

1 Шаг. Параметрический синтез аср «внутреннего» контура.
В соответствии с применяемой упрощенной инженерной методикой параметрический синтез АСР "внутреннего" контура выполняется при разомкнутом "внешнем" контуре в предположении

В результате расчетная схема АСР "внутреннего" контура принимает вид одноконтурной системы (рис. 4.3).

Рис.5.18 Расчетная схема АСР "внутреннего" контура
Определение оптимальных параметров настройки регулятора с помощью ПМК «ТЕМП»

Рис 5.19 Линия запаса устойчивости Пи-регулятора


2 Шаг. Параметрический синтез аср «внешнего» контура
Параметрический синтез АСР «внешнего» контура выполняется согласно расчетной схеме (рис. 4.8), составленной на основании общей схемы (рис. 4.2).

Рис.5.20 Расчетная схема АСР "внешнего" контура с эквивалентным регулятором
В данной схеме передаточная функция “эквивалентного” ПИ – регулятора имеет вид:
Wэкв.р= =
=
При
выполнении допущения, что КрК11
т.е. резонансные частоты внутреннего и
внешнего контура должны быть различны
(wр.внутр.>>wр.внешн.),
тогда
 , то получаем, чтоWэкв.р=
, то получаем, чтоWэкв.р= =
= ,следовательно Кр.экв=
,следовательно Кр.экв= ,
Ти.экв=Т
,
Ти.экв=Т
Передаточная функция эквивалентного объекта управления определяется с учетом результатов расчета параметров настройки регулятора во внутреннем контуре:


Рис 5.21 Линия запаса устойчивости эквивалентного регулятора.
 ,
,
 [сек].
[сек].
 .
.
5.4.2 Расчет устройства компенсации внешнего возмущения.
Расчет идеального устройства компенсации проведем по следующей формуле:
![]()

Найдем передаточную функцию реального компенсатора, в качестве структуры выберем реально-дифференцирующее звено:
Оптимальные настройки реального компенсатора определим из условия наилучшего приближения КЧХ реального компенсатора к идеальному при нулевой и резонансной частотах замкнутого контура системы.
![]()
![]()
![]()
![]()
Параметры реального компенсатора

![]()

![]()
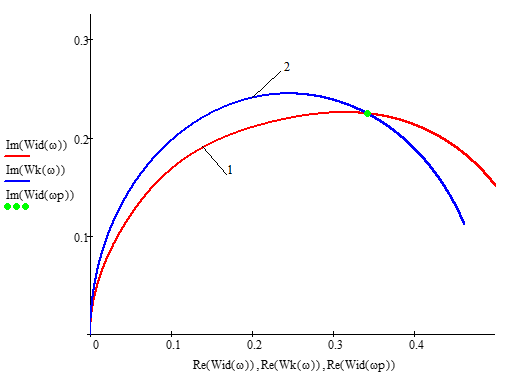
Рис. 5.22. КЧХ идеального (1) и реального (2) регуляторов до ωp.
Передаточная функция реального компенсатора:
![]()
После расчета параметров регуляторов была собрана имитационная модель в программном продукте «VisSim» Error: Reference source not found21.
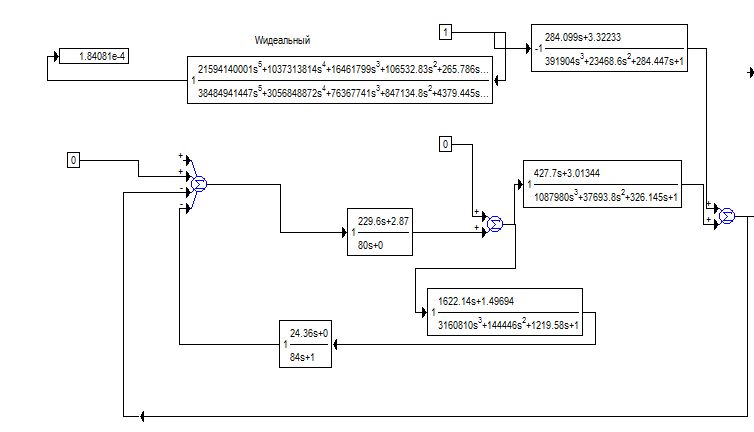
Рис. 5.23. Имитационная модель схемы ВТИ-2.
По имитационный модели были получены переходные характеристики при возмущении заданием Рис. 5.24, внутреннем возмущении Рис. 5.25, а также при внешнем возмущении Рис. 5.26 без устройства компенсации (1), с идеальным компенсатором (2) и
реальным компенсатором (3). Значения показателей качества регулирования свели в Табл. 4 .1.

Рис. 5.24. Переходная характеристика при возмущении заданием
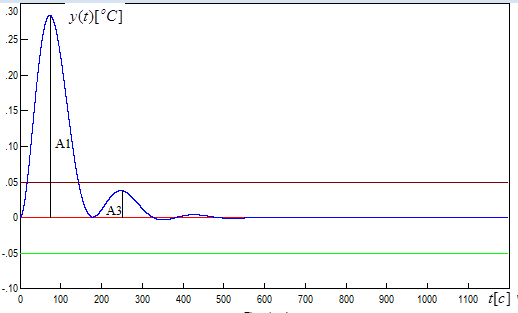
Рис. 5.25. Переходная характеристика при внутреннем возмущении

Рис. 5.26. Переходные характеристик при внешнем возмущении:
1 – без УК, 2 – с ИК, 3 – с РК
По переходной характеристике системы определили прямые и интегральные показатели качества с помощью программы «VisSim» и занесли их в таблицу 4.1:
Статическая ошибка
 (разность между требуемым и фактическим
установившимся значением регулируемой
координаты):
(разность между требуемым и фактическим
установившимся значением регулируемой
координаты):Динамическая ошибка
 (максимальное
по модулю отклонение регулируемой
координаты от установившегося значения
за период наблюдения процесса):
(максимальное
по модулю отклонение регулируемой
координаты от установившегося значения
за период наблюдения процесса):
Динамическая ошибка определяется по формуле:
 .
.
Степень затухания переходного процесса
 (характеризует
запас устойчивости системы и интенсивность
затухания колебательного процесса):
(характеризует
запас устойчивости системы и интенсивность
затухания колебательного процесса):
Степень затухания определяется по формуле:
 ,
,
где
 и
и – модули значений первого и третьего
отклонений регулируемой координаты от
установившегося значения соответственно.
– модули значений первого и третьего
отклонений регулируемой координаты от
установившегося значения соответственно.
Время регулирования
 (характеризует
быстродействие системы в аспекте
длительности отработки ей поступившего
возмущения):
(характеризует
быстродействие системы в аспекте
длительности отработки ей поступившего
возмущения):
Время регулирования определяется из условия:

 ,
,
приняли
 (зона чувствительности регулируемой
координаты).
(зона чувствительности регулируемой
координаты).
Время полувыбега
 (характеризует
быстродействие системы в аспекте
скорости реакции на поступившее
возмущение):
(характеризует
быстродействие системы в аспекте
скорости реакции на поступившее
возмущение):
Табл. 4.1. Показатели качества регулирования
|
Показатель качества регулирования |
Значение | ||
|
По заданию |
По Внутреннему возмущению |
Внешнее возмущение | |
|
Статическая ошибка δ, °C |
0 |
0 |
0 |
|
Динамическая ошибка A1, °C |
0,311 |
0,284 |
0,203 |
|
Время полувыбега tп, с |
93,1 |
72,6 |
132,1 |
|
Время регулирования tр, с |
277,2 |
144,2 |
356,5 |
|
Степень затухания ψ |
0,83 |
0,87 |
- |
Вывод: На данном этапе были рассчитаны оптимальные настройки регуляторов, входящих в двух контурную схему с дифференциатором, методом максимума амплитудно-частотных характеристик (МАЧХ). Также были найдены прямые показатели качества этой системы с оптимально настроенными регуляторами.