

Ю.А. Никитин
Курс СТУ. Тема 3
Понятие об обратной связи
Практически ни одна телекоммуникационная система не обходится без цепей обратной связи – и на уровне элементарных узлов, и на уровне устройств, и на уровне подсистем. Обратную связь, в том или ином виде, вводят и для стабилизации параметров (ООС), и для генерации колебаний (ПОС), и для формирования частотных характеристик (фильтрации), и для модуляции – демодуляции при формировании и преобразовании информационных потоков. Поэтому знание основ теории САР является одним из важных моментов в подготовке современных специалистов телекоммуникаций.
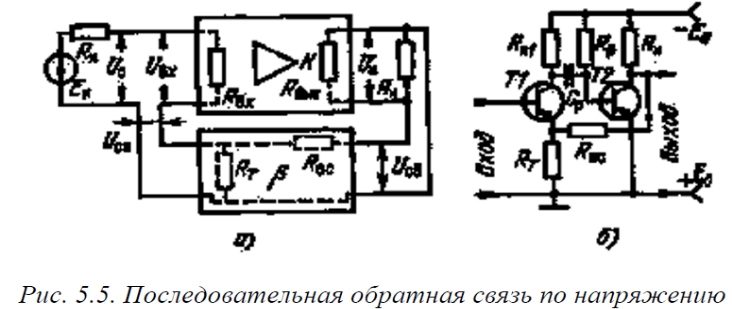
Заметим, что двухкаскадный усилитель можно охватить как минимум тремя обратными связями, трехкаскадный – пятью ООС и т.д. – рис.3.1.




3.1 Математическое описание элементов
На практике широко используют представление элементов САР в виде их передаточных функции, которые являются специфической записью линейных дифференциальных уравнений и позволяют давать математическое описание систем в виде наглядных структурных схем. Понятие о передаточных функциях и их определение основывается на преобразовании Лапласа.
Временные и частотные характеристики, с помощью которых описывают поведение элементов и систем в переходных и установившихся режимах, используют и при анализе, и при синтезе САР. Эти характеристики не учитывают физическую природу объектов, а обращают внимание только на их динамические свойства. Другими словами, в теории САР рассматривают математические модели элементов структуры – динамические звенья.
Передаточные функции, структурные схемы, временные и частотные характеристики, а также типовые динамические звенья составляют основу того математического аппарата, который используют в теории автоматического регулирования.
В основе всех перечисленных понятий лежит описание динамических свойств элементов и систем дифференциальными уравнениями. Однако, эти понятия и этот математический аппарат позволяют проводить анализ и синтез САР без интегрирования дифференциальных уравнений и непосредственного исследования их решений.
Переходный процесс системы можно определить при помощи дифференциальных уравнений отдельных ее элементов или всей системы. В общем случае такое уравнение нелинейно. Для аналитического решения задачи в общем виде целесообразно заменить нелинейное дифференциальное уравнение линейным. Такую операцию называют линеаризацией.
Основой линеаризации уравнений является выдвинутое И. А. Вышнеградским предположение, что в течение всего процесса регулирования имеют место достаточно малые отклонения всех изменяющихся переменных от их установившихся значений. Вводя в нелинейные уравнения процесса управления не абсолютные значения переменных, а их отклонения, можно перейти к линейным уравнениям в приращениях.
Линеаризация уравнений и их запись в приращениях позволяют получить нулевые начальные условия. Почему – потому, что в окрестностях точки устойчивого равновесия.
В общем случае для приведения уравнений к форме в конечных приращениях используют формулу разложения аналитической функции в ряд Тейлора; также считают, что движение происходит в пределах малых отклонений от установившегося состояния, а производные имеют единственное и конечное значение, отличное от нуля.
Для непрерывной функции Y = f(x), имеющей n непрерывных производных в окрестностях точки устойчивого равновесия
 ,
,
формула Тейлора имеет вид:
 (3.1)
(3.1)
Членами ряда второго и выше порядка малости обычно пренебрегают. Далее вычитают значения функции для установившегося состояния и вместо (3.1) получают
 (3.2)
(3.2)
где
 – производная функции по входной
переменной, которую определяют, как
тангенс угла наклона α
статической
характеристики элемента в заданной
точке (A,
X0)
– рис.3.2.
– производная функции по входной
переменной, которую определяют, как
тангенс угла наклона α
статической
характеристики элемента в заданной
точке (A,
X0)
– рис.3.2.

Формула (3.2) представляет собой уравнение в приращениях; ее можно применять к линейным и нелинейным аналитическим функциям.
Линеаризация нелинейной функции методом малых отклонений означает замену кривой в точке устойчивого равновесия касательной к этой кривой.
При
записи линейного дифференциального
уравнения искомую функцию времени и ее
производные принято записывать в левой
части, а входные величины (заданные
функции времени) в правой. При записи
уравнения обычно используют оператор
дифференцирования p
или
 ,
который формально считают алгебраической
величиной. При этом
,
который формально считают алгебраической
величиной. При этом ,
…
,
… .
.
Для примера, запишем линейное дифференциальное уравнение второго порядка следующим образом


 (3.3)
(3.3)
 ,
,
где



– линейные дифференциальные операторы.
Если к однокоординатной САР приложено задающее воздействие g = g(t) и возмущение (помеха) f = f(t), то ее уравнение в общем случае можно записать в виде:
 ,
(3.4)
,
(3.4)
где



–
линейные
дифференциальные операторы с постоянными
коэффициентами, причем

Для линейного дифференциального уравнения с постоянными коэффициентами выполняется чрезвычайно важный принцип суперпозиции. Он заключается в том, что каждая входная величина (заданная функция времени) создает составляющую выходной величины (искомой функции времени) независимо
- от наличия и характера изменения других входных величин;
- от начальных условий.
При этом начальные условия вызывают переходный процесс, который не зависит от входных величин.
Начальными условиями уравнения n-го порядка называют значения выходной величины (искомой функции времени) и ее производных до (n - 1) включительно в начальный момент времени.
Принцип суперпозиции, следовательно, означает, что решение y = y(t) уравнения (3.4) равно сумме трех составляющих

где
 есть решения неоднородных уравнений
есть решения неоднородных уравнений и
и при нулевых начальных условиях, а
при нулевых начальных условиях, а есть решение однородного уравнения
есть решение однородного уравнения
 (3.5)
(3.5)
при
заданных начальных условиях. Последнюю
составляющую
 называют свободной составляющей и
определяют значениями корней
характеристического уравнения
называют свободной составляющей и
определяют значениями корней
характеристического уравнения
 ,
(3.6)
,
(3.6)
где s – комплексная величина.
Общее решение однородного уравнения (3.5) представляет собой сумму частных решений, которые зависят от корней характеристического уравнения (3.6):
каждому
вещественному корню
 соответствует частное решение вида
соответствует частное решение вида
 ;
(3.7)
;
(3.7)
каждому
вещественному корню
 кратности ν соответствует ν частных
решений
кратности ν соответствует ν частных
решений
 …+
…+ ;
(3.8)
;
(3.8)
каждой
паре сопряженных комплексных корней
 и
и соответствуют два частных решения
соответствуют два частных решения
 (3.9)
(3.9)
каждой
паре сопряженных комплексных корней
 и
и кратности μ соответствует 2μ частных
решений
кратности μ соответствует 2μ частных
решений
 (3.10)
(3.10)
При инженерных расчетах линейные дифференциальные уравнения удобнее всего решать операторным методом.