

Matan__teoria
.pdf
|
n |
∫ |
f (P)dσ = lim ∑ f (Pk ) σk . |
(σ ) |
d→0 k=1 |
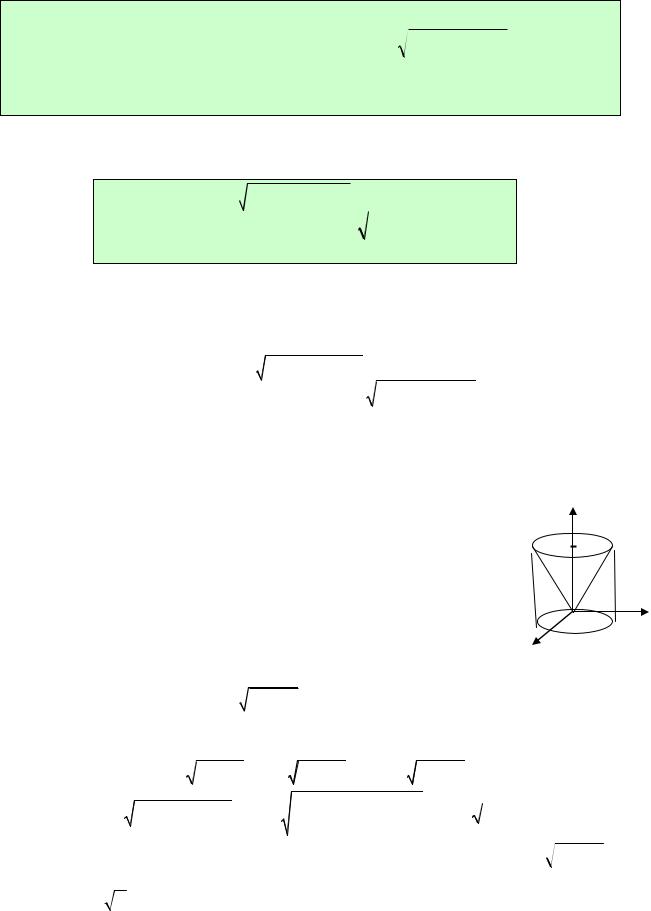
Удобно разбить поверхность (σ ) на ячейки координатными линиями
лим одну из таких ячеек (рис. 51). Рассмотрим радиус(векторы
точек |
P, P , |
P |
: |
r |
= r (u,v), r |
= r (u + u,v), r |
P |
= r |
(u,v + v). |
|||||||||||
|
|
1 |
2 |
|
P |
|
|
P |
|
|
|
|
|
|
|
2 |
|
|
||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
Тогда |
|
= r |
− r |
= r (u + u,v)− r (u,v) = |
|
|
r ≈ r ′ u, |
|
|
|||||||||||
PP |
u |
|
|
|||||||||||||||||
|
1 |
|
P |
P |
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=r |
− r |
= r (u,v + v)− r |
(u,v) = |
|
|
r ≈ r ′ |
v, |
|
||||||||||
|
PP |
v |
||||||||||||||||||
|
2 |
|
P2 |
P |
|
|
|
|
|
|
|
|
|
v |
|
|
|
rP |
||
и площадь ячейки σ |
≈ |
|
|
|
≈ |
|
|
|
|
u v. |
|
|
|
|
||||||
PP |
× PP |
|
r |
′× r ′ |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
1 |
2 |
|
|
u |
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
По аналогии с этим элемент площади поверхности |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
d σ = |
ru′ × rv′ |
dudv |
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lu , lv . Выде(
P1 |
|
lu |
• |
|
|
P |
|
|
P2 |
|
|
rP2 |
l |
v |
|
|
|
Рис.51 |
|
|
(7.34)
Можно показать (строгое доказательство опускаем), что
|
|
∫ |
f (P)dσ = ∫ f (x, y, z)dσ = ∫∫ f (x(u,v), y(u,v), z(u,v)) |
|
ru′×rv′ |
|
du dv. |
(7.35) |
||
|
|
(σ) |
(σ) |
(S) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
Итак, получили следующее правило: |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||
|
Для вычисления поверхностного интеграла ∫ f (P)dσ = ∫ f (x, y, z)dσ следует |
|
||||||||
|
|
|
|
(σ) |
|
(σ) |
|
|
|
|
|
1) в подынтегральной функции подставить вместо |
x, y, z |
их значения на |
|
||||||
|
поверхности (σ ), т.е. |
x = x(u,v), y = y(u,v), z = z(u,v), |
|
|
|
|
|
|
||
|
2) заменить элемент площади dσ на выражение d σ = |
|
ru′× rv′ |
|
du dv ; |
|
|
|||
|
|
|
|
|
||||||
|
3) вычислить получившийся двойной интеграл по области (S) изменения |
|
||||||||
|
переменных (u,v). |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Случай 2. Пусть гладкая поверхность (σ ) задана уравнением, разрешенным от(
носительно z : |
z = z(x, y). Присоединив два очевидных тождества, получим па( |
|||||||||||||||||||
раметрические уравнения поверхности (σ ) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
x = x, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
i j k |
|
|
|
i j k |
|
|
|
|
||||||
y = y, (x, y − параметры); тогда |
rx′× ry′ = |
x′x |
y′x z′x |
|
|
|
1 0 z′x |
|
||||||||||||
|
= |
|
|
= −z′x i |
− z′y j |
+ k , |
||||||||||||||
z = z(x, y), |
|
|
|
|
|
|
x′y y′y z′y |
|
|
|
0 1 z′y |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
и по формуле (7.34) получим |
dσ = |
|
1+ (z′x)2 + (z′y)2 dxdy |
|
. Таким образом, |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
dσ = 1+ (z′ )2 + (z′ )2 |
dx dy; |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
x |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(x, y, z(x, y)) |
|
|
|
|
|
|
|
(7.36) |
||||||
|
σ∫ |
f (x, y, z)dσ = |
∫∫ |
f |
1+ (z′ )2 |
|
+ (z′ )2 |
dxdy. |
|
|
||||||||||
|
|
|
|
|
|
|
|
x |
|
y |
|
|
|
|
|
|||||
|
( |
|
) |
(σxy) |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
71
Итак, для вычисления поверхностного интеграла ∫ f (P)dσ = ∫ f (x, y, z)dσ следует:
(σ) (σ)
1)вподынтегральнойфункциизаменить z егозначением z(x, y) наповерхности (σ ),
2)заменить элемент площади dσ на выражение 
 1+ (z′x)2 + (z′y)2 dxdy,
1+ (z′x)2 + (z′y)2 dxdy,
3)вычислить получившийся двойной интеграл по проекции (σ x y ) поверхности
(σ ) на плоскость XOY .
Случай 3. Пусть гладкая поверхность (σ ) задана уравнением, разрешенным от( носительно x : x = x(y, z). Тогда
dσ = 
 1+ (x′y)2 + (x′z)2 dy dz;
1+ (x′y)2 + (x′z)2 dy dz;
∫ |
f (x, y, z)dσ = ∫∫ f (x(y, z), y, z) |
1+ (x′y) |
2 |
+ (x′z) |
2 |
dy dz. |
(7.37) |
|
|
|
|||||
( ) |
(σ y z) |
|
|
|
|
|
|
σ |
|
|
|
|
|
|
|
Здесь (σ yz ) есть проекция поверхности (σ ) на плоскость YOZ .
Случай 4. Пусть гладкая поверхность (σ ) задана уравнением, разрешенным от( носительно y : y = y(x, z) . Тогда
|
dσ = |
′ |
2 |
′ |
) |
2 |
dxdz; |
|
||
|
1+ (y ) |
|
+ (y |
|
|
|||||
|
|
x |
|
z |
|
|
|
|
|
|
∫ |
f (x, y, z)dσ = ∫∫ |
f (x, y(x, z), z) 1+ (y′x)2 + (y′z)2 dxdz. |
(7.38) |
|||||||
( ) |
(σx z) |
|
|
|
|
|
|
|
|
|
σ |
|
|
|
|
|
|
|
|
|
|
Здесь (σ xz ) есть проекция поверхности (σ ) на плоскость XOZ .
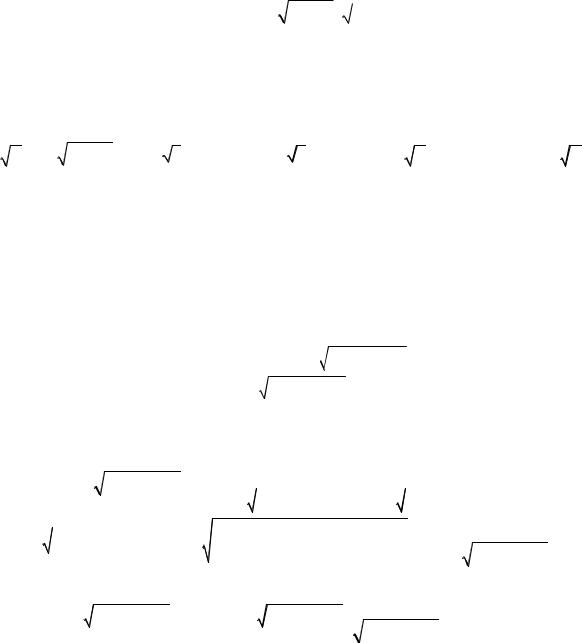
Пример 7.25.Найти массу однородной поверхности x2 + y2 = z2 , (0 ≤ z ≤ 3) , если γ = z .
Решение. Построим поверхность x2 + y2 = z2 методом сечений. В сечении x = 0 получаем y2 = z2 или y = ± z . Это – пара прямых в плоскости YOZ (рис. 52). В сечении z = 3 получаем окружность x2 + y2 = 32 . Таким образом, уравнение x2 + y2 = z2 определяет ко( ническую поверхность. Массу поверхности найдем с помощью поверхностного интеграла: m = ∫ γ dσ = ∫ z dσ .
(σ) (σ)
Для вычисления этого интеграла уравнение поверхности удобно разрешить относительно z : z = 
 x2 + y2 . Найдем z′x , z′y и затем dσ
x2 + y2 . Найдем z′x , z′y и затем dσ
формул (7.36):
z
3
0 y
x |
Рис. 52 |
Рис. 52 |
по первой из
|
z′x = |
|
1 |
|
|
2x = |
|
|
x |
|
|
|
|
z′y = |
|
|
|
y |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
; |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
2 x2 + y2 |
|
|
x2 + y2 |
|
|
|
|
x2 + y2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
y2 |
|
|
|
|
|
|
|
|||
dσ = 1+ (z′ )2 |
+ (z′ )2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
dxdy = |
1+ |
|
+ |
|
|
|
dxdy = 2 dxdy . |
||||||||||||||||||
x2 |
+ y2 |
|
x2 + y2 |
||||||||||||||||||||||
|
x |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Теперь вычислим ∫ z dσ , подставляя значение z на поверхности (z = 
 x2 + y2 ) и
x2 + y2 ) и
(σ)
значение dσ = 
 2 dx dy :
2 dx dy :
72
m = ∫ |
z dσ = ∫∫ x2 + y2 |
2 |
dxdy . |
(σ) |
(σxy) |
||
Здесь (σ xy ) есть проекция конической поверхности (σ ) на плоскость XOY , т.е. круг
радиусом 3 |
(рис. 52). Двойной интеграл по кругу удобнее вычислять в полярной |
|||||||||||||||||||||
системе координат. Для этого заменим x2 + y2 |
на ρ2 , а dxdy на ρ dρ dϕ . Получим |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2π |
3 |
|
|
2π |
ρ3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
2 |
|
2 |
|
2 |
|
|
|
2 |
|
|
|
|
|
||||
m = 2 ∫∫ |
|
x |
|
+ y |
|
dxdy = |
2 ∫∫ ρ dρdϕ = 2 |
∫ dϕ ∫ρ |
dρ = |
2 ∫ |
|
|
|
dϕ =18π 2 . |
||||||||
|
|
|
|
|||||||||||||||||||
|
|
(σxy) |
|
|
|
|
|
|
(σxy) |
0 |
0 |
|
|
0 |
3 |
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Пример 7.26. Найти момент инерции относительно начала координат полусфе( ры x2 + y2 + z2 = R2 , (z ≥ 0) , если плотность γ = z .
Решение. Момент инерции относительно начала координат поверхности найдем с помощью поверхностного интеграла по второй из формул (6.13) :
I0 = (σ∫) (x2 + y2 + z2) γ dσ .
На поверхности сферы x2 + y2 + z2 = R2 , γ = z = 
 R2 − x2 − y2 . Поэтому
R2 − x2 − y2 . Поэтому
I0 = (σ∫) R2 
 R2 − x2 − y2 dσ .
R2 − x2 − y2 dσ .
Для вычисления этого интеграла разрешим уравнение поверхности относитель(
но z , найдем z′x , z′y |
и затем dσ по первой из формул (7.36): |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
z′x = |
|
|
− x |
|
|
|
|
|
|
|
|
z′y = |
|
|
|
−y |
|
|
|
|
|
|
|
||||
|
|
z = R2 − x2 − y2 , |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
; |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
R2 − x2 − y2 |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 − x2 − y2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
y2 |
|
|
|
|
|
|
|
|
R dxdy |
. |
|
||
dσ = |
|
1+ (z′ )2 + (z′ )2 dxdy = |
1+ |
|
|
|
+ |
|
|
|
|
|
|
|
dxdy = |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
x |
y |
|
R2 |
− x2 − y2 |
|
|
R2 |
− x2 − y2 |
|
|
|
|
|
|
R2 − x2 − y2 |
|
||||||||||||||||
Подставляя выражение для dσ в интеграл, получим |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Rdxdy |
== R3 |
|
|
|
|||||||||||||||||||||
I = |
|
R2 |
|
R2 − x2 − y2 dσ = R2 |
|
R2 − x2 − y2 |
|
dxdy . |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
0 |
(σ∫) |
|
|
|
|
|
|
|
(σ∫∫x y) |
|
|
|
|
|
|
|
|
|
|
R2 − x2 − y2 |
|
|
(σ∫∫x y) |
|
|||||||||||
Проекция (σ x y ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(σ∫∫xy) |
|
|||
полусферы на плоскость XOY |
|
|
|
есть круг радиусом R ; |
dxdy |
||||||||||||||||||||||||||||||
равен площади π R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(σ∫∫x y) |
|
|
|
|
π R2 |
|
= π R5 . |
|
||||||||||
этого круга. Поэтому |
I0 = R3 |
|
dxdy = R3 |
|
|
||||||||||||||||||||||||||||||
Глава 3. ТЕОРИЯ СКАЛЯРНОГО И ВЕКТОРНОГО ПОЛЯ
8. Скалярное поле
Скалярное поле – это область пространства, в которой задана скалярная функция f (x, y,z) , называемая функцией поля. Например, это может быть поле температур, поле давлений и т.д.
Множество точек поля, в которых функция поля принимает посто( янное значение c , образует поверхность с уравнением f (x, y,z) = c , называемую поверхностью уровня поля. Если плоское скалярное поле, например, находится
73

в плоскости XOY , то его функция поля f (x, y) зависит от двух переменных x и y , а множество точек, в которых f (x, y) = c , образуют линию уровня. Линии уровня используются при составлении географических карт (для изображения точек, расположенных на одинаковой высоте над уровнем моря), при составлении ме( теорологических карт (для изображения линий одинаковых температур – изо( терм и линий одинакового давления – изобар).
8.1. Производная поля по направлению
Для характеристики скорости изменения поля f (x, y,z) в направлении век(
тора l введем понятие производной поля по направле( |
|
|
|
нию. Пусть задана точка M и вектор |
l , выходящий из |
l |
|
точки M (рис. 53). Рассмотрим точку |
M1, лежащую на |
M1 |
|
|
|||
векторе l , и величину f (M1) − f (M) = f (M) – приращение |
M |
l |
|
Рис. 53
функции поля f (M) в точке M в направлении l .
Определение. Производной поля f (M) в точке M в направлении l называют величину
|
|
|
|
|
|
∂ f (M) = lim |
|
|
f (M) |
= |
|
lim |
|
f (M1) − f |
(M) |
. |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
∂ l |
l→0 |
|
|
l |
|
|
|
M 1→M |
|
M1 M |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
Свойства производной по направлению |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
1). Скорость изменения функции f (M) |
в точке M в направлении l |
равна |
∂ f |
(M) . |
|||||||||||||||||||||||||||||
∂ l |
|||||||||||||||||||||||||||||||||
2).Поле f (M) вточке M внаправлении l |
возрастаеттогдаитолькотогда,когда |
∂ f |
(M) ≥ 0 . |
||||||||||||||||||||||||||||||
∂ l |
|||||||||||||||||||||||||||||||||
3).Поле f (M) вточке M внаправлении l |
убывает тогдаитолькотогда,когда |
∂ f |
(M) ≤ 0 . |
||||||||||||||||||||||||||||||
∂ l |
|||||||||||||||||||||||||||||||||
4).Если l || ox , то ∂∂ lf = ∂∂ xf |
; если l |
|| oy , то ∂∂ lf = ∂∂ yf . |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Действительно, 1) f (M) |
есть изменение функции f (M) |
на участке MM1 , |
|||||||||||||||||||||||||||||||
|
f (M) |
есть средняя скорость изменения функции |
|
f (M) |
на участке MM1 , |
||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lim |
|
f (M) |
есть скорость изменения функции |
f (M) в точке M внаправлении l ; |
||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||
|
l→0 |
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2) в направлении l поле |
f (M) возрастает |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
f (M1) > f (M ) |
|
|
f |
(M1)− f (M ) |
> 0 |
|
∂ f |
(M) ≥ 0 |
; |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
M M1 |
|
|
∂ l |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
3) следующее свойство проверяется так же, как предыдущее свойство; |
||||||||||||||||||||||||||||||||
|
4) если, например, l || ox , то |
|
f = |
|
f и потому |
∂ f |
= ∂ f . |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
l |
|
|
|
|
x |
|
|
|
|
|
|
|
|
∂ l |
∂ x |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Формула для вычисления производной по направлению |
||||||||||||||||||||||||||||
|
|
Пусть функция f (M) = f (x, y,z) |
– дифференцируема в точке M(x, y,z) . Тогда |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
f (M) = f ′ |
(M) x + f′ |
(M) y + f |
′ (M) z + o(ρ) , |
(8.1) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
y |
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
74
где ρ = 
 ( x)2 + ( y)2 + ( z)2 = l
( x)2 + ( y)2 + ( z)2 = l
Поделим равенство (8.1) на l
и lim |
o(ρ) = lim |
o( l) |
= 0. |
|
|||
ρ→0 |
ρ l→0 |
l |
|
:
|
f (M) |
= fx′ (M) |
x + fy′ (M) |
y |
+ fz′ (M) z |
+ |
o( l) |
. |
(8.2) |
||||||||||||||||||||||||||
|
|
|
l |
|
|||||||||||||||||||||||||||||||
|
|
l |
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
l |
|
l |
|
|
|
|
|
||||||||
Рассмотрим вектор grad f (M) ={fx′ (M), fy′ (M), |
|
fz′ (M)}, |
называемый |
градиентом |
|||||||||||||||||||||||||||||||
|
= |
x |
, |
y |
, |
z |
|
, равный единичному вектору направления l . |
|||||||||||||||||||||||||||
поля f (M) , и вектор l |
0 |
{ l |
l |
l } |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда равенство (8.2) можно записать в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
f (M) |
|
|
|
|
|
|
|
o( l) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
= grad f (M) l |
|
+ |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
l |
|
|
0 |
|
|
l |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где первое слагаемое есть скалярное произведение векторов grad f (M) |
и l0 . |
||||||||||||||||||||||||||||||||||
В пределе при l , стремящемся к нулю, получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
∂ f (M) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
= grad f (M) l |
|
|
, |
|
|
|
|
|
|
(8.3) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
∂ l |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где grad f (M) ={fx′ (M), |
fy′ (M), |
fz′ (M)}─ градиент скалярного поля f (M ), l0 = |
|
|
|
||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
─ единичный вектор направления l . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
8.2. Градиент скалярного поля и его свойства |
|
|
|
|
|
||||||||||||||||||||||||||||||
Вектор grad f (M) ={fx′ (M), |
fy′ (M), fz′ (M)} является важной характеристикой ска( |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ |
|
|
∂ |
|
|
∂ |
|
|
|
|
|
|
|
||||||
лярного поля. Введем условный оператор = |
|
|
|
i |
+ |
|
|
j |
+ |
|
k (оператор Гамильто( |
||||||||||||||||||||||||
|
|
|
∂y |
∂z |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
на или вектор “набла”). С его помощью удобно записать градиент скалярного поля
|
|
∂ |
|
∂ |
|
|
|
|
|
|||
|
grad f = { |
f , |
f , |
∂ |
f }= f. |
|
|
|
|
|||
|
∂x |
∂y |
∂z |
|
|
|
|
|||||
Отметим ряд свойств градиента. |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|||||||
1). Скалярное поле f (M) в точке M0 |
быстрее всего возрастает в направ( |
|||||||||||
|
|
|
|
|||||||||
лении вектора grad f (M0) со скоростью, равной |
grad f (M0) |
. |
|
|
||||||||
2). Скалярное поле f (M) в точке M0 быстрее всего убывает в направлении, |
||||||||||||
|
|
|||||||||||
противоположном вектору grad f (M0) , со скоростью, равной |
grad f (M0) |
. |
||||||||||
3). Вектор grad f (M0) |
направлен по нормали к поверхности уровня поля |
|||||
f (M) , проходящей через точку M0 . |
|
|||||
4). Дифференциальные свойства: |
|
|
||||
4.1) grad(u + v) = gradu + grad v, |
|
4.2) grad(u v) = u gradv + v gradu, |
||||
4.3) grad(u)= |
v gradu − u gradv |
, |
4.4) grad f (u) = fu′ gradu, |
|||
|
v |
2 |
||||
v |
|
|
|
|
||
4.5) grad r = |
r |
, |
|
|
|
4.6) grad(a r) = a. |
r |
|
|
|
|||
|
|
|
|
|
|
|
Проверим эти свойства.
1. Из формулы (8.3) и определения скалярного произведения следует, что
75
|
|
|
∂ f (M0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
= grad f (M ) l |
|
= |
grad f (M ) |
|
|
l |
|
cosϕ , |
|||||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
∂l |
0 |
|
0 |
|
0 |
|
|
|
0 |
|
|
|
|||||||
где ϕ ─ угол между векторами grad f (M0) |
|
и l . Так как длина единичного векто( |
||||||||||||||||||||
ра l0 равна единице, то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
∂ f (M0) |
= |
|
grad f (M ) |
|
cosϕ . |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
∂ l |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||
Поэтому |
∂ f (M0) |
принимает наибольшее значение, равное |
|
grad f (M ) |
|
, когда cosϕ =1, |
||||||||||||||||
|
|
|||||||||||||||||||||
∂l |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
||
то есть угол ϕ между векторами grad f (M0) |
и l равен нулю и grad f (M0) ↑↑ l . |
|||||||||||||||||||||
2. Производная |
∂ f (M0) |
будет принимать наименьшее значение, когда cosϕ = −1, |
|||||
|
|||||||
|
∂l |
|
|
|
|
|
|
т.е. угол ϕ =π и grad f (M0) ↑↓ l . |
|
|
|
|
|||
3. Поверхность уровня поля |
f (x, y,z) |
имеет уравнение f (x, y,z) = c . Нормальный |
|||||
|
= { f′ |
, f ′ , |
f ′} |
|
|
||
вектор этой поверхности N |
|
совпадает с grad f (M ) . Значит, вектор |
|||||
|
|
|
x |
y |
z |
M0 |
0 |
grad f (M0) направлен по нормали к поверхности уровня поля f (M) , проведенной в точке M0 .
4.1. grad(u + v) = {(u + v)′x , (u + v)′y , (u + v)′z }= {u′x , u′y , u′z}+{v′x , v′y , v′z} = gradu + gradv;
аналогично проверяются свойства 4.2), 4.3), 4.4); |
для проверки свойства 4.5) |
||||||||||||||||||||||||||||||
учтем, что r = {x, y, z}, |
|
|
|
|
r′ |
|
|
|
|
|
|
x |
|
|
|
|
= |
x |
; аналогично, |
||||||||||||
r = |
|
x2 + y2 + z2 , |
= |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
x2 + y2 + z2 |
|
r |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
ry′ = |
y |
rz′ = |
z |
и поэтому grad r = {rx′ ,ry′ ,rz′} |
= { |
x |
|
y |
|
z |
}= |
1 |
{x, y, z} = |
r |
|||||||||||||||||
|
, |
|
|
, |
|
, |
|
|
|
|
; |
||||||||||||||||||||
r |
r |
r |
r |
r |
|
r |
r |
||||||||||||||||||||||||
4.6. grad(a r ) |
= grad(a x + a |
2 |
y + a |
3 |
z) = {a , a |
2 |
, a } = a . |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
1 |
|
|
|
1 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Из первого и третьего свойств следует инвариантное определение градиента, т.е. определение, не зависящее от системы координат:
Градиент скалярного поля f (M ) в точке M0 есть вектор, который
а) по величине равен наибольшей скорости возрастания поля f (M ) в точке M0 ,
б) направлен по нормали к поверхности уровня поля f (M) , проходящей че( рез точку M0 , в сторону наибольшего возрастания поля.
Пример 8.1. Найти наибольшую скорость возрастания поля f (r) = r3 в точке A(1,2,2).
Решение. Найдем градиент поля:
grad f (r) = gradr3 = 3r2 grad r = 3r2 rr = 3r r . Наибольшая скорость возрастания поля в точке A равна
grad f (r) A = 3r r A = 3r2 A = 3 (x2 + y2 + z2) A = 27.
Пример 8.2. Доказать оптическое свойство эллипса: лучи, выходящие из одного фокуса эллипса, после отражения от эллипса проходят через другой фокус эллипса.
Решение. Пусть F1, F2 − фокусы эллипса; r1 = F1P, r2 = F2P (рис. 54). Рассмотрим
76
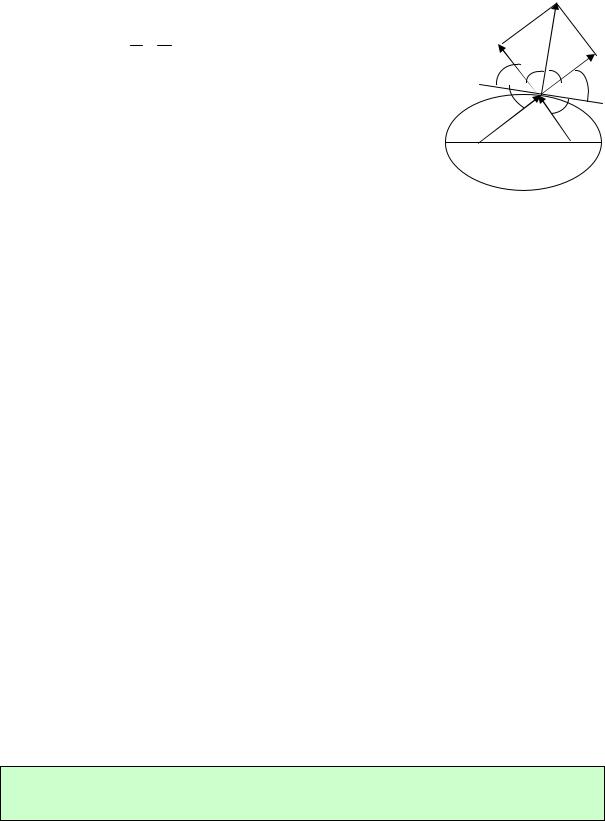
скалярное поле f (P) = r1 + r2 . По определению эллипса точка P принадлежит эллипсу тогда и только тогда, когда f (P) = r1 + r2 = const , т.е. эллипс есть линия
уровня скалярного поля f (P) ; поэтому grad(r1 + r2)= |
r1 |
+ |
r2 |
направлен по норма( |
r |
r |
|||
1 |
2 |
|
||
ли к эллипсу в точке P . Кроме того, этот вектор направлен по диагонали параллелограмма, построен(
ного на векторах r1 , r2 . Длины этих векторов равны
r1 r2
единице, поэтому параллелограмм является ромбом и его диагональ является биссектрисой угла ромба, т.е.α1 = α 2 . Тогда β1 = β 2 , как углы дополнительные
до прямого. Так как γ 1 = β1, γ 2 = β 2 , то γ 1 = γ 2 , т.е. луч, выходящий из фокуса F1 эллипса, после отра( жения от эллипса пройдет через другой фокус F2 .
|
|
|
|
|
grad(r1 + r2) |
|||
|
r2 |
|
|
|
|
|
r1 |
|
|
r2 |
β1 |
α1 |
α |
2 |
|
||
|
|
r1 |
||||||
|
|
|
|
β |
2 |
|||
|
|
γ 2 |
• |
|
|
|
||
|
|
γ 1 |
|
|
|
|||
|
|
P |
|
|
|
|||
|
|
|
|
|
|
|||
• |
r1 |
r |
2 |
|
|
|
|
|
|
|
• |
|
|
|
|||
|
|
|
|
|
|
|||
F1 |
|
|
|
F2 |
|
|
|
|
Рис. 54
9. Векторное поле и векторные линии
Векторное поле – это область пространства, в каждой точке M которой за( дан вектор a(M) .
Пример 9.1. Пусть на материальную точку в области D действует сила F(M ).
Тогда в области D определено векторное поле F(M ).
Пример 9.2. Пусть в области D происходит течение жидкости и в каждой точке M задан вектор v(M ) скорости частицы жидкости. Тогда в области D опреде( лено векторное поле скоростей жидкости.
Пример 9.3. Поместим заряд + q в начало координат. Тогда сила, с которой этот заряд действует на единичный положительный заряд, помещенный в точку M , определяется по закону Кулона:
|
q |
|
r |
|
|
E = |
|
|
|
, |
|
r2 |
r |
||||
|
|
|
где r ─ вектор, идущий из начала координат в точку M (радиус(вектор точки M ), r ─ его длина. Имеем векторное поле напряженностей E(M) , создаваемое зарядом q .
Мы будем рассматривать только стационарные поля, для которых вектор поля a(M ) зависит от точки M и не зависит от времени. Проекции вектора a(M ) на оси координат обозначим P(M ), Q(M ), R(M ). Тогда:
a(M ) = P(M )i +Q(M ) j + R(M )k .
Далее всюду предполагаем, что функции P, Q, R непрерывны вместе со свои( ми частными производными; в противном случае точку поля назовем особой.
Одной из характеристик векторного поля являются векторные линии.
Векторной линией векторного поля называют линию, в каждой точке которой касательный вектор коллинеарен вектору поля (рис. 55).
77
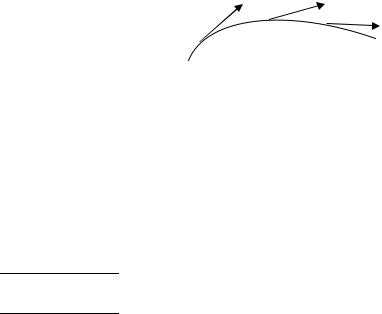
Векторные линии в конкретных полях имеют ясный физический смысл.
В поле скоростей текущей жидкости векторные линии – |
a (M ) |
это линии тока этой жидкости, т. е. линии, по которым |
|
движутся частицы жидкости. |
M |
|
|
В электрическом поле векторные линии – это сило( |
|
вые линии и их расположение очень важно в физике. |
Рис. 55 |
|
Выведем |
уравнения векторных линий |
для |
поля |
|
a |
|
|
|
|
не выписаны). |
(M) = Pi + Q j + Rk (для краткости аргументы функций P, Q, R |
|||||
|
Пусть уравнения векторной линии x = x(t), |
y = y(t), z = z(t) , |
(t − параметр). Ка( |
||
сательным вектором этой линии является вектор |
r ′(t) = {x′(t), y′(t), z′(t)} и вектор |
||||
r ′(t)dt = {x′(t)dt, y′(t)dt, z′(t)dt}={dx, dy, dz}. |
|
|
|
||
По определению векторной линии ее касательный вектор r ′(t)dt и вектор поля a = {P, Q, R} коллинеарны. Поэтому координаты этих векторов пропорциональны, т. е.
 . (9.1)
. (9.1)
Мы получили систему дифференциальных уравнений для отыскания векторных линий поля a . Как решается такая система, покажем на примерах 9.4 и 9.5.
Пример 9.4. Магнитное поле H(M) создано электрическим током силы J , текущим по бесконечно длинному прямому проводу l . Найти силовые линии этого поля.
Решение. Если провод l принять за ось Oz некоторой декартовой системы ко( ординат, то, как известно из физики,
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
+ xj . |
|
|
|
|
|
|
|
|
|
|
H(M ) = 2J −yi |
|
|
|
||||
|
|
|
|
|
|
|
|
|
x2 + y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Запишем уравнения векторных линий для поля H(M) : |
|
||||||||||||
|
|
dx |
|
= |
|
dy |
= |
dz |
или |
dx |
= dy |
, dz = 0 . |
|
|
|
|
|
|
|
|
|||||||
|
−2J |
y |
|
|
2J |
x |
0 |
|
|
−y |
x |
|
|
|
x2 + y2 |
|
|
x2 + y2 |
|
|
|
|
|
|
|
||
Из первого уравнения имеем xdx = −ydy, ∫xdx = −∫ ydy, |
x2 = −y2 + C . Из второго |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уравнения z = h. Таким образом, силовые линии поля H(M) есть окружности
x2 + y2 = C , расположенные в плоскостях z = h, параллельных плоскости XOY .
Пример 9.5. Найти векторные линии поля |
|
|
|
|
+ (z − x)2 |
|
||||||||||||||
a |
= zi |
j + xk . |
||||||||||||||||||
Решение. Учитывая, что P = z, |
Q = (z − x)2, R = x , запишем систему (9.1): |
|||||||||||||||||||
|
|
|
|
|
|
dx = |
|
dy |
= dz . |
|
|
|
|
|||||||
|
|
|
|
|
|
(z − x)2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
z |
|
|
x |
|
|
|
|
|||||||
В одном из уравнений этой системы |
|
dx |
= |
dz |
|
разделим переменные: xdx = zdz . |
||||||||||||||
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
z |
x |
|
|
|
|
|
|
|
||
Теперь проинтегрируем ∫xdx = ∫zdz и получим |
|
|
|
|
||||||||||||||||
|
x |
2 |
= |
z |
2 |
+ |
C |
|
или |
|
|
2 |
− z |
2 |
= C . |
|
||||
|
|
|
1 |
|
|
|
x |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
2 |
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
78
Чтобы решить другое уравнение системы, воспользуемся известным свойством
пропорций: если |
a |
= |
c |
, то |
a = |
c |
= |
λ a + 8 c |
. В нашем примере удобно взять |
|
|
|
λ b + 8 d |
||||||
|
b |
|
d |
b d |
|
||||
λ = 1, 8 = −1 и записать систему уравнений следующим образом:
dy |
= dx = dz = dx − dz |
или |
dy |
= |
−d(z − x) . |
|||
(z − x)2 |
(z − x)2 |
|||||||
z |
x |
z − x |
|
|
(z − x) |
|||
Разделим переменные: dy = −(z − x)d(z − x) . Проинтегрируем ∫dy = −∫(z − x)d(z − x) и
получим y = − (z − x)2 |
+ C . Таким образом, векторные линии данного поля есть |
||
2 |
2 |
|
|
|
|
|
|
линии пересечения поверхностей x2 − z2 = C |
и y = − (z − x)2 |
+ C . |
|
|
1 |
2 |
2 |
|
|
|
|
10. Поток векторного поля
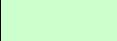
Всюду в дальнейшем мы будем рассматривать так называемую ориентиро( ванную поверхность, т. е. поверхность, в каждой точке ко( торой выбрано направление нормали с помощью единичного
вектора n(M) , причем n(M) является непрерывной вектор(
функцией точки M (рис. 56). Изменение направления нормалей на противоположное
будем называть изменением ориентации поверхности. Рассмотрим физическую задачу о потоке жидкости,
приводящую к понятию потока поля.
10.1. Задача о количестве жидкости
Пусть в некоторой части пространства течет жидкость, причем скорость ча( стицы жидкости зависит только от точки, через которую протекает жидкость, и не зависит от времени, т. е. v = v (M) . Требуется вычислить количество (объем) жидкости Π σ , протекающее в единицу времени через ориентированную по(
верхность (σ ) в выбранном направлении (предполагается, что жидкость может свободно протекать через эту поверхность).
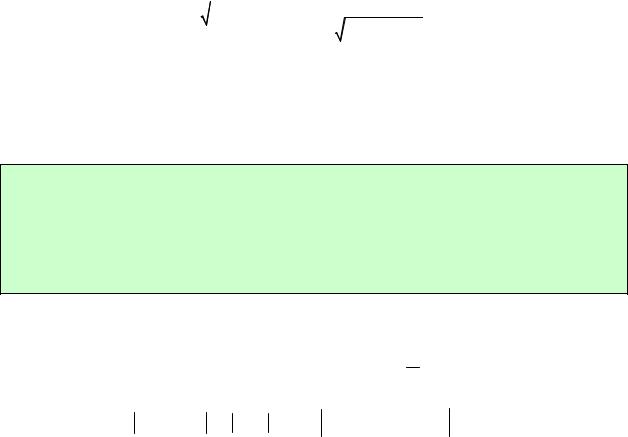
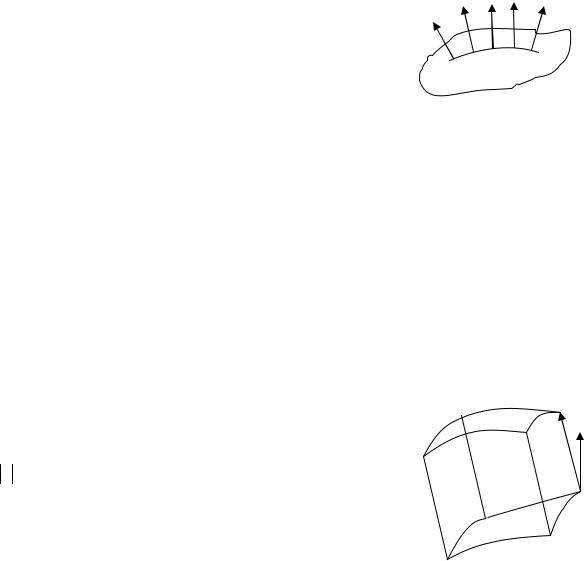
Рассмотрим сначала простейший случай. Пусть (σ ) ─ плоская площадка с
нормальным вектором n , а скорость течения жидкости |
v во всех точках одна и |
||||||||||||||||||||
та же. Тогда количество жидкости, протекающей через эту площадку в единицу |
|||||||||||||||||||||
времени, равно (рис. 57) объему цилиндра с основанием σ и |
|
|
|||||||||||||||||||
образующей |
|
v |
|
|
. Так как высота этого |
цилиндра |
равна |
|
n |
||||||||||||
|
|
|
|
||||||||||||||||||
|
пр v |
|
|
(v,n) |
|
|
|
|
|
(v,n) |
|
|
|
(v,n) |
|
|
|
|
|||
|
|
= |
|
= |
|
|
, то его объем равен |
|
|
σ . Эта ве( |
|
v |
|||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
||||||||||||||||||
|
n |
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
личина и равна количеству жидкости, протекающей через (σ ). |
|
|
|||||||||||||||||||
Опустив знак абсолютной величины, мы получим величину |
(σ ) |
|
|||||||||||||||||||
(v,n) σ , которую называют потоком жидкости через (σ ). Если |
|
|
|||||||||||||||||||
угол между векторами v и n ─ острый, то говорят, что жид( |
Рис. 57 |
|
|||||||||||||||||||
кость течет в направлении вектора n ; в этом случае (v,n) > 0 |
|
||||||||||||||||||||
|
|
||||||||||||||||||||
и поток совпадает с количеством жидкости. Если угол между векторами v |
и n |
||||||||||||||||||||
79
тупой, то говорят, что жидкость течет в направлении, противоположном векто( ру n ; в этом случае (v,n) < 0 и поток отличается от количества жидкости зна(
ком. Если векторы v и n перпендикулярны, то жидкость течет вдоль площадки (σ ) и поток равен нулю.
Перейдем теперь к общему случаю. Для вычисления |
|
||||
потока жидкости через произвольную поверхность (σ ) |
|
||||
разобьем эту поверхность на n частей ( σ1), ..., ( σn ) с |
Mk |
||||
|
|||||
площадями σ1, ..., σn (рис. 58). На каждой площадке |
|
||||
( σk ) |
выберем произвольную точку Mk . Будем при( |
|
|||
ближенно считать, что все частицы, протекающие через |
Рис. 58 |
||||
малую |
|
площадку ( σk) , имеют |
одинаковые скорости |
|
|
v ≈ v (M |
k |
); кроме того, площадку будем считать плоской и перпендикулярной |
|||
нормальному вектору n(Mk ) . |
|
|
|
||
Тогда поток жидкости через площадку ( σk ) приближенно равен |
|
||||
|
|
Π σ |
≈ |
(v (Mk ),n(Mk )) σk . |
|
|
|
|
k |
|
|
Для потока через всю поверхность получим |
|
||||
|
|
n |
|
n |
|
|
|
Πσ = ∑Π σk ≈ ∑ (v (Mk ),n(Mk )) σk . |
|
||
|
|
k=1 |
|
k=1 |
|
Это приближенное равенство будет тем точнее, чем меньше d = max{ σ1, ..., σn} . Точное значение потока определяется как предел этой суммы при d → 0:
|
|
n |
(v (Mk ),n(Mk )) σk . |
Πσ |
= lim |
∑ |
|
|
d→0 |
k=1 |
|
Полученный предел равен |
поверхностному интегралу I рода от скалярной |
||
функции (v(M ),n(M )). Таким образом, поток жидкости через поверхность (σ )
вычисляется по формуле
Πσ = ∫ (v,n)dσ |
. |
(10.1) |
(σ) |
|
|
|
|
|
Отметим, что 1) если суммарный поток Πσ > 0 , то количество жидкости, протекающей в направ(
лении нормали n , больше количества жидкости, протекающей в направлении − n ; 2) если суммарный поток Πσ < 0, то количество жидкости, протекающей в направ( лении нормали n , меньше количества жидкости, протекающей в направлении − n ; 3) если Πσ = 0 , то количества жидкости, протекающей в том и другом направ( лении, одинаковы.
Интеграл в формуле (10.1) является поверхностным интегралом первого ро( да от скалярной функции (v,n) . Его также называют поверхностным интегра(
лом второго рода от вектор(функции v . Аналогичным образом определяют по( ток и для произвольного векторного поля a .
80