

3.1. Сау температурой ферментатора
Объектом управления является биохимический процесс ферментации, связанный с жизнедеятельностью специализированной культуры микроорганизмов и протекающий в специальном устройстве – ферментаторе, в котором поддерживается определенный температурный режим. Цель управления заключается в стабилизации температуры среды ферментатора, наиболее благоприятной для роста и развития микроорганизмов. Наиболее ответственным с точки зрения кинетики процесса является момент запуска процесса ферментации и вывод объекта управления в установившийся режим с фиксированной температурой среды ферментатора, поскольку на данном этапе происходит массовый рост колонии микроорганизмов, сопровождающийся дополнительным тепловыделением, связанным с их жизнедеятельностью. Таким образом, при выводе ферментатора на установившийся температурный режим необходимо учитывать собственное тепловыделение питательной среды ферментатора.
Процесс размножения микроорганизмов в питательном растворе с ограниченными ресурсами описывается уравнением Ферхюльста:
dN dt = KN N max - N N max ,
где N – концентрация микроорганизмов в единице питательного раствора, N max – максимальная возможная концентрация микроорганизмов в единице питательного раствора при заданной концентрации питательных веществ и температурном режиме, K – коэффициент, отражающий скорость роста колонии и зависящий от совокупности факторов, определяющих скорость размножения микроорганизмов. Как правило, K в большей степени зависит от температуры и является функцией колоколообразного вида с максимумом в точке со значением температуры, наиболее благоприятной для размножения микроорганизмов. т.е. и при низких, и при высоких температурах развитие колонии существенно замедляется. Собственное тепловыделение колонии T 1 = k 1 N , где T 1 – избыточная температура, обусловленная жизнедеятельностью микроорганизмов, k 1 – коэффициент пропорциональности.
Отопление ферментатора осуществляется при помощи калорифера с теплоносителем, расход которого регулируется клапаном расхода с электроприводом. Постоянная времени развития колонии существенно больше постоянной времени тепловых переходных процессов. Однако, для того чтобы при регулировании температуры среды ферментатора не происходило резких температурных скачков, нежелательных для процесса биохимического синтеза, при помощи специфических технических решений (теплоизоляция, равномерное распределение тепла за счет введения множества тепловыделяющих элементов и т.п.) искусственно увеличивают время переходных процессов, протекающих между нагревательными элементами ферментатора и питательной средой и определяемых теплофизическими свойствами агрегата. В результате такого технического решения, объяснимого с точки зрения ограничений температурного градиента раствора ферментатора и продиктованного спецификой объекта управления, инерционностью тепловых процессов при нагреве ферментатора за счет подаваемого теплоносителя становится сравнимой со скоростью развития колонии микроорганизмов и измеряется часами. Таким образом, избыточная температура, вносимая калорифером, T 2 = k 2 p T кал p+1 u , где T 2 – избыточная температура, обусловленная жизнедеятельностью микроорганизмов, где k 2 – коэффициент усиления, u – управление электроприводом, меняющим угол поворота клапана расхода теплоносителя, T кал – искусственно увеличенная постоянная времени переходных тепловых процессов (не путать с обозначением температур T 1 T 2 T 3 T )
При постоянно поддерживаемой концентрации питательных веществ в ферментаторе N max = k 3 · K , где k 3 – коэффициент пропорциональности, т.е. максимальная концентрация определяется температурным режимом, поскольку K имеет максимальное значение при температуре T питательного раствора ферментатора, наиболее благоприятной для роста микроорганизмов. На температурный режим ферментатора возмущающее воздействие оказывает температура внешней среды T 3 .
Структурная схема традиционной системы управления температурой ферментатора представлена на рис.4.15.
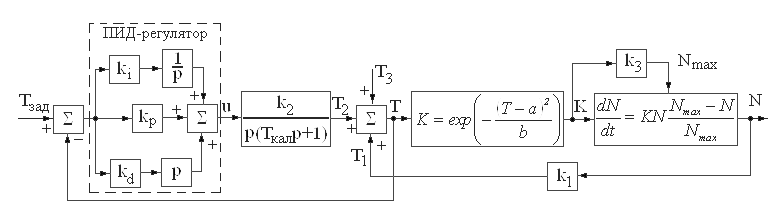
Рис. 4.15. Структурная схема САУ температурой ферментатора с ПИД-регулятором
Моделирование традиционной САУ при следующих параметрах объекта управления: ие оказывает температура внешней среды k i = 0,25 , k p = 0,2 , k d = 0,25 , k 1 = 10 -12 , k 2 = 1 , k 3 = 5⋅ 10 12 , T кал = 10 4 с -1 , a = 50 , b = 20 ; в случае пуска ферментатора с начальной температуры T = T 3 = 20 C о , до T = T зад = 50 C о ,соответствующей установившемуся режиму работы с максимальным показателем роста колонии микроорганизмов показывает, что при ПИД-регулировании в системе неизбежно присутствует перерегулирование (рис.4.16).
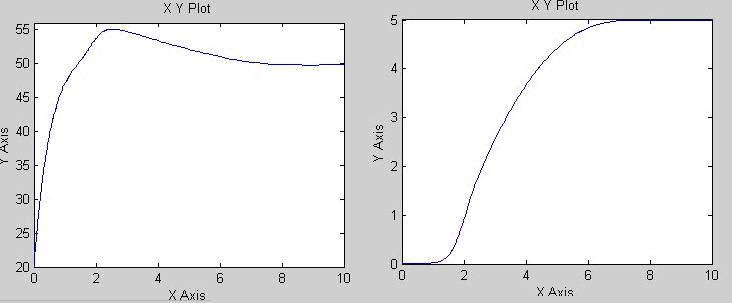
Рис. 4.16. Результаты моделирования динамики САУ с ПИД-регулятором; слева – температура ферментатора T , C o ; справа – концентрация N , 10 12 / см 3 ; t изм. в часах
Причем, в случае достаточно большого показателя k 1 собственного тепловыделения биохимического синтеза, невозможно найти такие коэффициенты ПИД-регулятора, при которых перерегулирование отсутствует. Это обусловлено тем, что САУ построена по принципу обратной связи по температуре ферментатора, и совершенно не учитывает внутреннее тепловыделение, происходящее в ферментаторе в результате жизнедеятельности микроорганизмов. С точки зрения регулятора, внутренне тепловыделение T 1 формально является внешней возмущающей помехой. Поэтому, при стабилизации температуры ферментатора T возникает парадоксальная ситуация: компенсируя влияние на тепловой баланс внутреннего тепловыделения, этой «якобы помехи», ПИД-регулятор провоцирует ее проявление, поскольку меняя температурный режим ферментатора, он опосредованно изменяет собственное тепловыделение процесса биохимического синтеза. Ситуация неразрешима традиционными методами теории управления, поскольку невозможно ввести обратную связь, учитывающую только внутренний приток тепла за счет собственного тепловыделения. Косвенно можно оценить это избыточное теплопоступление, зная концентрацию микроорганизмов в ферментаторе. Однако, более менее точную оценку N возможно получить только в результате лабораторных исследований, т.е. такая скорость получения информации приемлема только для оценки статического установившегося режима работы ферментатора, а для управления динамикой процесса нужен датчик, осуществляющий мгновенную оценку концентрации N . В качестве такого датчика может быть использовано устройство, оценивающее концентрацию микроорганизмов по ряду косвенных моментально измеряемых величин: как-то прозрачность раствора (оптические датчики), концентрация продуктов жизнедеятельности (датчики химического состава) и т.п. Однако, ввиду специфики микробиологических процессов, такой датчик будет иметь существенную погрешность, поэтому полученную оценку N нельзя использовать в качестве корректирующего сигнала при синтезе управления. Использование же традиционной системы с ПИД-регулятором и неизбежным перерегулированием не всегда приемлемо, поскольку превышение оптимальной температуры ферментации негативно сказывается на качестве конечного продукта процесса ферментации; в противном случае с перерегулированием вполне можно было бы мириться: на динамике роста колонии микроорганизмов оно сказывается несущественно.
Тем не менее, возможно построить систему управления, оперирующую при стабилизации температурного режима ферментатора такой весьма приблизительной оценкой концентрации N . Для нечеткой системы управления достаточно будет интерпретировать концентрацию микроорганизмов в понятиях «мало», «средне», «много», что вполне возможно даже при достаточно низкой точности измерения N . Структурная схема такой нечеткой САУ представлена на рис.4.17.
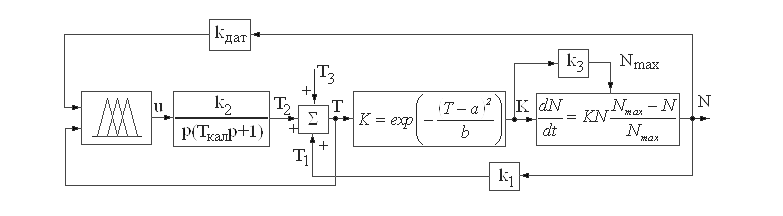
Рис 4.17. Структурная схема САУ температурой ферментатора с fuzzy-регулятором
Отсутствие ограничений по входам нечеткого контроллера объясняется тем, что функции принадлежности лингвистических переменных изначально задаются в пределах физически возможных значений входных величин: температура ферментатора на интервале ( 20 о C; 80 о C ) , концентрация микроорганизмов на интервале ( 0; 1 ) с учетом коэффициента передачи датчика концентрации k дат = 0,2⋅10 -12 и пределом роста концентрации N max = 5⋅10 12 при оптимальной температуре ферментации T = 50 o C для заданных ранее параметров модели объекта управления. Сигнал задания требуемого значения температуры ферментации отсутствует, поскольку ее значение задается неявно при формулировке базы продукционных правил системы нечеткого вывода и определении термов лингвистической переменной «температура ферментатора».
Лингвистическая переменная «температура ферментатора», соответствующая входу нечеткого контроллера T , задается термами BLnorm-«намного ниже нормы», Lnorm-«ниже нормы», norm-«норма», Hnorm-«выше нормы», BHnorm-«намного выше нормы», причем мода нечеткого множества, определяющего понятие «норма» соответствует оптимальной температуре ферментации – в рассматриваемом примере 50 o C (см.рис.4.18(а)).
Лингвистическая переменная «концентрация микроорганизмов», соответствующая входу нечеткого контроллера N и измеряемая косвенно при помощи датчика концентрации k дат , задается термами low-«низкая», middle-«средняя», high-«высокая», причем соответствующие нечеткие множества имеют очень большой индекс нечеткости (см.рис.4.18(б)), поскольку, как уже было отмечено ранее, датчик концентрации микроорганизмов имеет существенную погрешность, связанную со спецификой методов измерения и контроля данной величины, и дает весьма приблизительную оценку концентрации микроорганизмов в среде ферментатора.
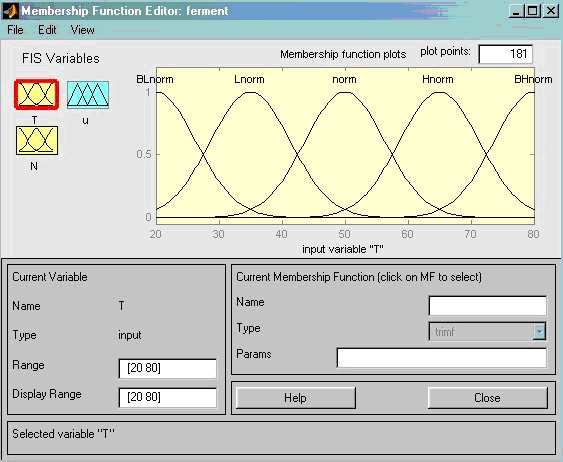
Рис.4.18 (а). Функции принадлежностей лингвистических переменных, определяющих нечеткое представление температуры ферментации в качестве входного сигнала нечеткого контроллера
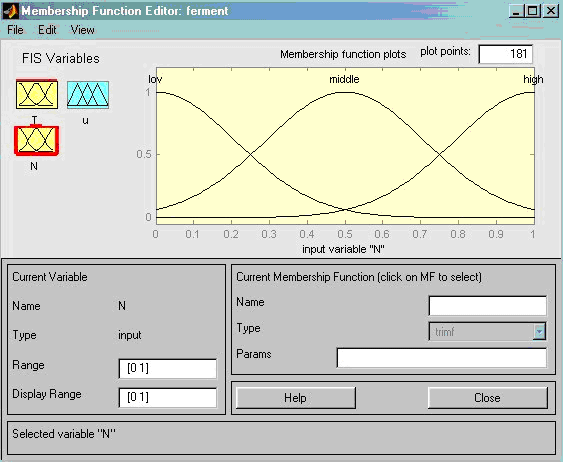
Рис.4.18 (б). Функции принадлежностей лингвистических переменных, определяющих нечеткое представление концентрации микроорганизмов в качестве входного сигнала нечеткого контроллера
Лингвистическая переменная «приращение угла поворота клапана», соответствующая выходу нечеткого контроллера , задается термами NB-«отрицательное большое», NS-«отрицательное малое», Z-«нулевое», PS-«положительное малое», PB-«положительное большое» на конечном интервале, соответствующем физическим ограничениям на входной сигнал управления клапаном подачи теплоносителя в отопительную систему ферментатора (рис.4.19).

Рис.4.19. Функции принадлежностей лингвистических переменных, определяющих нечеткое представление приращения угла поворота клапана в качестве выходного сигнала нечеткого контроллера.
Лингвистические правила, которыми следует руководствоваться при выборе нечеткого значения управления клапаном подачи теплоносителя в систему отопления ферментатора и которыми, основываясь на опыте эксплуатации объекта управления, руководствуется персонал при запуске ферментатора и его выводе на установившийся режим работы выглядят следующим образом:
ЕСЛИ «температура ферментатора» «намного выше нормы» ТО «приращение угла поворота клапана» «отрицательное большое»;
ЕСЛИ «температура ферментатора» «выше нормы» ТО «приращение угла поворота клапана» «отрицательное малое»;
ЕСЛИ «температура ферментатора» «ниже нормы» ТО «приращение угла поворота клапана» «положительное малое»;
ЕСЛИ «температура ферментатора» «намного ниже нормы» ТО «приращение угла поворота клапана» «положительное большое»;
ЕСЛИ «температура ферментатора» «норма» И «концентрация микроорганизмов» «низкая»ТО «приращение угла поворота клапана» «нулевое»;
ЕСЛИ «температура ферментатора» «норма» И «концентрация микроорганизмов» «средняя» ТО «приращение угла поворота клапана» «отрицательное большое»;
ЕСЛИ «температура ферментатора» «норма» И «концентрация микроорганизмов» «низкая»ТО «приращение угла поворота клапана» «нулевое».
Очевидно, что база нечетких правил определена не полностью на всем пространстве значений нечетких переменных, поэтому при программировании нечеткого контроллера соответствующая часть правил не вводится (рис.4.20).
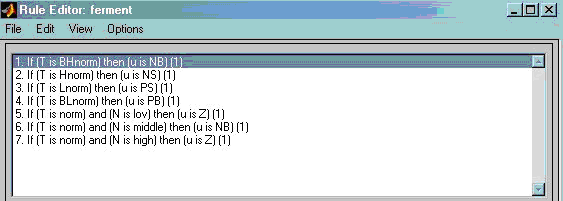
Рис. 4.20. База правил нечеткого контроллера
Результаты моделирования работы нечеткой САУ температурой ферментатора с контроллером Мамдани представлены на рис.4.21.
Сравнительный анализ динамики САУ температурой ферментатора с ПИД-регулятором и с нечетким регулятором показывает, что при реализации fuzzy-управления удается на 15% уменьшить время набора ферментатором максимальной концентрации микроорганизмов и на 5% снизить перерегулирование температуры ферментатора. Эффективность управления повышается за счет того, что нечеткий регулятор прекращает увеличивать подачу теплоносителя раньше, чем это делает ПИД-регулятор, поскольку кроме сигнала ошибки между заданной и фактической температурой ферментатора оперирует еще и оценкой количества микроорганизмов в ферментаторе. Фактически нечеткая САУ ведет себя подобно человеку: оценивая текущую микробиологическую ситуацию в растворе, прекращает нагревание ферментатора заблаговременно, рассчитывая на то, что недобранное объектом управления тепло будет получено за счет собственного тепловыделения биохимической реакции и, таким образом, требуемой температуры среды удастся достичь без перерегулирования и перегрева рабочего пространства ферментатора.
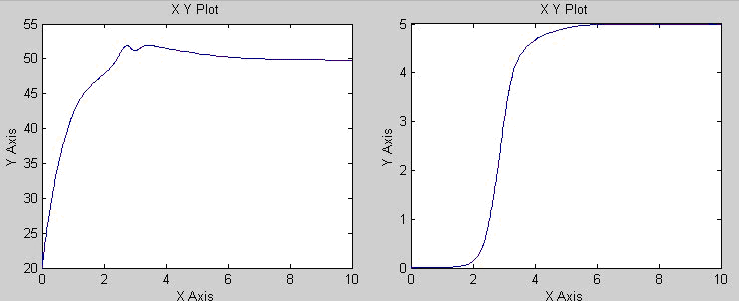
Результаты моделирования работы нечеткой САУ; слева -T , C o ; справа -N , 10 12 / см 3 ; t изм. в часах
Приведенный пример наиболее точно отражает идеологию применения нечетких САУ: использование автоматического fuzzy-управления в случае, когда в принципе невозможен синтез управления методами ТАУ, но существует опыт эксплуатации объекта, позволяющий сформулировать в лингвистической форме правила управления, приводящие к приемлемому результату.
Патентный Поиск
|
Название патента |
Автор(ы) |
Правообладатель |
Номер регистрации (свидетельства) |
Приоритеты |
Аннотация |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
Система автоматического управления процессом аэрации при ферментации органического сырья |
Тумано И.П., Лысов В.Л., Буробин В.А., Ковалев Н.Г., Малинин Б.М. |
Всероссийский научно-исследовательский институт сельскохозяйственного использования мелиорированных земель |
2136760 |
Подача заявки: 31.03.1998 Публикация: 10.09.1999 |
Изобретение относится к микробиологической промышленности и может быть использовано в сельском хозяйстве для управления процессом ферментации органического сырья. Технический результат заключается в расширении функциональных возможностей системы управления аэрацией при ферментации органического сырья. Система автоматического управления процессом аэрации при ферментации органического сырья содержит ферментер с исходным сырьем, воздуходувку и контур регулирования подачи воздуха на аэрацию. |
|
Способ производства этанола из целлюлозосодержащих отходов (варианты) и способ получения глюкозы из целлюлозосодержащих отходов |
Чиффэло Роджер Лайтсей Джордж Р. |
Кэнтроулд Инвайерэнментл Систэмс Копэрейшн |
2159816 |
Подача заявки: 11.04.1998 Публикация: 10.09.1998 |
Изобретение относится к переработке отходов. Способ производства этанола предусматривает ферментацию, сортировку отходов, измельчение целлюлозного компонента, проваривание, коррекцию рН сбраживаемой массы перед ферментацией с последующим выделением этанола. |
Список литературы
Поспелов Д.А. Ситуационное управление: теория и практика.–М.:Наука, 1986.–288 с.
Нечеткие множества в моделях управления и искусственного интеллекта / под. ред. Д.А.Поспелова.–М.:Наука, 1986.–312с.
Алиев Р.А., Абдикеев Н.М., Шахназаров М.М. Производственные системы с искусственным интеллектом.–М.:Радио и связь, 1990.–264с.
Алиев Р.А., Церковный А.Э., Мамедов Г.А. Управление производством при нечеткой исходной информации.–М.:Энергоатомиздат, 1991.–240 с.
Кафаров В.В., Дорохов И.Н., Марков Е.П. Системный анализ процессов химической технологии. –М.:Наука, 1986.–360с.
Искусственный интеллект. Применение в интегрированных производственных системах. / под.ред. Э. Кьюсака: Пер. с англ. –М.: Машиностроение, 1991.–544с.
Пивкин В.Я., Бакулин В.П., Кореньков Д.И. Нечеткие множества в системах управления. –Новосибирск: изд-во НГУ, 1998.–75 с.
Подлесный Н.И., Рубанов В.Г. Элементы систем автоматического управления и контроля. –Киев: Выща школа, 1991.–461с.
Захаров В.Н., Ульянов С.В. Нечеткие модели интеллектуальных промышленных регуляторов и систем управления: Эволюция и принципы построения // Известия РАН: Техническая кибернетика. –1993. –№4. –С.189-205.
Представление и использование знаний. / под.ред. Х.Уэно: Пер. с япон. –М.: Мир, 1989. –220 с.
Осуга С. Обработка знаний: Пер. с япон. –М.: Мир, 1989. –293 с.
Бочарников В.П. Fuzzy-технология: математические основы, практика моделирования в экономике. – С.Пб: Наука РАН, 2001. – 328 с.
Поспелов Д.А. Моделирование рассуждений. Опыт анализа мыслительных актов. –М.:Радио и связь, 1989.–184с.
Кандрашина Е.Ю., Литвинцева Л.В., Поспелов Д.А. Представление знаний о времени и пространстве в интеллектуальных системах. –М.:Наука, 1989.–328 с.
Захаров В.И., Ульянов С.В. Нечеткие модели интеллектуальных промышленных регуляторов и систем управления: Научно- организационные, технико-экономические и прикладные аспекты // Изв. РАН.Техническая кибернетика. - 1992. - N 5. - C. 171-196.
Константинов И.С., Филатов А.Г., Касьянов Ю.В. Принципы построения интеллектуальных автоматизированных систем управления с нечетким регулированием на базе логико-лингвистических моделей представления знаний // Сборник трудов Седьмых Академических чтений РААСН “Современные проблемы строительного материаловедения”.-Белгород.-2001.С.154-158
Нечеткие множества и теория возможностей. Последние достижения / Под ред. Р.Р.Ягера.–М.: Радио и связь, 1986.– 408 с.
Борисов А.Н., Алексеев А.В., Меркурьева Г.В. и др. Обработка нечеткой информации в системах принятия решений.–М: Радио и связь, 1989.–304 с.
Литвак Б.Г. Экспертная информация. Методы получения и анализа.– М.: Радио и связь, 1982.–84 с.
Малышев Н.Г., Берштейн Л.С., Боженюк А.В. Нечеткие модели для экспертных систем в САПР.–М.: Энергоатомиздат, 1991.–136 с.
Larsen P.M. Industrial applications of fuzzy logic control // Int. J. Man-Machine Stud., 1980, V.12, №1.
Automatisierungtechnik: Immer mehr Hersteller setzen auf Fuzzy-Logik // Konstruktionspraxis, 1992. №12.
Saridis G.N. Analytical formulation of the principle of increasing precision with decreasing intelligence for intelligent machines // Automatics, 1989, V.25, №3.
Борисов А.Н., Крумберг О.А., Федоров И.П. Принятие решений на основе нечетких моделей.–Рига: Зинатне, 1990.–184 с.
Заде Л. Понятие лингвистической переменной и его примене-ние к принятию приближенных решений: Пер. с англ.–М.: Мир, 1976, 166 с.
Кофман А. Введение в теорию нечетких множеств: Пер. с франц.–М.: Радио и связь, 1982, 432 с.
Гвоздик А.А. Решение нечетких уравнений // Изв. РАН.Техническая кибернетика. - 1984. - N 5. - C. 176-183.
Шошин П.Б. Размытые числа как средство описания субъективных величин Решение нечетких уравнений //Статистические методы экспертных оценок. – М.: Наука, 1977, 250 с.
Dubois D., Prade H. Fuzzy real algebra: Some results // Fuzzy Sets a. Systems, 1989, V.2, №4.
Методы робастного, нейро-нечеткого и адаптивного управления / Под ред. Н.Д.Егупова.–М.: Издательство МГТУ им.Баумана, 2002.– 744 с.
Методы современной теории автоматического управления. Анализ и статистическая динамика систем автоматического управления / Под ред. Н.Д.Егупова.–М.: Издательство МГТУ им.Баумана, 2000.– 748 с.
Алтунин А.Е., Семухин М.В. Модели и алгоритмы принятия решений в нечетких условиях: Монография. – М.: Издательство Тюменского государственного университета, 2000. – 352 с.
Леоненков А.В. Нечеткое моделирование в среде Matlab и fuzzyTECH. – С.Пб.: BHV-Санкт-Петербург, 2003. – 736 с.
Сигеру Омату. Нейроуправление и его приложения. – М: ИПРЖР, 2000. – 272 с.
Терехов В.А. Нейросетевые системы управления. – М: Высшая школа, 2002. – 183 с.
Жукова С.В., Золотухин Ю.Н. Оптимизация параметров регуля-тора с использованием нечетких оценок и генетического подхода // Автометрия, 1998, № 3,с 12-17.
Пупков К.А., Коньков В.Г. Интеллектуальные системы. – М.: МГТУ им.Баумана, 2003. – 348 с.
Круглов В.И., Дли М.И., Голунов Р.Ю. Нечеткая логика и искусственные нейронные сети. – М.: Изд. Физ.мат.лит., 2002. – 312 с.
Лукас В.А. Основы fuzzy-управления. – Екатеринбург: УГГГА, 2000. – 62 с.
Захаров В.И., Ульянов С.В. Нечеткие модели интеллектуальных промышленных регуляторов и систем управления. Методология проектирования // Изв. РАН.Техническая кибернетика. - 1993. - N 5. - C. 197-220.
Искандеров Г.М. Нечеткие логические регуляторы в системе управления ферментатором // Сборник трудов научно технической конференции “Вузовская наука – Северо-Кавказскому региону”.-Ставрополь: СевКавГТУ.-2001.С.154-158
Рубин А.Б. Кинетика биологических процессов // Соросовский образовательный журнал. – 1998. - №10. – С.84-91.