

Волны
.pdfконденсатора под действием электрического поля изменяет свою диэлектрическую проницаемость и тем самым приводит к изменению электроемкости конденсатора в зависимости от подаваемого в контур напряжения, т.е. к изменению собственной частоты колебаний контураω0 ) и т.д.
Все физические системы являются нелинейными системами. При малых амплитудах колебаний (при малых отклонениях от положения равновесия) физические системы можно считать линейными, колебания в них описываются одинаковыми дифференциальными уравнениями, что и позволяет построить общую теорию колебаний.
Нелинейные эффекты в физических системах обычно проявляются при увеличении амплитуды колебаний – это приводит к тому, что собственные колебания системы (осциллятора) уже не будут гармоническими, а их частота ω0 будет зависеть от амплитуды колебаний. Уравнения движения для них
являются нелинейными, а такие системы называют ангармоническими осцилляторами (см. § 5.5).
Действительно, например, для малых отклонений потенциального поля от
параболического вида |
(U (x) = kx2 |
/ 2 +αx3 +... ) |
дифференциальное уравнение |
||||||||||||||
колебаний будет иметь вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
dU |
|
2 |
= mx′′ |
x′′+ |
k |
3α |
|
2 |
|
, |
||||||
FX = − |
|
|
= −kx −3αx |
|
|
x + |
|
|
x |
|
= 0 |
||||||
dx |
|
m |
m |
|
|||||||||||||
|
x′′+ω02 x = 0, ω0 |
= |
k (x) |
, k (x)= k +3αx., |
|
|
|
|
|||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
Из записанного дифференциального уравнения видно, что коэффициент жесткости зависит от амплитуды колебаний, что приводит к зависимости угловой частоты свободных незатухающих колебаний системы от амплитуды колебанийω0 = ω0 (x) .
Для больших отклонений от линейного поведения зависимость ω0 (x)
усложняется, и поэтому усложняются уравнения описывающие колебания в системе.
Для нелинейных систем, в отличие от линейных, нарушается принцип суперпозиции, согласно которому результирующий эффект от сложного процесса воздействия представляет собой сумму эффектов, вызываемых каждым воздействием в отдельности, при условии, что последние взаимно не влияют друг на друга.
Изменение в нелинейных системах формы гармонического внешнего воздействия и нарушение принципа суперпозиции позволяют осуществлять с помощью таких систем генерирование и преобразование частоты электромагнитных колебаний – выпрямление, умножение частоты, модуляцию колебаний и т.д.
Резонанс в такой нелинейной системе будет отличаться тем, что в ходе раскачки осциллятора внешней силой величина расстройки ( ω−ω0 ) будет
изменяться, так как частота ω0 будет зависеть от амплитуды колебаний.
41

2.Автоколебательные системы. Рассмотрим подробнее один из примеров нелинейных систем - автоколебательные системы.
Преимуществом использования резонансных явлений является их экономичность и большая амплитуда колебаний. Недостатком является нестабильность работы системы, связанная с необходимостью с большой степенью точности поддерживать условие резонанса ( ω= ωp ), так как любые
отклонения частоты внешнего воздействия от резонансной частоты при узкой резонансной кривой резко изменяют амплитуду колебаний в системе (рис. 5.17,а, б).
Для того чтобы избежать таких нежелательных явлений, можно заставить саму систему поддерживать это резонансное условие, такая система является автоколебательной системой. Автоколебательная система относится к группе нелинейных колебательных систем, в которых происходит компенсация диссипативных потерь за счет притока энергии от внешнего постоянного источника. При этом система сама регулирует подвод энергии в систему, подавая ее в нужный момент времени в нужном количестве.
Автоколебательная система состоит из колебательной системы, источника энергии и клапана - устройства, которое регулирует подвод энергии в систему. Работой клапана управляет сама система с помощью обратной связи
(рис.5.24,а)
Рис. 5.24
В качестве примера автоколебательной системы можно привести систему, состоящую из груза, прикрепленного к двум пружинам и совершающего колебания на металлическом стержне (рис. 5.24,б). Источник постоянного тока с помощью электромагнита за каждый период колебаний совершает работу по увеличению кинетической энергии груза, восполняя потери энергии колебаний на преодоление сил сопротивления.
Это происходит следующим образом. При своем движении металлическая пластина, прикрепленная к грузу, касается контакта-прерывателя (он играет роль клапана), электрическая цепь замыкается и электромагнит притягивает к себе пластину, сообщая при этом дополнительную скорость грузу. Таким образом, в системе возникают незатухающие колебания на частоте ωР с большой амплитудой, которую можно регулировать, меняя положение контакта прерывателя.
Примерами автоколебательных систем могут служить духовые и смычковые инструменты, колебания голосовых связок при разговоре, механические часы.
42
Примером автоколебательной системы в природе является ядерный реактор, который проработал в течение 500 тысяч лет на урановом руднике в Африке 2,5 миллиарда лет тому назад. Для его работы необходимы были достаточное количество урана-235, который делится под действием медленных нейтронов, и замедлитель нейтронов – вода. В определенный момент времени вода скопилась в достаточном количестве и реактор заработал. Его работу поддерживала цепочка процессов, указанных на рис. 5.25:
↑ вода ↑ деление U −235 ↑ температура
↓температура ↓ деление U −235 ↓ вода
Рис. 5.25
Такая автоколебательная система работала до тех пор, пока не выгорело ядерное топливо. Здесь источником энергии является деление ядер U-235, клапаном служит изменение температуры воды, а колебательной системой является вода, уровень которой совершает колебания.
5.12. Параметрические колебания. Параметрический резонанс
Параметрические колебания – это колебания, происходящие в системе за счет периодического изменения тех параметров системы, которые определяют величину запасенной колебательной энергии. Так, например, можно возбудить параметрические колебания в колебательном контуре за счет периодического изменения электроемкости конденсатора или индуктивности катушки, параметрические колебания маятника за счет изменения длины его нити или массы груза.
Если обозначить через ω0 частоту собственных незатухающих колебаний в
системе, то параметрическое возбуждение колебаний в системе наступает в тех случаях, когда частота периодического изменения ωH параметра системы будет
удовлетворять условию
ωH = |
2ω0 |
, n =1, 2, 3.... |
(5.91) |
|
n |
||||
|
|
|
При таких значениях частоты ωH в системе будут возбуждаться собственные колебания системы на частоте ω0 . Наиболее благоприятной для возбуждения колебаний является частота ωH , равная 2ω0 , так как на этой
частоте совершает колебания энергия системы (потенциальная и кинетическая энергии, энергия электрического поля конденсатора и магнитного поля катушки индуктивности). При такой частоте колебания в системе будут наиболее интенсивными.
43

Поясним это на примере периодического изменения электроемкости конденсатора колебательного контура. Пусть момент времени t = 0 , заряд на обкладках конденсатора будет максимальным и в этот момент времени скачком (за время, малое по сравнению с периодом собственных колебаний) раздвигаются пластины конденсатора. Тогда энергия электрического поля
конденсатора |
будет |
увеличиваться, |
в контур |
поступает |
энергия: |
qmax = const, d ↑ W = qmax2 |
d (εε0 S ) . Через четверть периода колебаний |
(t = T / 4 ) |
|||
конденсатор |
будет разряжен ( q = 0 , WЭЛ |
= 0 ), вся |
энергия контура будет |
||
сосредоточена в катушке в виде энергии магнитного поля. Поэтому сближение обкладок конденсатора в этот момент времени не приводит к отводу энергии колебаний из контура.
Таким образом, за один период колебаний в контур два раза подводится энергия. Аналогичные процессы протекают при периодическом изменении индуктивности катушки контура.
Возникновение параметрических колебаний возможно и при отсутствии энергии колебаний в системе, это объясняется следующим образом. В любой колебательной системе вследствие воздействия на нее различных случайных факторов всегда существуют малые отклонения различных физических величин от их средних значений (их называют флуктуациями). Спектр частот таких флуктуаций будет непрерывным с малыми амплитудами отдельных гармоник (для напряжения на конденсаторе или индуктивности они составляют значения порядка микровольта). Периодическое изменение параметра системы на частоте, кратной ω0 , приводит к тому, что амплитуда гармоники с частотой ω0
будет все время увеличиваться за счет подвода энергии в систему извне и в системе возникают незатухающие колебания с большой амплитудой.
Такое возбуждение колебаний в системе получило название
параметрического резонанса.
Нарастание амплитуды колебаний при параметрическом резонансе ограничивается при достаточно больших амплитудах нелинейными эффектами. К ним можно отнести, например, возникновение зависимости активного сопротивления R от амплитуды силы тока в контуре (это приводит к увеличению потерь энергии на выделение джоулевой теплоты) или зависимости электроемкости конденсатора от напряжения (это приводит к изменению частоты щ0 собственных колебаний и в результате к увеличению
расстройки ( ωH −ω0 ) между частотами ωH и ω0 ). Равновесное значение
амплитуды колебаний наступает тогда, когда параметрическая накачка энергии в среднем за период компенсируется джоулевыми потерями.
Явление параметрического резонанса используется при работе малошумящих параметрических усилителей СВЧ-диапазона, в которых применяются параметрические полупроводниковые диоды с управляемой емкостью р-n перехода.
Примером параметрического резонанса в механической системе является маятник в виде груза массы m , подвешенного на нити, длину которой можно изменять (рис. 5.26,а).
44
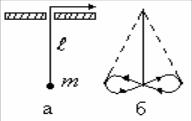
Если уменьшать длину в нижнем положении и увеличивать в крайних положениях, то работа внешней силы за один период колебаний будет положительной и амплитуда колебаний будет возрастать. Траектория движения груза при таких
колебаниях показана на рис. 5.26,б Раскачка качелей также обусловлена параметричес-
ким резонансом, когда эффективная длина маятника (положение центра тяжести) изменяется при приседаниях и вставаниях человека.
Рис. 5.26
5.13. Нормальные колебания (моды). Связанные колебательные системы
Под нормальными колебаниями (нормальными модами) понимают собственные (свободные) незатухающие гармонические колебания в
замкнутых линейных колебательных системах (в них отсутствуют как потери энергии, так и приток извне колебательной энергии).
Каждое нормальное колебание характеризуется определенным значением частоты. Эти частоты называются собственными частотами системы.
Вводится понятие степеней свободы системы. Под степенями свободы системы понимают число независимых параметров, описывающих возможные изменения состояния системы. Линейные колебательные системы (они представляют собой гармонические осцилляторы, такие как колебательный контур, пружинный маятник, математический маятник) являются системами с одной степенью свободы. Действительно, для описания их движения необходимо задать только один параметр. Например, для механической системы этим параметром является координата x , описывающая движение материальной точки относительно положения равновесия (другие координаты у
иz в этом случае не нужны). Для колебательного контура таким параметром будет заряд q на обкладках конденсатора (другие величины, такие как сила тока, напряжения на конденсаторе и на катушке, определяются из зависимости заряда q от времени t). Для линейных систем с одной степенью свободы существует только одно нормальное колебание, нормальная мода.
Связанные колебательные системы представляют собой системы с двумя
иболее степенями свободы, рассматриваемые как совокупность систем с одной степенью свободы, взаимодействующих между собой. Колебания, возникающие в связанных системах, называют связанными колебаниями.
Вдискретных связанных системах, состоящих из N связанных
гармонических осцилляторов (например, механических маятников, колебательных контуров), число нормальных колебаний равно N .
Примером связанных систем могут служить два колебательных контура, связанных между собой индуктивной связью (рис. 5.27,а). Колебания в одном контуре из-за наличия связи вызывают колебания в другом, т.е. происходит
45

переход энергии из одного контура в другой. Число нормальных колебаний для таких контуров равно двум.
Рис. 5.27
В линейных распределенных системах (струна, мембрана, резонатор) существует бесконечное, но счетное множество нормальных колебаний.
Произвольное свободное колебание системы может быть представлено в виде суперпозиции нормальных колебаний. При этом полная энергия движения распадается на сумму энергий отдельных нормальных колебаний.
Примером такой системы являются колебания струны, закрепленной на концах. Возбуждение в ней поперечных колебаний приводит к образованию стоячей волны, узлы которой приходятся на закрепленные концы (рис. 5.27,в).
На длине струны |
укладывается целое число полуволн |
|
||||||
|
= n λ , λn = |
2 |
νn = |
υ |
= |
υ |
n =ν1n , n=1,2,3,… . |
(5.92) |
|
n |
λ |
|
|||||
|
2 |
|
2 |
|
|
|||
|
|
|
|
n |
|
|
|
|
Все частоты νn |
представляют собой частоты нормальных колебаний струны, |
|||||||
частота ν1 , соответствующая n=1, называется основной частотой. Основную частоту можно изменить, уменьшая или увеличивая натяжение струны
ν1 = F (Sρ) , |
(5.93) |
где F – сила натяжения струны; ρ, S – плотность материала струны и площадь ее поперечного сечения соответственно.
Любое колебание струны можно представить в виде суммы ее нормальных колебаний. Таким образом, линейная распределенная система ведет себя как набор независимых гармонических осцилляторов.
Полученная формула (5.92) используется, в частности, для определения спектра частот нормальных колебаний кристаллической решетки, связанных с тепловыми колебаниями атомов.
Резонанс в системах с несколькими степенями свободы. При внешнем возбуждении системы нормальные колебания в значительной мере определяют ее резонансные свойства. Резонанс может возникнуть лишь в том случае, когда частота гармонического внешнего воздействия близка к одной из собственных частот системы, либо к их линейной комбинации, если внешнее воздействие меняет параметры системы (параметрический резонанс).
В линейном приближении собственные колебания этих систем представляют собой набор нормальных колебаний (мод). Если отклик системы представляет
46
собой суммарный отклик всех степеней свободы, то тогда резонансная кривая будет наложением резонансных кривых отдельных нормальных колебаний и может иметь сложный характер.
Так, в системе с двумя степенями свободы, ввиду того, что собственные колебания могут происходить с двумя различными частотами, резонанс наступает при совпадении частоты гармонического внешнего воздействия как с одной, так и с другой нормальной частотой системы. Подбором параметров нормальных колебаний можно создать резонансную кривую любой формы, что широко используется, например, в радиотехнике для создания фильтрации частот (рис. 5.27,б).
Наличие связи изменяет характер резонансных явлений в связанных системах по сравнению с одиночным контуром. В связанных системах резонанс наступает всякий раз, когда частота внешнего воздействия совпадает с одной из частот собственных колебаний всей системы, отличающихся от собственных частот отдельных контуров. Например, в связанных системах, состоящих из двух контуров, резонанс наступает на двух резонансных частотах. При этом для двух слабо взаимодействующих систем с близкими собственными частотами колебаний может происходить резонансная перекачка энергии из одной подсистемы в другую.
47

6.ТЕОРИЯ ВОЛНОВЫХ ПРОЦЕССОВ
6.1.Волны в упругой среде
6.1.1.Характеристики волновых процессов
Под упругой средой понимают среду, между частицами которой действуют упругие силы. Если какую-либо частицу среды заставить совершать колебания, то за счет действия упругих сил в колебательное движение приходят сначала ближайшие к ней соседние частицы, затем ближайшие к этим соседям частицы и т.д., в колебательный процесс вовлекаются все новые и новые частицы, говорят, что в среде распространяется упругая волна. Итак, под бегущей волной понимают процесс распространения колебаний в среде. Этот процесс сопровождается переносом энергии от источника колебаний, причем переноса частиц в направлении движения волны не происходит, они совершают колебания около своих положений равновесия.
Нужно отметить, что под частицей среды понимают не отдельную молекулу, а совокупность большого числа молекул, обладающих примерно одинаковыми свойствами (одинаковыми смещениями от своих положений равновесия, одинаковыми скоростями и т.д.). Размеры частиц должны быть достаточно малыми, значительно меньше возмущений, возникающих в среде, в частности, значительно меньше длины волны, распространяющейся в среде. Такие частицы препятствуют различным деформациям и, таким образом, среда проявляет упругие свойства. Молекулярное строение среды при этом не рассматривается, она считается сплошной.
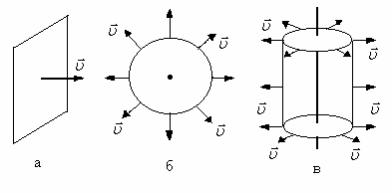
Различают продольные и поперечные волны. В продольной волне частицы среды совершают колебания вдоль вектора скорости распространения волны, а в поперечной волне – перпендикулярно к нему (рис. 6.1,а).
Рис. 6.1
Продольные волны связаны с деформациями сжатия и растяжения малых объемов среды (рис. 6.1,а), и поэтому они распространяются во всех средах. В отличие от продольных волн поперечные волны связаны с деформацией сдвига (рис. 6.1,б), поэтому они распространяются только в твердых телах, так как для жидкостей или газов такая деформация отсутствует. Отметим, что кроме волн в упругой среде также выделяют волны на поверхности жидкости, здесь частицы среды совершают сложные колебания, включающие в себя и поперечные и продольные движения.
48

Введем характеристики, описывающие волновой процесс, на примере гармонической (синусоидальной) волны. Гармонической (синусоидальной) волной называют волну, для которой частицы среды совершают гармонические колебания около своих положений равновесия с определенной циклической частотой ω.
Рассмотрим процесс возникновения в среде поперечной плоской гармонической волны. Пусть в момент времени t = 0 все частицы в плоскости yOz (для этой
плоскости координатаx равна нулю- x = 0 ) начинают совершать гармонические колебания с периодом колебаний T . На рис. 6.2 для частиц, расположенных на оси Ox , показаны фотографии волны в моменты времени t = 0 , T / 4 , T / 2 и T .
Эти фотографии дают в эти моменты времени смещения ξ(x,y = 0,z = 0,t) частиц
среды около своих положений равновесия. Так, например, в момент времени t = T / 4
Рис. 6.2
частица 1 будет максимально отклонена от своего положения равновесия, ее смещение равно амплитуде колебания ξ(x = 0,y = 0,z = 0,t =T /4) = A , при этом волна за это время проходит расстояние до частицы с номером 3. В момент
времени |
t = T / 2 , |
частица |
1 |
проходит |
положение |
равновесия |
ξ(x = 0,y = 0,z = 0,t =T /2) = 0 , частица |
3 максимально отклонена вверх |
|||||
ξ(x = λ /4,y = 0,z = 0,t =T /2) = A , волна доходит до частицы с номером 5. В момент времени t = T волна достигает частицы с номером 9 и расстояние, пройденное волной за это время, называют длиной волны и обозначают символом λ .
Из рис. 6.2 видно, что чем дальше частица отстоит от источника колебаний, тем больше она запаздывает в совершении колебаний по сравнению с источником колебаний.
Учитывая приведенные выше фотографии распространения плоской поперечной гармонической волны в среде, можно дать следующие определения основных характеристик волнового процесса.
1. Период Т волны – время одного полного колебания частиц среды.
2. Фазовая скорость υ волны или скорость распространения волны – скорость перемещения данной фазы колебаний в среде.
Рис. 6.3
49
3. Длина л волны - расстояние, которое проходит волна за один период или минимальное расстояние между частицами среды, совершающими колебания
с разностью фаз, равной ∆ϕ = 2р. Из определения длины волны можно записать следующую формулу:
λ = υТ = υ/ ν = 2πυ/ ω. |
(6.1) |
4.Волновая поверхность - поверхность, проведенная через равновесные положения частиц среды, совершающих колебания в одинаковой фазе (на Рис. 6.3 приведены волновые поверхности для плоской гармонической волны). Волновых поверхностей много, и они неподвижны.
5.Фронт волны - поверхность, разделяющая частицы среды на вовлеченные и не вовлеченные в колебательное движение. Фронт волны один, и он движется со скоростью волны. Можно сказать, что фронт волны – это самая дальняя от источника колебаний в данный момент времени волновая поверхность. В каждой точке фронта волны вектор фазовой скорости направлен перпендикулярно к ней.
Форма волновых поверхностей и фронта волны зависит от условий возникновения и распространения волны. По виду фронта волны выделяют плоские, сферические, и цилиндрические волны (рис. 6.4). Для этих волн источником колебаний являются соответственно плоскость, точка и протяженная нить.
Рис. 6.4
6.1.2. Уравнение волны. Уравнение плоской гармонической волны. Волновое уравнение. Уравнение сферической волны
Уравнением упругой волны называют функцию ξ(x,y,z,t), которая определяет смещение любой частицы среды с координатами (x, y, z) относительно своего положения равновесия в произвольный момент времени t. В общем случае уравнение волны определяет зависимость от координат и времени величин, описывающих волновой процесс, как для упругих волн, так и для электромагнитных волн. Часто функциюξ(x,y,z,t) называют волновой функцией.
50