

22.2. Формальное описание тп на примере графов и табличных моделей.
Одной
из разновидностей математич. моделей
ТП явл. упорядочивающие модели. Они
позволяют установить состав и взаимосвязь
элементов технологического процесса.
Ниже будут затронуты табличные 
Группа деталей
Рассмотрим одну из табличных моделей – дизъюнктивную модель обработки приведённой выше группы деталей на токарно – револьверном станке (исходная заготовка – пруток) (табл. 5.2).
|
Операторы технологии |
Предикаты - свойства | |||||
|
F1 |
F2 |
F3 |
F4 |
F5 |
F6 | |
|
Подрезать |
1 |
|
|
|
|
|
|
Точить |
|
1 |
|
|
|
|
|
Точить |
|
|
1 |
|
|
|
|
Точить |
|
|
|
1 |
|
|
|
Сверлить |
|
|
|
|
|
1 |
|
Отрезать |
|
|
|
|
1 |
|
В табличных моделях технологических процессов одному варианту математической модели соответствует единственный вариант ТП. Поэтому табличные модели прим.для проектир. рабочего ТП на основе выбранного унифицир.ТП.
В сетевых моделях ТП для одного варианта математич. модели изделия может быть определено несколько вариантов рабочих ТП, котор. могут быть найдены при помощи граф – сети. Но при этом порядок выполнения технологич. операторов не может быть нарушен (модель также упорядочивающая). Отличие от табличных моделей – возможность изменения состава ТП в различных его вариантах. Кроме упорядочивающих моделей ТП (табличных и сетевых) существуют ещё перестановочные модели. Такие модели прим. при проектировании ТП сборки.
Граф – это множество объектов (вершин) и множество связок (ребер), соединяемых пары данные объекты.
Граф размерных связей
Вершины – это торцовые поверхности, ребра – это линейные однокоординатные размеры.
Граф не может существовать без вершин.
Математическое описание графа имеет вид : G (A, E)
A – это множество вершин
Е – это множество связок
Если связка имеет направление, то это дуга, если не имеет направления, то это ребро.
Граф, содержащий только рёбра ,называется неориентированным. Граф, содержащий только дуги, называется ориентированным.
Вершины графа обозначаются либо цифрами, либо малыми латинскими буквами, а рёбра латинскими буквами с индексами (ej). Дуги обозначаются буквами с двумя индексами (ei,j), где первый индекс обозначает начальную вершину, второй конечную вершину.
Три способа задания графов
1) графический
2) матрицей смежности (ориентированный)
(неориентированный)
|
|
1 |
2 |
3 |
4 |
|
1 |
0 |
1 |
0 |
1 |
|
2 |
1 |
0 |
1 |
0 |
|
3 |
0 |
1 |
0 |
0 |
|
4 |
1 |
0 |
0 |
0 |
|
|
1 |
2 |
3 |
4 |
|
1 |
0 |
1 |
1 |
0 |
|
2 |
0 |
0 |
0 |
1 |
|
3 |
0 |
0 |
0 |
1 |
|
4 |
0 |
0 |
0 |
0 |
(ориентированный)Начало дуги соответ. номеру вершины в строке, конец номеру вершины в столбце. (ориентировн.)
3) списком связок
|
Дуга |
Начало |
Конец |
|
е1,2 |
1 |
2 |
|
е1,3 |
1 |
3 |
|
е2,4 |
2 |
4 |
|
е3,4 |
3 |
4 |
|
Рёбра |
Вершины | |
|
е1 |
1 |
2 |
|
е2 |
2 |
3 |
|
е3 |
1 |
4 |
Неориентированные графы
(понятия: маршрут,цикл,цепь,граф-дерево)
Маршрут – это непрерывная последовательность рёбер, когда каждые два соседних имеют общую вершину.
М(1,5) -> (е1, е5); М(1,5) -> (е1, е3, e6); М(1,5) -> (е1, е2, e2, e4, e7) в третьем маршруте ребро е2 встречается два раза.
Маршрут, в котор. каждое из рёбер встречается не более одного раза называется цепью. Следовательно, первый и второй маршруты являются цепями. Если начало и конец маршрута сходятся в одной вершине, то он называется циклическим маршрутом. М(1,1) -> (е1, е3, е6, е5, е1) является циклическим.
Циклический маршрут, в котором отсутствуют повторяющиеся рёбра - называется циклом. М(2,2) -> (е4, е7, е5) является циклом. Очевидно, что цикл это замкнутая цепь.
Граф, в котором любые две вершины можно соединить цепью – называется связным.
Связный граф Несвязный граф
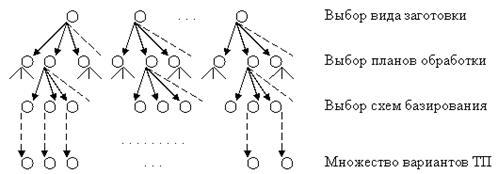
Связный граф не содержащий ни одного цикла – называется граф – дерево. Одна из вершин данного графа называется корнем. В корень не входит ни одна вершина. Подобные графы называются многоуровневыми и естественно ориентированными от корня.
Цепи, выходящие из корня – называются ветвями. Они являются изолированными. Количество рёбер должно быть на единицу меньше количества вершин.
Граф – дерево структуры технологической операции
Можно за корень принять исходн. заготовку, то каждая цепь от корня до висячей вершины даст вариант ТП. При этом вершины графа будут тех. операциями. Ориентированные графы (граф - сети)
На ориентированном графе непрерывная последовательность дуг, когда конец предыдущей совпадает с началом последующей дуги - называется путём.
Конечный путь, в котором начало первой дуги совпадает с концом последней – называется контуром графа.
Ориентированный граф, не имеющий контуров – называется граф – сеть.
Граф – сеть используется в сетевых моделях технологического проектирования.
Билет № 23