

5.2. Идентификация объекта регулирования.
Для проведения параметрической оптимизации были сняты кривые разгона по каналам, задействованным в системе регулирования:
Кривая разгона по каналу Расход топлива- температура НРЧ (Рис.5.1):
Изменение
расхода топлива

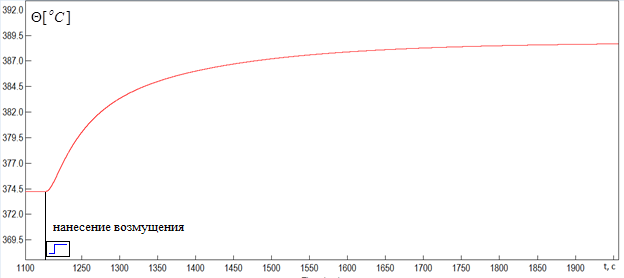
Рис.5.1
Кривая разгона по каналу Расход топлива- температура ВРЧ (Рис.5.2):
Изменение
расхода топлива

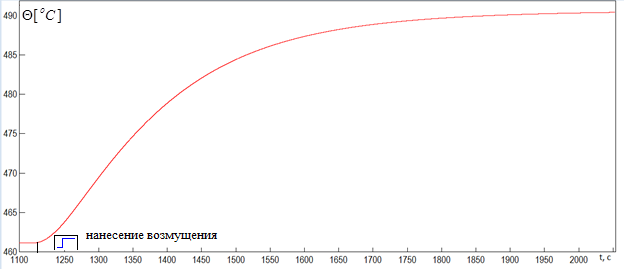
Рис.5.2
Кривая разгона по каналу Расход питательной воды- температура ВРЧ (Рис.5.3):
Изменение
расхода топлива

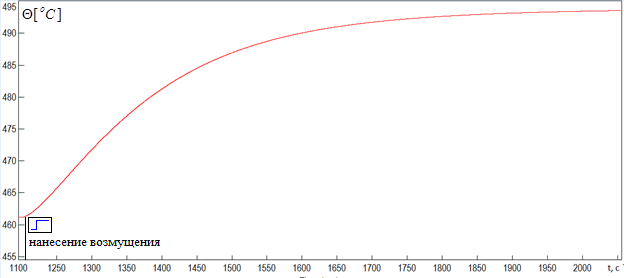
Рис. 5.3
Далее проводится идентификация объектов. Переходные характеристики получены из кривых разгона, путем выделения преобразования каждого значения по следующей формуле:
Вывод: на данном этапе было проведено исследование динамических свойств объекта и получены экспериментальные кривые разгона по каналам регулирования. Произведен анализ и обработка экспериментальных характеристик, получены переходные процессы, по которым в дальнейшем будет реализована идентификация динамического объекта управления.
5.3 Идентификация каналов динамического объекта управления. [2]
Задача идентификации – это задача определения по экспериментальным данным математической модели объекта управления.
Среди множества возможных подходов к решению данной задачи примем за основу традиционный для систем автоматического управления (САУ) непрерывными объектами метод получения модели в виде описания «вход-выход» в частотной области, т.е. в виде комплексной частотной характеристики (КЧХ) или передаточной функции.
Воспользуемся
алгоритмом:

Идентификацию каналов проводим с помощью ПМК «ТЕМП»
5.3.1 Идентификация канала расход топлива- температура за врч.
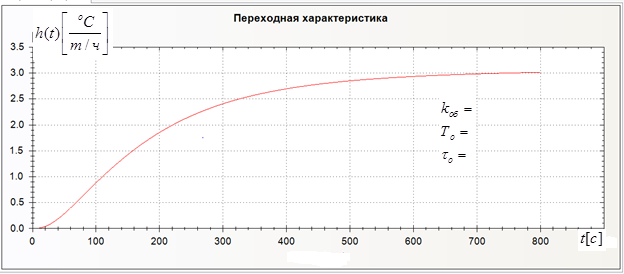
Рис. 5.4. Переходная характеристика по каналу расход топлива- температура за ВРЧ.

Рис. 5.5. КЧХ по каналу расход топлива- температура за ВРЧ.
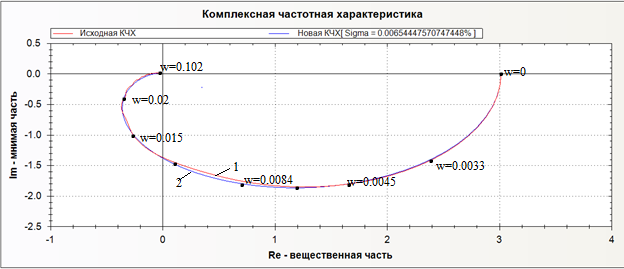
Рис. 5.6. Исходная (1) и аппроксимирующая (2) КЧХ по каналу расход топлива- температура за ВРЧ.
Полученная
передаточная функция:

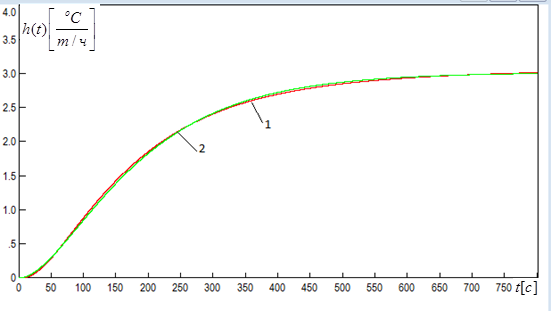
Рис. 5.7. Сравнение исходной (1) и аппроксимирующей (2) переходных характеристик по каналу расход топлива- температура за ВРЧ.
5.3.2 Идентификация канала расход топлива- температура за нрч.
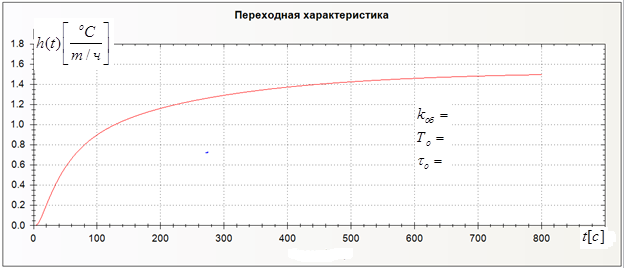
Рис. 5.8. Переходная характеристика по каналу расход топлива- температура за НРЧ.
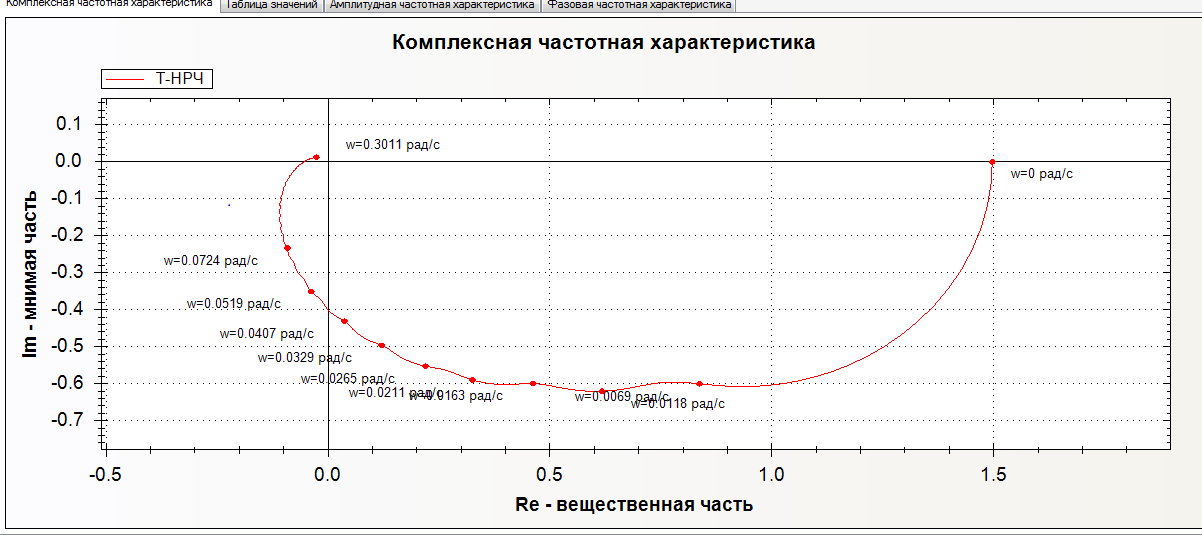
Рис. 5.9 КЧХ по каналу расход топлива- температура за НРЧ.
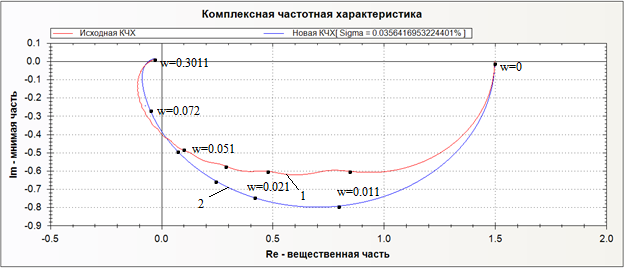
Рис. 5.10. Исходная (1) и аппроксимирующая (2) КЧХ по каналу расход топлива- температура за НРЧ.
Полученная
передаточная функция:

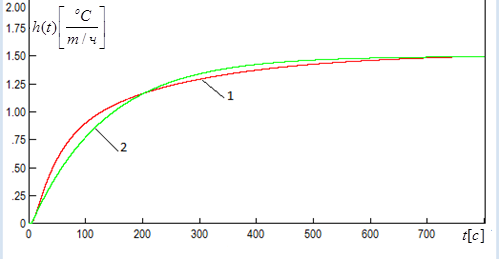
Рис. 5.11. Сравнение исходной (1) и аппроксимирующей (2) переходных характеристик по каналу расход топлива- температура за НРЧ.
5.3.3 Идентификация канала расход питательной воды - температура за врч.
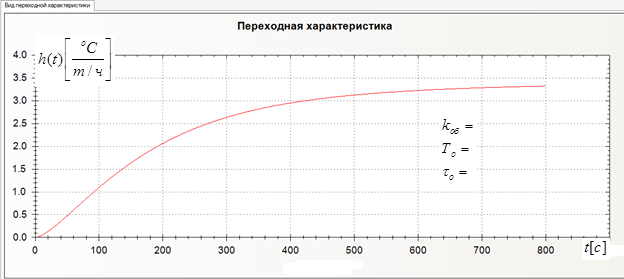
Рис. 5.12. Переходная характеристика по каналу расход питательной воды- температура за ВРЧ.

Рис. 5.13. КЧХ по каналу расход питательной воды- температура за ВРЧ.
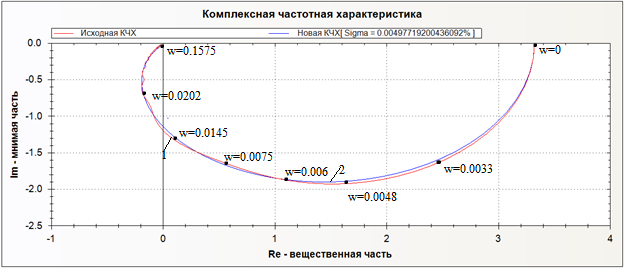
Рис. 5.14. Исходная (1) и аппроксимирующая (2) КЧХ по каналу расход питательной воды- температура за ВРЧ.
Полученная
передаточная функция:

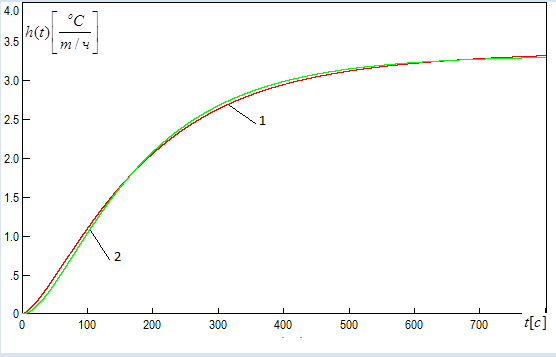
Рис. 5.15. Сравнение исходной (1) и аппроксимирующей (2) переходных характеристик по каналу расход питательной воды- температура за ВРЧ.
Вывод: на данном этапе мы произвели идентификацию динамического объекта управления и определили передаточные функции каналов регулирования.
5.4 Параметрическая оптимизация локальной системы управления
5.4.1 Расчет двухконтурной схемы с дифференциатором. [9]
Исходными данными для расчета являются полученные в предыдущей работе математические модели каналов объекта регулирования.

Рис.5.16 Схема двухконтурной АСР с дифференциатором
Эквивалентная
расчетная схема двухконтурной АСР с
дифференциатором, полученная на основе
исходной структуры (см. рис. 4.1.) представлена
на рис. 4.2. На схеме выделены два контура,
предназначенные для решения различных
задач: «внутренний» контур служит для
подавления высокочастотных возмущений
 (со стороны регулирующего органа);
«внешний» контур – для подавления
низкочастотных отклонений регулируемого
параметра от заданного значения (внешнеевозмущение
(со стороны регулирующего органа);
«внешний» контур – для подавления
низкочастотных отклонений регулируемого
параметра от заданного значения (внешнеевозмущение
 ).
).
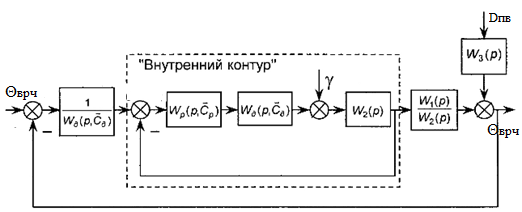
Рис. 5.17. Расчетная схема двухконтурной АСР с дифференциатором
Обозначения:
 передаточные
функции объекта управления;
передаточные
функции объекта управления;
 передаточная
функция регулятора;
передаточная
функция регулятора;
 –передаточная
функция дифференциатора;
–передаточная
функция дифференциатора;
 вектор
параметров настройки регулятора;
вектор
параметров настройки регулятора;
 вектор
параметров настройки дифференциатора.
вектор
параметров настройки дифференциатора.
В качестве закона регулирования, реализуемого регулятора, примем стандартный ПИ - регулятор:
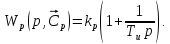
Дифференциатор реализуется в виде типового РД – звена с передаточной функцией
 .
.
Параметрический синтез двухконтурной АСР с дифференциатором выполним по упрощенной методике и сведем к последовательному расчету двух одноконтурных АСР: АСР "внутреннего" контура, который должен обеспечить в первую очередь наилучшую "отработку" внутренних возмущений γ АСР "внешнего" контура, который должен обеспечить наилучшую "отработку" внешних возмущений λ.