
Js |
2 |
|
|
|
|
|
|
|
|
|
|
0,0833 m |
l |
2 |
|
|
|
|
|
0,0833 m |
|
||||||||||||||||||||||||||||||||||
k |
2 |
= |
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
AB |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
= |
|||||||||
( |
|
ра |
|
lАВ )2 |
|
( |
|
|
ра |
|
lАВ )2 |
|
|
|
|
|
|
|
|
|
ра |
|
2 |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.20) |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
= |
|
0,0833 3,4 |
=12,29 |
|
10−5, |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
482 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Теория механизмов и машин. Практикум |
-120- |
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
k |
3 |
= |
|
m3 |
= |
0,6 m2 |
= |
0,6 3,4 |
=88,54 10−5 |
, |
(5.21) |
||||||
|
|
|
482 |
||||||||||||||
|
|
|
ра |
|
2 |
|
|
|
ра |
|
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||||||
где рa = 48 мм, а коэффициент, м2,
k |
4 |
=l2 |
= 0,242 = 0,0576 . |
(5.22) |
|
ОА |
|
|
Определив значения отрезков аb = 42 мм, рs2 = 42 мм, рs3 = 46 мм
(рис. 5.7, б), а также с учетом формул (5.19)–(5.22) по выражению (5.17) получим, кг, что
mПII = 422 147,56 10−5 +422 12,29 10−5 +462 88,54 10−5 = 4,67 , (5.23)
а по выражению (5.18), кг м2 , что
JПII = (422 147,56 10−5 + 422 12,29 10−5 + 462 88,54 10−5 )0,0576 = 0,2688. (5.24)
Подставив найденные по выражениям (5.5)–(5.6) и (5.23)–(5.24) значения в формулы (5.1)–(5.2) и вычислив их, получим
приведенную массу, кг, равную
mП =1,53 + 4,67 = 6,2 ,
и приведенный момент инерции, кг м2 , равный
JП = 0,0147 + 0,2688 = 0,2835 .
4) Составляем динамическую модель: берем звено приведения (кривошип 1), соединяем со стойкой посредством кинематической вращательной пары и ограничиваем область существования динамической модели (рис. 5.7, в). Для сохранения эквивалентности динамической модели и расчетной схемы кривошипно-ползунного механизма (рис. 5.7, а) к точке приведения прикладываем приведенную силу и приведенную массу, наличие которых является причинами развития на звене приведения приведенного момента сил и приведенного момента инерции.
Значения приведенной силы и приведенного момента сил возьмем из задачи 5.1.
В ы в о д. Приведенная масса равна 6,2 кг, а приведенный момент
инерции составляет 0,2835 кг·м3.
Задача 5.11. Из условия задачи 5.2 найти приведенную массу и приведенный момент инерции, а также построить динамическую модель шарнирного механизма (рис. 5.8, а). Данные для построения кинематической схемы и плана скоростей взять из задачи 3.2, для составления расчетной схемы из – задач 4.2 и 4.18, а для построения динамической модели – из задачи 5.2.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему шарнирного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 5.8, а).
Теория механизмов и машин. Практикум |
-121- |

5.ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
2)Для полученной кинематической схемы исходя из условия задачи 3.2 строим план скоростей в соответствующем масштабном коэффициенте (рис. 5.8, б).
3)Для определения приведенной массы и приведенного момента инерции воспользуемся методом приведения: в качестве звена приведения выбираем кривошип 1, за точку приведения принимает подвижную точку А, все остальные звенья механизма считаем приводимыми звеньями.
В общем случае значения приведенной массы и приведенного момента инерции шарнирного механизма по аналогии с задачей 5.10 определяются по выражениям (5.1) и (5.2).
Условиями задачи величины приведенных моментов инерции и масс энергетической машины, преобразующего устройства и передаточное отношение не заданы, следовательно, значения этих параметров приравниваем к нулю. Тогда постоянную часть приведенной массы найдем с учетом выражения (5.5), кг,
mI |
= m =0,45 m = 0,45 4,5 = 2,03 , |
(5.25) |
|
П |
1 |
2 |
|
а постоянную часть приведенного момента инерции определим по выраже-
нию (5.6), кг м2 :
J I |
= J |
1 |
= 0,167 m l2 |
= 0,167 2,03 0,302 =0,0305, |
(5.26) |
|
П |
|
1 |
OA |
|
|
|
Переменные части приведенных массы и момента инерции найдем по выражениям (5.7) и (5.8), а сумму кинетических энергий, развиваемых приводимыми звеньями шарнирного механизма, определим по выражению (5.9).
Охарактеризуем движения, совершаемые звеньями шарнирного механизма. Кривошип 1 совершает только вращательное движение вокруг неподвижной точки О, шатун 2 – сложное движение, а коромысло 3 – вращательное движение вокруг неподвижной точки О1, следовательно, кинетическую энергию приводимых звеньев представим в виде
|
|
|
|
|
|
|
m V 2 |
|
J |
s2 |
ω2 |
|
||||||
|
|
|
|
|
Е |
2 |
= |
2 |
s2 |
|
+ |
|
2 |
, |
(5.27) |
|||
|
|
|
|
|
2 |
|
|
|
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
J |
|
|
ω |
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
s3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
Е = |
|
3 |
|
, |
|
(5.28) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
3 |
|
|
|
2 |
|
|
|
|
|
|
|
где m2 , Vs |
|
2 , ω3 , |
Js |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, ω |
, |
Js – масса, скорость центра масс, угловые скоро- |
||||||||||||||||
|
2 |
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
сти, моменты инерции соответствующих звеньев.
Представим кинематические параметры, содержащиеся в выражениях (5.7), (5.8), (5.27) и (5.28), через элементы плана скоростей при помощи выражений (5.12)–(5.15), угловую скорость коромысла 3 представим выражением
ω = |
|
|
pb |
|
μV |
, |
(5.29) |
|
|
||||||
|
|
||||||
|
|
|
|
|
|||
3 |
|
|
lBO |
|
|
||
|
|
|
|
|
|||
|
|
1 |
|
|
|||
Теория механизмов и машин. Практикум |
-122- |
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
где рb , |
μV – отрезок |
и |
масштабный |
коэффициент |
|
плана скоростей |
|||||||||
(рис. 5.8, б). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
S2 |
|
|
B |
|
Fпс |
|
м |
|
|
||
|
|
A |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
3 |
μl = 0,01 |
|
|
|
||
1 |
|
|
G2 |
|
S |
|
|
|
|
|
мм |
|
|
||
|
|
|
3 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1, O |
|
|
|
|
|
|
|
G3 |
Параметры динамической модели |
||||||
|
|
|
|
|
|
O1 |
|
||||||||
|
|
|
0 |
|
|
|
|
FП |
= 407,04 Н |
|
|
|
mП = 3,65кг |
||
GG |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
a |
|
|
|
|
|
|
M П =122,11Н м |
JП = 0,1764кг м2 |
|||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
s1, о, о1, p |
|
|
|
μV |
|
|
|
м |
FП |
|
|
A |
|||
|
VS3 |
s |
G |
|
= 0,24 |
с |
|
|
|
|
|||||
|
|
3 |
VВ |
|
b |
|
|
мм |
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
G |
G |
|
|
VS2 |
|
|
|
|
|
|
MП |
|
|
|
mП |
VАО |
≡VA |
|
|
|
s2 |
|
|
|
|
O |
0 |
|
|
||
|
|
|
|
|
|
VBA |
|
|
|
|
J |
П |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
a |
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 5.8. К построению динамической модели шарнирного механизма
Подставив последовательно выражения (5.14)–(5.15) и (5.29) в (5.27)–(5.28), затем (5.27)–(5.28) в (5.9), а (5.9) и (5.12)–(5.13) в (5.7)–(5.8) и
упростив их, получим
mII |
= |
|
ps |
|
2 k + |
|
ab |
|
2 k |
|
+ |
|
pb |
|
2 k |
|
, |
|
|
(5.30) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
П |
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
J II = |
( |
ps |
|
2 |
k + |
|
ab |
|
2 |
k |
|
+ |
|
pb |
|
2 k |
|
)k |
|
, |
(5.31) |
|||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
П |
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где коэффициенты, кг/мм2,
|
|
|
|
|
|
|
k |
= |
|
|
m2 |
|
= |
4,5 |
|
|
=117,06 10−5 |
, |
|
|
(5.32) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
1 |
|
|
ра |
|
2 |
622 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
Js |
2 |
|
|
|
|
|
|
0,0833 m l |
2 |
|
0,0833 m |
|
||||||||||||
k |
2 |
= |
|
|
|
|
|
|
|
|
= |
2 |
AB |
= |
|
2 |
= |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
( |
|
ра |
|
lАВ )2 |
|
|
|
|
( |
|
ра |
|
lАВ )2 |
|
|
|
ра |
|
2 |
(5.33) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
= 0,0833 4,5 =9,75 10−5, |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
622 |
|
|
|
|
|
|
|
|
|
|
||||
Теория механизмов и машин. Практикум |
-123- |

5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
|
|
|
|
|
|
|
J |
s |
|
|
|
|
0,0833 m l2 |
|
0,0833 0,6 m |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
BO |
|
|
|
|
|
|
||||||||||
|
|
|
|
k = |
|
|
|
|
|
3 |
|
|
= |
|
|
|
|
|
|
|
|
|
1 |
= |
|
2 |
= |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
3 |
( |
|
ра |
|
lBO )2 |
|
|
|
( |
|
ра |
|
lBO )2 |
|
|
|
|
ра |
|
2 |
(5.34) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
= 0,0833 0,6 4,5 |
=5,85 10−5, |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
622 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
рa |
|
=62 мм, а коэффициент, м2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
k |
4 |
=l 2 = |
0,302 |
=0,09 . |
|
|
|
|
|
|
|
(5.35) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Определив значения отрезков |
|
аb |
|
=33 мм, |
|
рs2 |
|
=51 мм, |
|
рb |
|
= 40 мм |
||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
(рис. 5.8, б), а также с учетом выражений (5.32)–(5.35) по формуле (5.30) получим, кг, что
mII =512 |
9,75 10−5 |
+332 117,06 10−5 |
+ 402 5,85 10−5 |
=1,62, |
(5.36) |
П |
|
|
|
|
|
а по выражению (5.31), кг м2 , что
JПII = (512 9,75 10−5 +332 117,06 10−5 + 402 5,85 10−5 )0,09 =0,1459. (5.37)
Подставив найденные значения по выражениям (5.25)–(5.26) и (5.36)–(5.37) в формулы (5.1)–(5.2) и вычислив их, получим приведенную массу, кг, равную
mП = 2,03 +1,62 =3,65 ,
и приведенный момент инерции, кг м2 , равный
JП = 0,0305 + 0,1459 = 0,1764.
4) Составляем динамическую модель: берем звено приведения (кривошип 1), соединяем со стойкой посредством кинематической вращательной пары и ограничиваем область существования динамической модели (рис. 5.8, в). Для сохранения эквивалентности динамической модели и расчетной схемы шарнирного механизма (рис. 5.8, а) к точке приведения прикладываем приведенную силу и приведенную массу, наличие которых является причинами развития на звене приведения приведенного момента сил и приведенного момента инерции.
Значения приведенной силы и приведенного момента сил возьмем из задачи 5.2.
В ы в о д. Приведенная масса равна 3,65 кг, а приведенный момент инерции составляет 0,1764 кг м2 .
Задача 5.12. Из условия задачи 5.3 найти приведенную массу и приведенный момент инерции, а также построить динамическую модель кулисного механизма (рис. 5.9, а). Данные для построения кинематической схемы и плана скоростей взять из задачи 3.3, для составления расчетной схемы – из задач 4.3 и 4.19, а для построения динамической модели – из задачи 5.3.
Теория механизмов и машин. Практикум |
-124- |
5.ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Ре ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему кулисного механизма в масштабном коэффициенте
длин μl = 0,01 м/мм (рис. 5.9, а).
2) Для полученной кинематической схемы исходя из условия задачи 3.3 строим план скоростей в соответствующем масштабном коэффициенте (рис. 5.9, б).
FG |
μl |
=0,01 м |
|
пс |
|
мм |
|
|
G2 |
FП =105,93Н |
mП = 2,77кг |
|
|
||
G |
|
MП = 21,19 Н м |
JП = 0,07кг м2 |
G3 |
1 |
|
|
VGS3 |
VGBО1 VGB
μ |
|
= 0,119 м |
mП |
||
V |
G |
||||
|
|
с мм |
|||
VGАО ≡VGА |
|||||
|
FП |
||||
|
|
|
|
MП |
|
G |
|
|
JП |
||
VBА |
|
|
|||
Рис. 5.9. К построению динамической модели кулисного механизма
3) Для определения приведенной массы и приведенного момента инерции воспользуемся методом приведения: в качестве звена приведения выбираем кривошип 1, за точку приведения принимает подвижную точку А, все остальные звенья механизма считаем приводимыми звеньями.
В общем случае значения приведенной массы и приведенного момента инерции кулисного механизма по аналогии с задачей 5.10 характеризуются суммой переменной и постоянной частей и определяются по выраже- ниям (5.1) и (5.2).
Условиями задачи величины приведенных моментов инерции и масс энергетической машины, преобразующего устройства и передаточное отношение не заданы, следовательно, значения этих параметров приравниваем к нулю. Тогда постоянную часть приведенной массы найдем с учетом выражения (5.5), кг:
mI |
= m =0,29 m = 0,29 4,25 =1,23, |
(5.38) |
|
П |
1 |
3 |
|
Теория механизмов и машин. Практикум |
-125- |
5.ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
апостоянную часть приведенного момента инерции определим по выраже-
нию (5.6), кг м2 :
J I |
= J |
1 |
=0,167 m l2 |
= 0,167 1,23 0,202 =0,0082 . |
(5.39) |
|
П |
|
1 |
OA |
|
|
|
Переменные части приведенных массы и момента инерции найдем по выражениям (5.7) и (5.8), а сумму кинетических энергий, развиваемых приводимыми звеньями кулисного механизма, определим по формуле (5.9).
Охарактеризуем движения, совершаемые звеньями кулисного механизма: кривошип 1 совершает только вращательное движение вокруг неподвижной точки О, ползун 2 – поступательное вдоль оси кулисы 3, а кулиса 3 – вращательное движение вокруг неподвижной точки О1. Следовательно, кинетическую энергию приводимых звеньев представим в виде
|
|
|
|
m V 2 |
|
|
|
||
Е |
2 |
= |
|
|
2 |
s2 |
, |
(5.40) |
|
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
s3 |
ω2 |
|
|
|
Е |
|
= |
|
|
3 |
|
, |
(5.41) |
|
|
|
|
|
|
|
||||
3 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где m2 , Vs2 , ω3 , Js3 – масса, скорость центра масс, угловая скорость, момент
инерции соответствующих звеньев.
Представим кинематические параметры, содержащиеся в выражениях (5.7), (5.8), (5.40) и (5.41), через элементы плана скоростей при помощи вы-
ражений (5.12)–(5.14) и (5.29).
Подставив последовательно выражения (5.14) и (5.29) в (5.40)–(5.41),
затем (5.40)–(5.41) в (5.9), а (5.9) и (5.12)–(5.13) в (5.7)–(5.8) и упростив их,
получим,
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mII |
= |
|
|
|
ps |
|
2 k + |
|
pb |
|
2 k |
|
, |
|
|
|
|
|
|
(5.42) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J II = |
( |
ps |
|
2 |
k + |
|
pb |
|
2 |
k |
|
|
|
)k |
|
, |
|
|
|
|
(5.43) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
3 |
|
|
|
|
|
|
|||||
где коэффициенты, кг/мм2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
k = |
|
m2 |
|
|
= |
0,38 m3 |
|
= |
0,38 4,25 |
|
=13,18 10−4 , |
(5.44) |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
ра |
|
2 |
|
|
|
|
|
ра |
|
2 |
|
352 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
J |
s |
|
|
|
|
|
|
|
0,0833 m l2 |
|
|
|
|
|
0,0833 m |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
BO |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
k |
= |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
= |
|
|
3 |
|
= |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
3 |
|
( |
|
ра |
|
lBO )2 |
|
|
|
|
|
|
|
|
( |
|
ра |
|
lBO )2 |
|
|
|
|
|
|
|
|
ра |
|
2 |
|
(5.45) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 0,0833 4,25 = 2,89 10−4 , |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
352 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где |
|
рa |
|
=35 мм, а коэффициент, м2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
3 |
|
=l2 |
= 0,202 = 0,04 . |
|
|
|
|
|
|
|
(5.46) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
Теория механизмов и машин. Практикум |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-126- |
||||||||||||||||||||||||||||||||||

5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Определив значения отрезков рs2 =31 мм, рb =31 мм (рис. 5.9, б), а также с учетом выражений (5.44)–(5.46) по формуле (5.42) получим, кг, что
mII =312 13,18 |
10−4 |
+312 2,89 10−4 |
=1,54 , |
(5.47) |
П |
|
|
|
|
а по выражению (5.43), , что |
|
|
|
|
JПII = (312 13,18 10−4 +312 2,89 10−4 ) 0,04 = 0,0618 . |
(5.48) |
|||
Подставив найденные по выражениям (5.38)–(5.39) и (5.47)–(5.48) значения в формулы (5.1) – (5.2) и вычислив их, получим
приведенную массу, кг, равную
mП =1,23 +1,54 = 2,77 ,
и приведенный момент инерции, кг м2 , равный
JП = 0,0082 +0,0618 =0,07 .
4) Составляем динамическую модель: берем звено приведения (кривошип 1), соединяем со стойкой посредством кинематической вращательной пары и ограничиваем область существования динамической модели (рис. 5.9, в). Для сохранения эквивалентности динамической модели и расчетной схемы кулисного механизма (рис. 5.9, а) к точке приведения прикладываем приведенную силу и приведенную массу, наличие которых является причинами развития на звене приведения приведенного момента сил и приведенного момента инерции.
Значения приведенной силы и приведенного момента сил возьмем из задачи 5.3.
В ы в о д. Приведенная масса равна 2,77 кг, а приведенный момент инерции составляет 0,07 кг м2 .
Задача 5.15. Из условия задачи 5.6 найти приведенную массу и приведенный момент инерции, а также построить динамическую модель механизма качающегося транспортера (рис. 5.12, а). Данные для построения кинематической схемы и плана скоростей взять из задачи 3.6, для составления расчетной схемы – из задач 4.16 и 4.22, а для построения динамической модели – из задачи 5.6.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему механизма качающегося транспортера в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 5.12, а).
2) Для полученной кинематической схемы исходя из условия задачи 3.6 строим план скоростей в соответствующем масштабном коэффициенте (рис. 5.12, б).
Теория механизмов и машин. Практикум |
-127- |
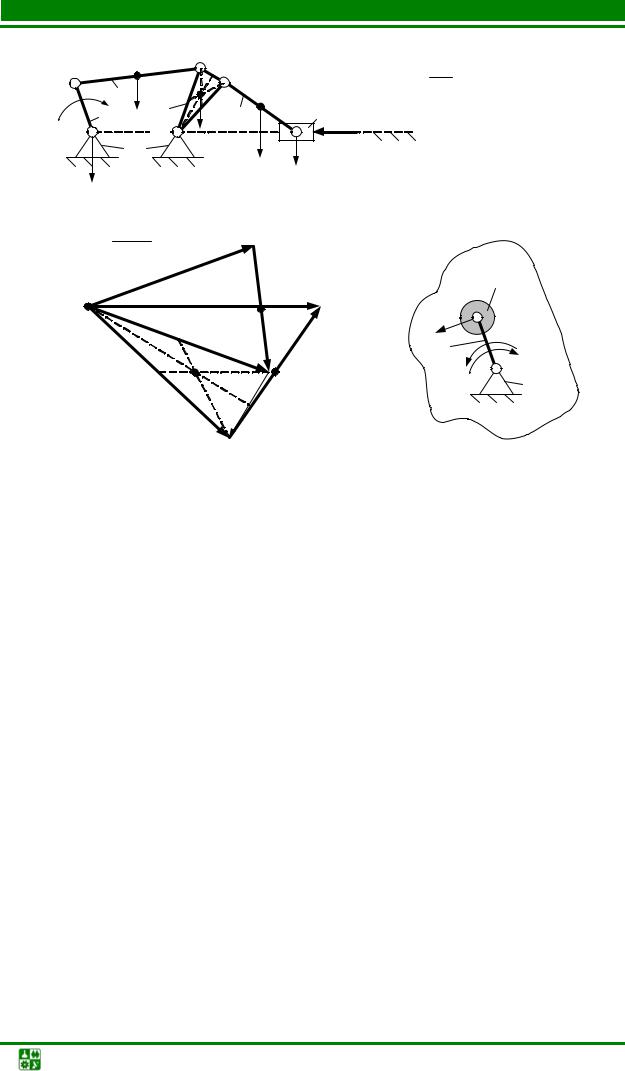
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
А |
|
S2 |
|
B |
|
|
|
|
|
μl |
= 0,01 |
м |
|
|
|
|
|
|
|
2 |
|
S3 |
S4 |
|
|
мм |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
1 |
G |
3 |
GG |
4 |
|
D, S5 5 |
F |
|
|
|
|
|
|
|
|
S |
, O |
2 |
О |
3 |
|
|
|
|
пс |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
0 |
1 |
|
G4 |
|
G5 |
|
Параметры динамической модели |
||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
G |
|
|
|
|
|
|
|
FП =570,49 Н |
|
mП = 20,68кг |
||||
|
|
|
1 |
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
=85,57 Н м |
J |
|
=0,4312кг м2 |
||
|
|
|
|
м |
|
VG |
а |
|
|
П |
П |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
μV |
= 0,075 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
с мм |
|
A |
|
|
VBA |
|
|
|
|
|
|
mП |
|
s1, о, о1, p |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
VD |
d, s5 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
s |
|
|
|
FП |
|
|
|
|||
|
|
|
|
|
|
VGB |
|
|
|
|
|
|
A |
||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
VDC |
|
|
|
1 |
|
|
|
||
|
|
|
|
V |
|
s3 |
|
b |
|
|
|
|
|
|
O |
||
|
|
|
|
C |
|
|
VCB |
s4 |
|
|
|
|
MП |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
JП |
|
|
|
|
|
|
б |
c |
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 5.12. К построению динамической модели механизма качающегося транспортера
3) Для определения приведенной массы и приведенного момента инерции воспользуемся методом приведения: в качестве звена приведения выбираем кривошип 1, за точку приведения принимает подвижную точку А, все остальные звенья механизма считаем приводимыми звеньями.
В общем случае значения приведенной массы и приведенного момента инерции механизма качающегося транспортера по аналогии с задачей 5.10 характеризуются суммой переменной и постоянной частей и определяются по выражениям (5.1) и (5.2).
Условиями задачи величины приведенных моментов инерции и масс энергетической машины, преобразующего устройства и передаточное отношение не заданы, следовательно, значения этих параметров приравниваем к нулю. Тогда постоянную часть приведенной массы найдем с учетом выражения (5.5), кг:
mI |
= m =0,35 |
m |
2 |
= 0,35 |
5,2 |
=1,82 , |
(5.65) |
П |
1 |
|
|
|
|
|
а постоянную часть приведенного момента инерции определим по выражению (5.6), кг м2 :
J I |
= J |
1 |
= 0,167 |
m l2 |
= 0,167 1,82 0,152 = 0,0068 . |
(5.66) |
|
П |
|
|
1 |
OA |
|
|
|
Переменные части приведенной массы и приведенного момента инерции найдем по выражениям (5.7) и (5.8).
Теория механизмов и машин. Практикум |
-128- |

5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Сумма кинетических энергий, развиваемых приводимыми звеньями,
n−1
∑Еi = Е2 + Е3 + Е4 + Е5 , (5.67)
i=1
где Е3 , Е5 , Е2 и Е4 – кинетическая энергия коромысла 3, ползуна 5 и шату-
нов 2 и 4 соответственно.
Кинетическая энергия звеньев механизмов зависит от вида движений ими совершаемых. Охарактеризуем движения, совершаемые звеньями механизма качающегося транспортера: кривошип 1 совершает только вращательное движение вокруг неподвижной точки О, шатуны 2 и 4 – сложные движения, коромысло 3 – вращательное движение вокруг неподвижной точки О1, а ползун 5 – поступательное вдоль прямой ОD. Следовательно, кинетическую энергию звеньев представим в виде
|
|
|
|
|
|
|
|
m V 2 |
|
J |
s2 |
ω2 |
|
|
|
|
|||||||
|
|
|
|
|
Е |
2 |
= |
|
2 |
|
s2 |
|
+ |
|
|
2 |
, |
|
|
(5.68) |
|||
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
J |
|
|
ω |
2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
s3 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Е |
|
= |
|
3 |
|
, |
|
|
|
|
(5.69) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
3 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
m V 2 |
J |
|
|
ω2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
s4 |
|
|
|
|
||||||||||
|
|
|
|
|
Е |
4 |
= |
|
4 |
|
s4 |
|
+ |
|
|
4 |
, |
|
|
(5.70) |
|||
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
m V 2 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
Е = |
|
5 |
|
s5 |
|
, |
|
|
|
|
(5.71) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Js |
, |
Js , |
Js |
, ω |
2 , ω3 , ω4 , m2 , m4 , |
m5 , |
Vs |
, Vs |
4 |
, Vs |
– моменты инерции, |
||||||||||||
|
2 |
3 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
5 |
||
угловые скорости, массы, скорости центров масс соответствующих звеньев. Представим кинематические параметры, содержащиеся в выражениях (5.7), (5.8), (5.68) и (5.69), через элементы плана скоростей при помощи выражений (5.12)–(5.15) и (5.29), а в выражениях (5.70) и (5.71) используются
зависимости
|
|
|
|
|
|
|
|
|
|
|
|
ω |
4 |
= |
|
|
|
|
|
|
сd |
|
μV |
, |
|
(5.72) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lCD |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Vs |
4 |
= |
|
|
|
рs4 |
|
μV , |
|
(5.73) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Vs |
= |
|
|
рs5 |
|
|
μV , |
|
(5.74) |
||||||||||
где |
|
сd |
|
|
|
рs4 |
|
|
|
рs5 |
|
5 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
, |
|
|
, |
|
|
, μV – отрезки и масштабный коэффициент плана скоро- |
|||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||
стей (рис. 5.12, б). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.14)–(5.15), |
(5.29) |
и |
||||||||||
|
|
Подставив |
|
последовательно |
выражения |
||||||||||||||||||||||||||
(5.72)–(5.74) в (5.68)–(5.71), затем |
(5.68)–(5.71) |
в (5.67), а |
(5.67) |
и |
|||||||||||||||||||||||||||
(5.12)–(5.13) в (5.7)–(5.8) и упростив их, получим |
|
|
|
||||||||||||||||||||||||||||
Теория механизмов и машин. Практикум |
-129- |

5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
|
|
|
|
mII |
= |
|
ps |
|
|
|
2 |
|
|
k + |
|
ab |
|
2 k |
|
+ |
|
|
|
|
pb |
|
|
2 k |
|
|
|
|
|
+ |
|
|
ps |
|
|
2 |
|
|
k |
|
+ |
|
сd |
|
2 k |
|
+ |
|
ps |
|
2 k |
|
, |
(5.75) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
П |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
5 |
|
|
|
|
|
|
6 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ps |
|
|
|
|
2 k |
|
|
+ |
|
ab |
|
2 |
|
|
k |
|
|
|
+ |
|
|
|
pb |
|
|
2 k |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
JПII |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
k7 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.76) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
ps |
|
|
|
|
|
|
|
|
+ |
|
сd |
|
|
|
|
+ |
|
ps |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где коэффициенты, кг/мм2, |
|
|
|
|
|
|
m2 |
|
|
|
|
|
|
|
|
|
5,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
=192,31 10−5 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.77) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
ра |
|
2 |
|
|
|
|
|
522 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Js |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,0833 m |
l |
2 |
|
|
|
|
|
|
|
|
0,0833 m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
k |
2 |
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
AB |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
= |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
ра |
|
|
|
|
lАВ )2 |
|
|
|
|
|
|
|
( |
|
|
|
|
|
ра |
|
lАВ )2 |
|
|
|
|
|
|
|
|
|
|
|
ра |
|
|
2 |
|
|
|
|
|
|
|
|
(5.78) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
0,0833 5,2 =16,02 |
10−5, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
502 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
3 |
|
= |
|
|
|
|
|
|
|
|
= |
|
|
0,75 m2 |
= |
|
|
0,75 5,2 |
|
|
|
|
=144,23 10−5 , |
|
|
|
|
|
|
(5.79) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ра |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ра |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
522 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
4 |
|
|
|
|
= |
|
|
m4 |
|
|
|
|
|
= |
0,75 m2 |
= |
5,2 |
|
|
|
=144,23 10−5 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.80) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
522 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Js |
|
|
|
|
|
|
ра |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ра |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,0833 m |
|
l2 |
|
|
|
|
|
|
|
|
|
0,0833 0,75 m |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
k |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
СD |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
= |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
( |
|
ра |
|
lCD )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
ра |
|
|
lСD )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ра |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.81) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 0,0833 0,75 5,2 =12,01 10−5, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
m5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
522 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
k |
6 |
= |
|
|
|
|
|
= |
0,6 m4 |
|
|
|
|
= |
0,6 0,75 m2 |
|
= |
0,6 0,75 5,2 |
=86,54 10−5 |
, |
|
(5.82) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ра |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ра |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ра |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
522 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
где |
|
|
рa |
|
=52 мм, а коэффициент, м2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
7 |
=l |
|
2 |
|
|
= 0,152 =0,0225 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.83) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
Определив значения отрезков |
|
рs2 |
|
|
=51 мм, |
|
|
аb |
|
=37 мм, |
|
|
|
pb |
|
=56 мм, |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
рs4 |
|
|
=58 мм, |
|
cd |
|
= 47 мм, |
|
|
|
|
|
|
|
рs5 |
|
= 68 мм (рис. 5.12, б), а также с учетом выра- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
жений (5.77)–(5.83) по формуле (5.75) получим, кг, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
mII |
|
=512 192,31 10−5 +372 16,02 10−5 +562 144,23 10−5 + |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.84) |
|
|
|
|
|
|
+582 144,23 10−5 +472 12,01 10−5 +682 86,54 10−5 =18,86, |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
а по выражению (5.76), кг м2 , что
Теория механизмов и машин. Практикум |
-130- |
5. ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
|
|
2 |
192,31 +37 |
2 |
16,02 + |
|
|
|
|
|
|
|
|||||
|
II |
|
|
51 |
|
|
|
|
|
−5 |
|
|
|
||||||
J |
= |
|
+ 56 |
2 |
144,23 + 58 |
2 |
144,23 |
+ |
|
10 |
0,0225 |
=0,4244. |
(5.85) |
||||||
П |
|
|
|
|
|
||||||||||||||
|
|
|
|
+ 47 |
2 |
12,01 + 68 |
2 |
|
86,54 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Подставив найденные значения по выражениям (5.65) – (5.66) и (5.84) – (5.85) в формулы (5.1) – (5.2) и вычислив их, получим
приведенную массу, кг, равную
mП =1,82 +18,86 = 20,68,
и приведенный момент инерции, равный
JП = 0,0068 + 0,4244 = 0,4312 .
4) Составляем динамическую модель: берем звено приведения (кривошип 1), соединяем со стойкой посредством кинематической вращательной пары и ограничиваем область существования динамической модели (рис. 5.12, в). Для сохранения эквивалентности динамической модели и расчетной схемы механизма качающегося транспортера (рис. 5.12, а) к точке приведения прикладываем приведенную силу и приведенную массу, наличие которых является причинами развития на звене приведения приведенного момента сил и приведенного момента инерции.
Определение значений приведенной силы и приведенного момента представлено в задаче 5.6.
В ы в о д. Приведенная масса равна 20,68 кг, а приведенный момент инерции составляет 0,4312 кг м2 .
Задача 5.16. Из условия задачи 5.7 найти приведенную массу и приведенный момент инерции, а также построить динамическую модель криво- шипно-ползунного механизма. Данные для построения кинематической схемы и плана скоростей взять из задачи 3.7, для составления расчетной схемы – из задач 4.6 и 4.23, а для построения динамической модели – из задачи 5.7.
Задача 5.17. Из условия задачи 5.8 найти приведенную массу и приведенный момент инерции, а также построить динамическую модель шарнирного механизма. Данные для построения кинематической схемы и плана скоростей взять из задачи 3.8, для составления расчетной схемы – из задач 4.7 и 4.24, а для построения динамической модели – из задачи 5.8.
Задача 5.18. Из условия задачи 5.9 найти приведенную массу и приведенный момент инерции, а также построить динамическую модель плоского рычажного механизма. Данные для построения кинематической схемы и плана скоростей взять из задачи 3.9, для составления расчетной схемы – из задач 4.8 и 4.25, а для построения динамической модели – из задачи 5.9.
Теория механизмов и машин. Практикум |
-131- |