

КУРСОВАЯ
Выпускная квалификационная работа содержит __ страниц, __ иллюстраций, таблицы, __ использованных источников.
ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ФЕРМЕНТЕРА
Целью работы является разработка программного приложения метрологической обработки экспериментальных данных.
Выполнен патентный анализ разработок в данной области.
Содержание
Введение………………………………………………………………..…..2
1.1 Основные понятия и термины в области метрологии…….…………5
1.1.1.Предпосылки создания интеллектуальных САУ…………………10
1.1.2.Информационные аспекты организации интеллектуальных САУ……………………………………………………………………………….17
1.1.3.Представление знаний в интеллектуальных системах…………..36
1.1.4. Методы описания нечетких знаний в интеллектуальных системах… ……………………………………………………………..47
1.1.5. Классификация интеллектуальных систем и структурная организация интеллектуальных САУ…………………………………………54
2.1. Нечеткие системы автоматического управления…………………..63
2.2. САУ с нечетким контроллером……………………………….…..69
3.1. САУ температурой ферментатора………………………………..70
4.1. Патентный Поиск……………………………………………………72
1.Литературный обзор
1.1 Основные понятия и термины в области метрологии
1.1.1.Предпосылки создания интеллектуальных сау
Традиционная теория автоматического управления при построении САУ базируется на следующей последовательности: формальное описание объекта управления и устройства управления → формирование критериев управления объектом → непосредственное проектирование САУ. Очевидно, что при поэтапной реализации описанной цепочки, характер возникающих подзадач и способов их решения всецело определялся выбранной структурой и видом формального описания объекта управления (ОУ) и устройства управления (УУ), образующих управляющую систему. Исторически сложилось так, что специалисты в области ТАУ основное внимание уделяли заключительному этапу, стремясь синтезировать закон управления, обеспечивающий приемлемый либо оптимальный режим работы ОУ. Оптимизация управления всегда была ключевой проблемой классической ТАУ, а при ее решении подразумевалось, что управляющая система описана в точных терминах формальной моделью, адекватно отражающей ее реальное состояние и процесс взаимодействия с внешней средой. Очевидно, что несложная модель управляющей системы вела к сравнительно простым методам решения задачи синтеза САУ данным объектом. Однако, повсеместное упрощение и линеаризация при представлении реальных технологических процессов зачастую приводило к созданию САУ, работоспособных только «на бумаге», т.е. в гипотетическом мире, который описывался выбранной формальной идеализированной моделью управляющей системы. Таким образом, модель управляющей системы является отправной точкой, от выбора которой зависит качество и работоспособность реальной САУ.
Модели управляющих систем создавались и модифицировались по мере ужесточения требований к САУ и усложнения технологических процессов. Зачастую, новый вид модели управляющей системы порождал новые критерии управления и новые методы синтеза САУ. Можно дать множество видов классификаций моделей управляющих систем: по функциональному назначению, по виду математического описания элементов системы, по характеру изменения физических величин и т.д.. Однако, поскольку нас интересует происхождение интеллектуальных САУ, отличительной чертой которых является реализация процедур взаимодействия с внешней средой, имитирующих в той или иной степени человеческие действия и мыслительные процессы, дадим упрощенную классификацию моделей управляющих систем именно с этой точки зрения. Исходя из характера информационного взаимодействия ОУ с внешней средой можно выделить три класса моделей управляющих систем, различаемых по объему используемой в процессе управления информации:
автономные – системы, не использующие непосредственной информации о реальных внешних возмущающих воздействиях, т.е. системы «замкнутые» относительно внешнего мира;
формализованные – системы, использующие информацию о реальных внешних возмущающих воздействиях в виде идеализированных формальных математических моделей, т.е. системы, существующие в техническом субъективном внешнем мире;
информационные – системы, использующие непосредственную информацию о реальных внешних возмущающих воздействиях, т.е. системы, существующие в реальном внешнем мире.
Системы первого типа – это системы, которые послужили основой становления теории автоматического управления (первоначально называвшейся теорией автоматического регулирования). Основной задачей, решаемой в то время, была задача автоматической стабилизации определенных физических величин Y – вектора выходных переменных ОУ, характеризующих режим работы объекта управления. В процессе функционирования систем автоматической стабилизации на человека-оператора (лицо, принимающее решение - ЛПР) возлагались функции определения вектора входных переменных G, задающих режим функционирования объекта (в данном случае в автоматическом режиме – это желаемые значения выходных переменных ОУ, так называемые уставки регуляторов). Поддержание желаемых значений выходных переменных осуществлялось путем подачи на вход ОУ вектора управляющих воздействий U , формируемых устройством управления(рис.1.1,1.2).
С одной стороны, решения ЛПР по определению уставок далеко не всегда являлись оптимальными и оперативными для технологического процесса. С другой стороны, именно участие имеющего опыт ЛПР в технологическом процессе позволяло в определенной степени нивелировать недостаточную адекватность модели управляющей системы. На самом деле такая САУ имеет опосредованную через ЛПР связь с окружающим миром, поскольку человек может воспринимать, анализировать и делать выводы, оперируя любой, в том числе и неформализованной информацией о состоянии как самой управляющей системы, так и процессов ее взаимодействия с реальным внешним миром. Однако, при работе в автоматическом режиме, без участия ЛПР, эта неявная связь утрачивается и управляющая система становится полностью автономной. К данному классу относятся разомкнутые системы (рис.1.1) и замкнутые системы с управлением по отклонению (рис.1.2).

Рис.1.1. Разомкнутая автономная система управления
В основном, САУ данного типа решали проблемы устойчивости и локального оптимального управления, т.е. обеспечения соответствия уставки регулятора и выхода ОУ согласно какому-либо критерию оптимальности (минимизации времени переходного процесса, минимизации максимального перерегулирования в системе, минимизации суммарного квадратичного отклонения уставки и выхода ОУ и т.п.).

Рис.1.2. Замкнутая автономная САУ
Расширение круга научно-технических задач, решаемых методами ТАУ, а также стремление к полной автоматизации управления технологическими процессами, породило следящие управляющие системы (системы, у которых вектор выходных переменных соответствует любым, заранее неизвестным изменениям вектора входных переменных) и системы программного управления (системы, у которых вектор входных переменных, представляет функцию времени, синтезируемую неким техническим устройством). Источником входных переменных управляющей системы в этом случае являлось не ЛПР, а техническая схема, технологический процесс, исследуемое физическое явление, принимаемый системой сигнал и т.п., т.е. непосредственно сам окружающий САУ реальный мир. Системы стабилизации также усложнялись, приобретали многоуровневую иерархическую структуру, вследствие чего источником вектора входных переменных в системах стабилизации все чаще становился не человек, а автоматическое устройство верхнего уровня. Таким образом утрачивалась возможность опосредованного получения и преобразования информации о реальном мире за счет оперативного участия в процессе управления человека – единственного на тот момент «устройства», способного воспринимать и адекватно реагировать на непредсказуемые возмущающие воздействия со стороны внешнего мира. Данного недостатка автономных систем в некоторой мере были лишены разработанные далее формализованные системы.
Системы второго типа – формализованные системы, используют в ходе своей работы информацию о внешнем мире, представленную в виде некоторого формального описания: детерминированного, стохастического, логического и т.п. Таким образом внешний мир для такой системы представляется в виде некой приближенной формализованной модели. К данному классу относятся разомкнутые и замкнутые системы стабилизации, слежения и программного управления с дополнительной явной и (или) скрытой коррекцией по возмущению (рис.1.3).
Явная коррекция подразумевает наличие датчиков возмущения и дополнительного корректирующего УУ. Под скрытой коррекцией по возмущению следует в данном случае понимать синтез УУ с учетом формального описания реальных возмущений и управляющих систем соответствующими моделями (стохастические САУ, системы оценивания, интервальные САУ, робастные САУ, САУ с нестабильными параметрами, инвариантные САУ).
Такая САУ уже учитывает влияние внешнего мира, но эффективность ее функционирования будет напрямую зависеть от близости формализованной модели взаимодействия управляющей системы и внешней среды к реальному его состоянию. Образно говоря, формализованные системы видят все окружающее в «кривом зеркале» количественного описания явлений, а далеко не все явления и процессы реального мира можно описать количественно с достаточной степенью точности. Поэтому для реальной оценки ситуации во внешнем мире и принятия адекватных решений по прежнему требуется участие ЛПР в процессе управления. Дальнейшее развитие идеи создания управляющих систем, способных приспосабливаться непосредственно к реальному внешнему миру без участия человека привело к построению информационных управляющих систем.
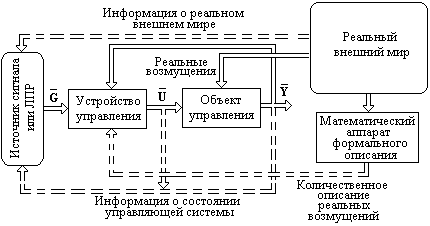
Рис.1.3. Замкнутая формализованная САУ (аналогичная разомкнутая САУ не имеет обратной связи между ОУ и УУ по вектору Y)
Системы третьего типа – информационные управляющие системы используют непосредственную информацию о внешнем мире и на основе получаемых данных автоматически приспосабливаются к изменению внешних условий и свойств ОУ. К данному классу систем относятся адаптивные САУ: самонастраивающиеся – с адаптацией путем изменения параметров УУ, самоорганизующиеся – с адаптацией путем изменения структуры УУ, самообучающиеся – с параметрической и (или) структурной адаптацией совмещенной с коррекцией алгоритмов подстройки. Как разновидность адаптивных САУ можно рассматривать устройства адаптивного оценивания и фильтрации (рис.1.4).
Областью применения информационных САУ является управление объектами, свойства или условия работы которых недостаточно формализованы или непостоянны. Степень «самостоятельности» таких САУ является наибольшей из всех трех типов управляющих систем. На первый взгляд данные системы уже обладают определенными признаками интеллектуальных САУ – способностью самостоятельно приспосабливаться к изменениям свойств ОУ и внешней среды. Однако, не стоит забывать, что алгоритм адаптации не может скомпенсировать все возможные воздействия со стороны внешнего мира, поскольку реальных ситуаций, возникающих при управлении объектом, может быть бесконечное множество. Информационные САУ, принадлежащие к классу саморазвивающихся адаптивных систем, будут обладать самым широким спектром приспособляемости, но в определенных и не бесконечных пределах, поскольку способов коррекции алгоритмов адаптации существует конечное множество, которое не может охватить все возможные ситуации в процессе взаимодействия управляющей системы с реальным миром. Поэтому было бы излишне самонадеянно оставить такую САУ «наедине» с объектом управления. Всегда возможно возникновение ситуации, с которой информационная САУ не справится. Поэтому периодически ЛПР должно корректировать адаптивные алгоритмы информационной САУ самостоятельно, опираясь на свой опыт и свои наблюдения.
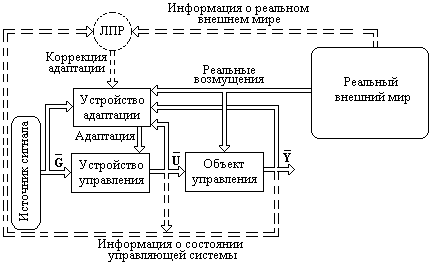
Рис.1.4. Информационная САУ
Таким образом, можно сказать, что развитие ТАУ шло по пути усложнения моделей управляющих систем с целью полного и адекватного описания процессов взаимодействия САУ и реального мира, что позволило бы наиболее эффективно построить процесс управления и максимально разгрузить участвующего в этом процессе человека, взяв на себя определенные функции по управлению объектом. Но даже наиболее совершенные информационные САУ не смогли в полной мере решить эти задачи. Особенно наглядно это проявилось в ходе построения систем управления сложными слабоструктурированными технологическими процессами. Это объясняется тем, что, в отличие от человека, все управляющие системы, созданные методами классической ТАУ, работают с данными (причем данными исключительно количественными, не позволяющими полно описать реальный мир), а не со знаниями. Напротив, человек не только оперирует данными (количественными, описываемыми традиционными математическими методами, и качественными, описываемыми средствами естественного языка), но и обладает базирующимися на их основе знаниями, т.е. может использовать данные для рассуждений и выводов. Это различие и делает человека бесконечно способным к интеллектуальной адаптации – «универсальным управляющим устройством» для любого объекта. Безусловно, в сравнении с любой современной САУ мозг человека имеет определенные преимущества, обусловленные его огромным функциональным диапазоном. Именно поэтому создание интеллектуальных САУ, реализующих элементы мыслительной деятельности человека, связанные с представлением и использованием знаний, позволяет получить системы управления качественно нового уровня – системы, которые, подобно человеку, существуют и работают в реальном мире, оперируя со знаниями об этом реальном мире.