

2. Перечислите стадии процесса осуществления роботизации. Расскажите о стадии оценки проекта.
В случае разработки несложных проектов роботизации или повторном использовании ранее выполненных типовых проектов допускается проектирование в одну стадию с разработкой технорабочего проекта.
Монтаж промышленных роботов, роботизированных технологических комплексов и систем выполняется по рабочим чертежам либо по чертежам технорабочего проекта.
В состав проекта входят: структурные и функциональные схемы; принципиальные электрические, гидравлические, пневматические схемы управления, контроля, сигнализации, блокировки и питания; общие виды пультов управления, шкафов электрооборудования, пневмогидрооборудования и их схемы соединений; монтажные чертежи установки ПР, технологического оборудования, околороботного оборудования (загрузочных устройств, накопителей и т.п.), шкафов и пультов, а также чертежи трасс; схемы подключений входящих в состав проекта сборочных единиц; общие виды нестандартного околороботного оборудования и нетиповых конструкций; пояснительная записка; спецификация и заявочные ведомости основных монтажных материалов; эксплуатационная документация.
3. Перечислите стадии процесса осуществления роботизации. Расскажите о стадии планирования.
В случае разработки несложных проектов роботизации или повторном использовании ранее выполненных типовых проектов допускается проектирование в одну стадию с разработкой технорабочего проекта.
Монтаж промышленных роботов, роботизированных технологических комплексов и систем выполняется по рабочим чертежам либо по чертежам технорабочего проекта.
В состав проекта входят: структурные и функциональные схемы; принципиальные электрические, гидравлические, пневматические схемы управления, контроля, сигнализации, блокировки и питания; общие виды пультов управления, шкафов электрооборудования, пневмогидрооборудования и их схемы соединений; монтажные чертежи установки ПР, технологического оборудования, околороботного оборудования (загрузочных устройств, накопителей и т.п.), шкафов и пультов, а также чертежи трасс; схемы подключений входящих в состав проекта сборочных единиц; общие виды нестандартного околороботного оборудования и нетиповых конструкций; пояснительная записка; спецификация и заявочные ведомости основных монтажных материалов; эксплуатационная документация.
7. Раскройте определение гибкой производственной системы.
Гибкие производственные системы (ГПС) — наиболее эффективное средство автоматизации серийного производства, позволяющее переходить с одного вида продукции на другой с минимальными затратами времени и труда.
ГПС позволяет снизить потребность в квалифицированных станочниках и станках, повысить качество продукции. Производительность станков с ЧПУ, входящих в ГПС, в 1,5—2 раза выше суммарной производительности такого же количества индивидуально работающих станков с ЧПУ.
Гибкая производственная система— это комплекс технологических средств, состоящих из одного-двух (не более) многоцелевых станков с ЧПУ или других металлорежущих станков с ЧПУ, оснащенных механизмами автоматической смены инструмента, автоматической смены заготовок и транспортирования их со склада до зоны обработки с помощью различных транспортных средств, например самоходных роботизированных тележек. Этот комплекс связан с единым математическим обеспечением, способствующим работе оборудования в автоматическом режиме с минимальным участием человека.
ГПС оснащены современными системами ЧПУ,управляющими перемещениями механизмов станка, инструментом, транспортом, си стемами загрузки — выгрузки. Такие системы ЧПУ имеют дисплеи, помогающие оператору увидеть отклонения в работе станка, мониторные устройства, обеспечивающие диагностирование режущего инструмента, контроль размеров обрабатываемых заготовок непосредственно на станке и т. д.
Действующие в настоящее время гибкие автоматические системы значительно различаются по уровню технических возможностей.
8. Нарисуйте схему и поясните построение робототехнических комплексов при загрузке технологического оборудования.
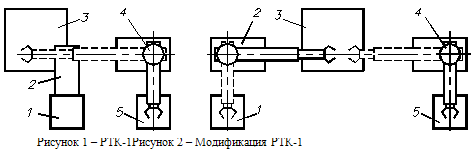
РТК первого типа можно реализовать в двух вариантах. В первом варианте (рис. 1) один робот 4 обслуживает одну единицу технологического оборудования 3 или одно рабочее место. Для подачи заготовки в зону захватного устройства ПР предлагается загрузочное устройство 5, а для разгрузки готовых деталей может быть использована конструкция, состоящая из специального склиза 2 и разгрузочного устройства 1.