

3) Задача по теме «Работа. Мощность».
Ответы:
Любое физическое явление или процесс в окружающем нас материальном мире представляет собой закономерный ряд изменений, происходящих во времени и пространстве. Механическое движение, то есть изменение положения данного тела (или его частей) относительно других тел, – это простейший вид физического процесса. Механическое движение тел изучается в разделе физики, который называется механикой. Основная задача механики – определить положение тела в любой момент времени.
Перемещением тела ![]() называют
направленный отрезок прямой, соединяющий
начальное положение тела с его последующим
положением. Перемещение есть векторная
величина. Пройденный путьl равен
длине дуги траектории, пройденной телом
за некоторое время t.Путь – скалярная
величина. Если движение тела
рассматривать в течение достаточно
короткого промежутка времени, то вектор
перемещения окажется направленным по
касательной к траектории в данной точке,
а его длина будет равна пройденному
пути. В случае достаточно малого
промежутка времени Δt пройденный телом
путь Δl почти совпадает с модулем вектора
перемещения
называют
направленный отрезок прямой, соединяющий
начальное положение тела с его последующим
положением. Перемещение есть векторная
величина. Пройденный путьl равен
длине дуги траектории, пройденной телом
за некоторое время t.Путь – скалярная
величина. Если движение тела
рассматривать в течение достаточно
короткого промежутка времени, то вектор
перемещения окажется направленным по
касательной к траектории в данной точке,
а его длина будет равна пройденному
пути. В случае достаточно малого
промежутка времени Δt пройденный телом
путь Δl почти совпадает с модулем вектора
перемещения ![]() При
движении тела по криволинейной траектории
модуль вектора перемещения всегда
меньше пройденного пути.
При
движении тела по криволинейной траектории
модуль вектора перемещения всегда
меньше пройденного пути.
|
криволинейном движении тела. a и b – начальная и конечная точки пути. |
Для
характеристики движения вводится
понятие средней скорости:
![]()
В физике наибольший интерес представляет не средняя, а мгновенная скорость, которая определяется как предел, к которому стремится средняя скорость за бесконечно малый промежуток времени Δt:
Мгновенным
ускорением (или просто ускорением) ![]() тела
называют предел отношения малого
изменения скорости
тела
называют предел отношения малого
изменения скорости ![]() к
малому промежутку времени Δt, в течение
которого происходило изменение скорости:
к
малому промежутку времени Δt, в течение
которого происходило изменение скорости:
Нормальное ускорение
зависит от модуля скорости υ и от радиуса
R окружности, по дуге которой тело
движется в данный момент: ![]()
Вектор ![]() всегда
направлен к центру окружности. Из
рис. 1.1.5 видно, что модуль полного
ускорения равен
всегда
направлен к центру окружности. Из
рис. 1.1.5 видно, что модуль полного
ускорения равен ![]() аким
образом, основными физическими величинами
в кинематике материальной точки являются
пройденный путь l, перемещение S,
скорость V и ускорение A. Путь l
является скалярной величиной. Перемещение
S, скорость V и ускорение a –
величины векторные. Чтобы задать
векторную величину, нужно задать ее
модуль и указать направление. Векторные
величины подчиняются определенным
математическим правилам. Вектора можно
проектировать на координатные оси, их
можно складывать, вычитать и т. д.
аким
образом, основными физическими величинами
в кинематике материальной точки являются
пройденный путь l, перемещение S,
скорость V и ускорение A. Путь l
является скалярной величиной. Перемещение
S, скорость V и ускорение a –
величины векторные. Чтобы задать
векторную величину, нужно задать ее
модуль и указать направление. Векторные
величины подчиняются определенным
математическим правилам. Вектора можно
проектировать на координатные оси, их
можно складывать, вычитать и т. д.
2) В физике мы имеем дело с волнами различной природы: механическими, электромагнитными и т.д. Несмотря на отличия, эти волны имеют много общих черт. Волны, рассматриваемый параметр которых (смещение молекул, механическое напряжение, и т.д.) изменяется периодически вдоль оси распространения, называются продольными волнами. Если колебания происходят перпендикулярно оси распространения волны (как у электромагнитных волн, например), то такие волны называются поперечными.
Если взаимосвязь между частицами среды осуществляется силами упругости, возникающими вследствие деформации среды при передаче колебаний от одних частиц к другим, то волны называются упругими. К ним относятся звуковые, ультразвуковые, сейсмические и др. волны. На первой анимации изображён процесс распространения продольной упругой волны в решётке, состоящей из шариков, соединённых упругими пружинками. Каждый шарик колеблется по гармоническому закону в продольном направлении, совпадающем с направлением распространения волны. Амплитуда каждого шарика одинакова и равна A, а фаза колебаний линейно растёт с увеличением номера шарика на т.е.
x0=Asin(t); x1=Asin(t+); x2=Asin(t+2); x3=Asin(t+3); и т.д.
где -частота волны, t - время, - изменение фазы от шарика к шарику
В поперечной волне колебания происходят в направлении, перпендикулярном направлению распространения волны. Как и в случае продольных волн амплитуды колебаний всех шариков одинаковы, а фаза линейно изменяется от шарика к шарику
y0=Bsin(t); y1=Bsin(t+); y2=Bsin(t+2); y3=Bsin(t+3); и т.д.
В общем виде уравнение распространения волны может быть записано в виде: z = Acos(tkxгде z - координата, по которой происходит движение частиц, x - координата оси, вдоль которой распространяется волна, k - волновое число, равное / v, v - скорость распространения волны. Зная частоту волны и скорость её распространения, мы можем найти сдвиг фаз между соседними шариками (частицами): / v)a, где a - расстояние между шариками в решётке.
На следующей анимации изображено наложение продольной и поперечной волн равной амплитуды, сдвинутых по фазе на 90 градусов. В результате каждая масса совершает круговые движения. Уравнение движения каждого шарика может быть описано уравнением:
x=Acos(t+); y=Asin(t+)
У волн, наблюдаемых на поверхности жидкости, так называемых поверхностных волн, взаимосвязь между соседними элементами поверхности жидкости при передаче колебаний осуществляется не силами упругости, а силами поверхностного натяжения и тяжести. Колебания масс в сетке моделируют движение молекул в волне на поверхности жидкости. В случае малой амплитуды волны каждая масса движется по окружности, радиус которой убывает с расстоянием от поверхности. Массы внизу сетки находятся в покое.
Волны на поверхности жидкости не являются ни продольными, ни поперечными. Как мы можем видеть на анимации, красный шарик, моделирующий молекулу поверхности жидкости, движется по круговой траектории. Таким образом, волна на поверхности жидкости представляет собой суперпозицию продольного и поперечного движения молекул.
БИЛЕТ №25.
1)Основная задача механика. Начальные условия. Обратимость уравнений движения (прямая и обратная задача).
2)Фазовая диаграмма гармонического осциллятора.
3)Задача по теме кинематика поступательного движения.
Ответы:
1)
Основная задача механики, как неоднократно
указывается в учебнике «Физика 8», —
определять положение (координаты)
движущегося тела в любой момент времени.
Это механика обязательно должна «уметь»,
иначе она не может быть наукой о движении.
Законы движения, открытые Ньютоном, и
прежде всего второй закон Ньютона
(основной закон динамики) ![]() как
раз и позволяют решать эту задачу.
как
раз и позволяют решать эту задачу.
Второй закон Ньютона связывает силу, приложенную к телу, и вызванное силой ускорение. Но ускорение — это быстрота изменения скорости, а скорость, в свою очередь, — быстрота изменения перемещения тела. Поэтому, решив уравнение, выражающее основной закон динамики, мы узнаем о быстроте изменения координат тела, а значит, и о самих координатах в любой момент времени. Для этого кроме силы нужно знать еще начальные условия — начальные координаты и начальную скорость тела.
На
первый взгляд кажется, что уравнение
второго закона Ньютона очень простое
и что решается оно тоже просто. Однако
надо помнить, что уравнение ![]() —
векторное. Это значит, что за ним
«скрываются» три скалярных уравнения
для проекции силы и ускорения на оси
координат:
—
векторное. Это значит, что за ним
«скрываются» три скалярных уравнения
для проекции силы и ускорения на оси
координат:
 .
.
Эти уравнения в самом деле решаются легко, но только в том случае, когда проекции силы Fx, Fy и Fz постоянны, то есть когда их значения одинаковы при любых значениях координат точки, а значит, и в любой момент времени. Тогда постоянны и значения проекций ускорения ax, ay и az, движение тела, следовательно, равноускоренное, и координаты х, у и z определяются равенствами
.
Здесь x0, y0 и z0 — начальные координаты, a υ0x, υ0y и υ0z — соответствующие проекции начальной скорости на оси координат.
азовые уравнения классической механики полностью обратимы, как известно, относительно инверсии времени, и потому не отражают очевидную необратимость эволюции реальных природных систем. Основная причина такого противоестественного положения состоит на наш взгляд в следующем.
В основном уравнении динамики материальной точки dР/dt = F импульс Р = mV и сила F являются векторами, которые по определению не могут отражать необратимость течения времени. Ведь векторы изначально вводились как особая мнимая часть кватернионов, а мнимая часть как обычных комплексных чисел, использующихся, например, при расчете цепей переменного (синусоидального) тока в электротехнике, так и их четырехмерного обобщения в виде собственно кватернионов, описывает только колебательную (в общем случае «вращательную») составляющую совокупного движения! Определяемое же вторым началом термодинамики неизбежное затухание этих колебаний (вращений), с которым и связана искомая необратимость эволюции природных систем, отражается, напротив, действительной частью тех же комплексных чисел или, соответственно, скалярной частью кватернионов, попросту отсутствующей в анализируемом базовом уравнении механики. Отсюда и его неизбежная обратимость относительно инверсии времени, вполне приемлемая, впрочем, для динамики именно материальной точки – ведь последняя представляет собой по сути дела идеализированную механическую систему, по определению лишенную внутреннего движения, с которым и связаны, в конечном счете, необратимые во времени диссипативные процессы.
В отношении же динамики реальной механической системы следовало бы ожидать, напротив, что в ее основное уравнение главные динамические величины должны входить уже на сей раз в виде полных кватернионов, что позволило бы отразить все связанные с ней механические процессы, в том числе и необратимые во времени. Но на самом деле названное основное уравнение механической системы тоже носит пока чисто векторный характер, выступая сегодня в следующем хорошо известном виде: d(Р)/dt = F(e) , где P - полный векторный импульс анализируемой механической системы, а F(e) - векторная сумма действующих на нее внешних сил. Таким образом, именно потому, что главные динамические величины и в основном уравнении механической системы выражаются сегодня не полными кватернионами, как обязательно должно быть, а только мнимыми частями таковых (т. е векторами), и имеет место его анормальная обратимость при инверсии времени.
2)
Гармонический осциллятор (в классической
механике) —
это система,
которая при смещении из положения
равновесияиспытывает
действие возвращающей силы ![]() ,
пропорциональной смещению
,
пропорциональной смещению ![]() (согласно закону
Гука):
(согласно закону
Гука):
![]()
где k — положительная константа, описывающая жёсткость системы.
Если ![]() —
единственная сила, действующая на
систему, то систему
называют простым или консервативным
гармоническим осциллятором. Свободные
колебания такой системы представляют
собой периодическое движение около
положения равновесия (гармонические
колебания). Частота и амплитуда при этом
постоянны, причём частота не зависит
от амплитуды.
—
единственная сила, действующая на
систему, то систему
называют простым или консервативным
гармоническим осциллятором. Свободные
колебания такой системы представляют
собой периодическое движение около
положения равновесия (гармонические
колебания). Частота и амплитуда при этом
постоянны, причём частота не зависит
от амплитуды.
Если имеется ещё и сила трения (затухание), пропорциональная скорости движения (вязкое трение), то такую систему называютзатухающим или диссипативным осциллятором. Если трение не слишком велико, то система совершает почти периодическое движение — синусоидальные колебания с постоянной частотой и экспоненциально убывающей амплитудой. Частота свободных колебаний затухающего осциллятора оказывается несколько ниже, чем у аналогичного осциллятора без трения.
Если осциллятор предоставлен сам себе, то говорят, что он совершает свободные колебания. Если же присутствует внешняя сила (зависящая от времени), то говорят, что осциллятор испытывает вынужденные колебания.
Механическими примерами гармонического осциллятора являются математический маятник (с малыми углами отклонения), груз на пружине, торсионный маятник и акустические системы. Среди других аналогов гармонического осциллятора стоит выделить электрический гармонический осциллятор (см. LC-цепь).
БИЛЕТ №26
1) Сложение скоростей в классической механике. Вариантные и инвариантные величины.
2) Силовое поле. Консервативные и неконсервативные силы.
3)Задача на тему
Ответы
1) Относительность движения означает, что траектория, координаты, путь, перемещение, скорость при переходе из одной системы отсчёта к другой могут измениться. Закон сложения перемещений: s{век} = s0{век} + s'{век}, где s{век} - перемещение тела относительно неподвижной системы координат, s0{век} - перемещение подвижной системы координат относительно неподвижной, s'{век} - перемещение тела относительно подвижной системы координат. Закон сложения скоростей. Скорость тела в неподвижной системе отсчёта равна векторной сумме скорости тела в подвижной системе отсчёта и скорости подвижной системы отсчёта относительно неподвижной: v{век} = v0{век} + v'{век}, где где v{век} - скорость тела относительно неподвижной системы координат (абсолютная скорость), v0{век} - скорость подвижной системы координат относительно неподвижной (переносная скорость), v'{век} - скорость тела относительно подвижной системы координат (относительная скорость). При равномерном и прямолинейном движении систем отсчёта относительно друг друга ускорения тела в этих двух системах одинаковы: a{век} = a'{век}.
Инвариантные величины - величины не зависящие от выбора системы отсчёта ( неизменные, постоянные, одинаковые ), например, масса (m) Относительные величины - величины зависящие от выбора системы отсчёта.
Невозможность передать сигнал со сверхсветовой скоростью непосредственно следует из эйнштейновской формулы сложения скоростей - релятивистской формулы (от англ. relativity - относительность). Задача о сложении скоростей возникает при наличии двух движущихся одна относительно другой инерциальных (то есть движущихся равномерно и прямолинейно) систем отсчета. Состоит она в следующем: если движение некоторого тела или распространение сигнала происходит со скоростью V' в системе S', движущейся в том же направлении относительно системы S со скоростью U, то какова будет скорость V тела (сигнала) для наблюдателя, покоящегося в системе S? В классической кинематике ответ прост: V = V' + U.Например, если поезд (система S') движется относительно платформы (системы S) со скоростью U = 60 км/ч, а в поезде бежит человек в направлении движения поезда со скоростью V ' = 10 км/ч, то скорость перемещения человека относительно платформы будет V= 10 + 60 = 70 км/ч. Релятивис тская же формула сложения скоростей выглядит следующим образом: V = (V' + U)/(1 + V'U/c2). Когда величина скоростей V' и U значительно меньше c (что обычно бывает в привычных нам земных условиях), она переходит в обычную формулу классической механики. Нетрудно также убедиться, что даже если V' = c, то и V = c, то есть ни в какой инерциальной системе невозможно движение со скоростью, превышающей скорость света в вакууме.
2) СИЛОВОЕ ПОЛЕ - часть пространства (ограниченная или неограниченная), в каждой точке к-рой на помещённую туда материальную частицу действует определённая по численной величине и направлению сила, зависящая только от координат х, у, z этой точки. Такое С. п. наз. стационарным; если сила поля зависит и от времени, то С. п. наз. нестационарным; если сила во всех точках С. п. имеет одно и то же значение, т. е. не зависит ни от координат, ни от времени, С. п. наз. однородным.
Стационарное
С. п. может быть задано ур-ниями
![]()
где Fx, Fy, Fz - проекции силы поля F.
Если
существует такая ф-ция U(x, у, z),
называемая силовой ф-цией, что элементарная
работа сил поля равна полному дифференциалу
этой ф-ции, то С. п. наз. потенциальным.
В этом случае С. п. задаётся одной
ф-цией U(x, у, z), а сила F может быть
определена через эту ф-цию равенствами:
![]()
или![]() .
Условие существования силовой ф-ции
для данного С. п. состоит в том, что
.
Условие существования силовой ф-ции
для данного С. п. состоит в том, что

или![]() .
При перемещении в потенциальном С. п.
из точки M1(x1, y1, z1)в точкуМ2 (х2, у2,
z2) работа сил поля определяется
равенством
.
При перемещении в потенциальном С. п.
из точки M1(x1, y1, z1)в точкуМ2 (х2, у2,
z2) работа сил поля определяется
равенством![]() и
не зависит от вида траектории, по к-рои
перемещается точка приложения силы.
и
не зависит от вида траектории, по к-рои
перемещается точка приложения силы.
Поверхности U(x, у, z) = const, на к-рых ф-ция сохраняет пост. значение, наз. поверхностями уровня. Сила в каждой точке поля направлена по нормали к проходящей через эту точку поверхности уровня; при перемещении вдоль поверхности уровня работа сил поля равна нулю.
Примеры
потенциального С. п.: однородное поле
тяжести, для к-рого U = -mgz, где т -
масса движущейся в поле частицы, g -
ускорение силы тяжести (ось z направлена
вертикально вверх); ньютоново поле
тяготения, для к-рого U = km/r, где r =![]() -
расстояние от центра притяжения, k -
постоянный для данного поля коэффициент.
Вместо силовой ф-ции в качестве
характеристики потенциального С. п.
можно ввести потенциальную
энергию П,
связанную с U зависимостью П(х,
у, z)= = -U(x, у, z). Изучение движения частицы
в потенциальном С. п. (при отсутствии
других сил) существенно упрощается, т.
к. в этом случае имеет место закон
сохранения механич. энергии, позволяющий
установить прямую зависимость между
скоростью частицы и её положением в С.
п. с. м. Тарг. СИЛОВЫЕ ЛИНИИ- семейство
кривых, характеризующих пространственное
распределение векторного поля сил;
направление вектора поля в каждой точке
совпадает с касательной к С. л. Т. о.,
ур-ния С. л. произвольного векторного
поля А (х, у, z) записываются в виде:
-
расстояние от центра притяжения, k -
постоянный для данного поля коэффициент.
Вместо силовой ф-ции в качестве
характеристики потенциального С. п.
можно ввести потенциальную
энергию П,
связанную с U зависимостью П(х,
у, z)= = -U(x, у, z). Изучение движения частицы
в потенциальном С. п. (при отсутствии
других сил) существенно упрощается, т.
к. в этом случае имеет место закон
сохранения механич. энергии, позволяющий
установить прямую зависимость между
скоростью частицы и её положением в С.
п. с. м. Тарг. СИЛОВЫЕ ЛИНИИ- семейство
кривых, характеризующих пространственное
распределение векторного поля сил;
направление вектора поля в каждой точке
совпадает с касательной к С. л. Т. о.,
ур-ния С. л. произвольного векторного
поля А (х, у, z) записываются в виде:
![]()
Плотность С. л. характеризует интенсивность (величину) силового поля. Область пространства, ограниченная С. л., пересекающими к--л. замкнутую кривую, наз. силовой трубкой. С. л. вихревого поля замкнуты. С. л. потенциального поля начинаются на источниках поля и заканчиваются на его стоках (источниках отрицат. знака).
Консервативные и неконсервативные силы.
В современной физике различают четыре вида взаимодействий:
I. гравитационная, или взаимодействие, обусловленное всемирным тяготением;
II. электромагнитная, которая осуществляется через электрические и магнитные поля;
III. сильная или ядерная, которая обеспечивает связь частиц в атомном ядре;
IV. слабая, которая отвечает за численные процессы распада элементарных частиц.
Мы с вами в рамках классической механики будет иметь дело из гравитационными силами и магнитными силами, а также с упругими силами и силами трения. Два последних вида сил определяются характером взаимодействия между молекулами вещества. Силы взаимодействия между молекулами имеют электромагнитное происхождение. Следовательно, упругие силы и силы трения являются по своей природе электромагнитными.
Силы, которые рассматриваются в физике разделяются на консервативные и неконсервативные. Силы, работа которых не зависит от формы траектории, а определяется только начальным и конечным размещением тела в пространстве, называют консервативными, или потенциальными. К ним принадлежат:
- силы притяжения
- силы упругости
- электростатические силы взаимодействия между заряженными телами.
Силы будут консервативными при условии когда в системе нет перехода механического движения в другие формы движения материи, или превращения других форм движения в механический.
Силы, что не принадлежат к консервативным, называют неконсервативными:
- силы трения, которые возникают при скольжении одного тела по поверхности другого
- силы сопротивления, которых испытывает тело, двигаясь в жидкой или газообразной среде.
Эти силы зависят не только от формы тел, но и от их скорости. Они направлены всегда против направления скорости, потому работа сил трения всегда отрицательна.
Гравитационные и электромагнитные силы являются фундаментальными - их нельзя возвести к другим, более простых сил. Упругие силы и силы трения не являются фундаментальными. Законы фундаментальных сил достаточно простые. Убедиться в этом можно из примера.
Вспомним определение силы - это мера внешнего действия на тело, которое возникает в процессе его взаимодействия с другим телом. Это физическая величина введена для характеристики передаваемости движению от одного тела к другому, следовательно, изменения движения взаимодействующих тел. Силу нельзя рассматривать оторвано от материи и ее движения.
Если под действием нескольких сил тело хранит свое состояние спокойствия, или равномерного прямолинейного движения, то такую систему действующих сил будем называть уравновешенной, или эквивалентной нулю.
Результаты действия силы в разных практических примерах более легко объяснить, если различать вслед за Ньютоном статичные и динамические проявления силы. Поэтому различают статичный и динамический способы измерения силы.
Результатами статичного проявления силы является давление на тела, которые препятствуют движению, и их деформация. Понятно, что сила, которая оказывается статично, всегда вызывает равную ей по величине и противоположную за направлением реакцию опоры - силу упругой деформации. Результатом динамического проявления силы являются ускорения - тангенциальное или нормальное. В таком случае силу можно определить по второму закону Ньютона. Но почти везде силы обнаруживают частичного как статичные, так и динамические проявления.
Следовательно, к консервативным силам относят силы притяжения, силы упругости и силы электростатического взаимодействия; к неконсервативным соответственно - силы трения и силы сопротивления.
БИЛЕТ №27
1)Поступательное, вращательное и плоское движения твердых тел.
2)Полная механическая энергия. Закон изменения полной механической энергии.
3)Задача по теме «Момент инерции».
Ответы:
1) ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
В твердом теле скорости точек распределяются таким образом, что проекции скоростей двух точек на прямую, их соединяющую, равны между собой (кинематическое определение твердого тела).
Положение твердого тела в общем случае определяется шестью параметрами; в частных случаях, когда на движение тела наложены ограничения, число параметров соответственно уменьшается.
Поступательным движением твердого тела называется такое его движение, при котором всякая прямая, неизменно связанная с телом, перемещается параллельно самой себе. Для этого достаточно, чтобы две непараллельные прямые, связанные с телом, перемещались параллельно самим себе. При поступательном движении все точки тела описывают одинаковые, параллельно расположенные траектории и имеют в любой момент времени одинаковые скорости и ускорения. Таким образом, поступательное движение тела определяется движением одной его точки О.
Вращательным называют такое движение твердого тела, при котором две какие-нибудь точки принадлежащие телу, остаются во все время движения неподвижными. Прямая, проходящая через эти точки, называется осью вращения. Все точки лежащие на оси так же неподвижны.
Чтобы
определить положение вращающегося
тела, введем две плоскости, проходящие
через ось вращения (рис. 50 ![]() )
А - плоскость неподвижная; В - плоскость
связанная с телом и вращающаяся с ним;
DE - ось вращения, совпадающая с осью z.
)
А - плоскость неподвижная; В - плоскость
связанная с телом и вращающаяся с ним;
DE - ось вращения, совпадающая с осью z.
Теперь
в любой момент времени положение тела
будет определяться углом ![]() между
плоскостями А и В или углом поворота
тела, положительным, если вращение
происходит против часовой стрелки, и
отрицательным в противном случае. Закон
вращательного движения
между
плоскостями А и В или углом поворота
тела, положительным, если вращение
происходит против часовой стрелки, и
отрицательным в противном случае. Закон
вращательного движения
![]()
Угол поворота обычно измеряют в радианах.
Основными
кинематическими характеристиками
вращательного движения твердого тела
являются его угловая скорость ![]() и
угловое ускорение
и
угловое ускорение ![]() .
.
Если
за промежуток времени ![]() тело
совершает поворот на угол
тело
совершает поворот на угол ![]() ,
то средняя угловая скорость будет
численно равна
,
то средняя угловая скорость будет
численно равна
![]()
Угловой
скоростью тела в данный момент t
называется величина, к которой стремится
средняя угловая скорость ![]() ,
если
,
если ![]() стремится
к нулю.
стремится
к нулю.
![]()
Угловая скорость твердого тела является первой производной от угла поворота по времени.
Размерность:
[радиан/время]; [1/время]; [1/сек =![]() ].
].
Угловую
скорость можно изображать вектором.
Вектор угловой скорости ![]() направляют
по оси вращения в ту сторону, откуда
вращение видно против хода часовой
стрелки.
направляют
по оси вращения в ту сторону, откуда
вращение видно против хода часовой
стрелки.
Если угловая скорость не является постоянной величиной, то вводят еще одну характеристику вращения - угловое ускорение.
Угловое ускорение характеризует изменение угловой скорости тела с течением времени.
Если
за промежуток времени ![]() угловая
скорость получает приращение
угловая
скорость получает приращение ![]() ,
то среднее угловое ускорение равно
,
то среднее угловое ускорение равно
![]()
Угловым
ускорением твердого тела в данный
момент времени t называется величина к
которой стремится ![]() при
при ![]() стремящемся
к нулю
стремящемся
к нулю

Как
вектор, угловое ускорение ![]() направлен
так же, как и
направлен
так же, как и ![]() ,
вдоль оси (рис. 51
,
вдоль оси (рис. 51 ![]() )
)
Если
направление ![]() и
и ![]() совпадает,
то вращение ускоренное, если противоположно,
то замедленное.
совпадает,
то вращение ускоренное, если противоположно,
то замедленное.
Если ![]() =
const, то вращение будет равномерным.
=
const, то вращение будет равномерным.
Найдем
его закон. Так как ![]() ,
то, интегрируя при начальных условиях
t = 0,
,
то, интегрируя при начальных условиях
t = 0, ![]() =
0, получаем
=
0, получаем
![]()
Это и есть закон равномерного вращения.
В технике
вращение характеризуют оборотами в
минуту n [об/мин]. Угловая скорость ![]() и
обороты в минуту n связаны следующим
соотношением:
и
обороты в минуту n связаны следующим
соотношением:
![]()
Если
угловое ускорение тела все время остается
постоянным, то вращение называют
равнопеременным (![]() =
const).
=
const).
Найдем
закон вращения, если в начальный момент
t = 0, ![]() =
0 и
=
0 и ![]() :
:
![]() ,
интегрируя получаем
,
интегрируя получаем
![]()
Подставляем
вместо ![]() правую
часть (9.2.3), разделяем переменные и, вновь
интегрируя, имеем
правую
часть (9.2.3), разделяем переменные и, вновь
интегрируя, имеем
Это закон равнопеременного вращения.
Если ![]() и
и ![]() имеют
один знак, то вращение равноускоренное.
Если знаки разные - равнозамедленное.
(рис. 51, а,б). Плоским (плоскопараллельным)
назыв. такое движение, при котором все
его точки перемещаются параллельно
некоторой неподвижной плоскости.Уравнения
плоского движения: xA= f1(t), yA= f2(t), j =
f3(t), точка А назыв. полюсом. Плоское
движение тв.тела слагается из
поступательного движения, при котором
все точки тела движутся так же, как полюс
(А),и из вращательного движения вокруг
этого полюса.
имеют
один знак, то вращение равноускоренное.
Если знаки разные - равнозамедленное.
(рис. 51, а,б). Плоским (плоскопараллельным)
назыв. такое движение, при котором все
его точки перемещаются параллельно
некоторой неподвижной плоскости.Уравнения
плоского движения: xA= f1(t), yA= f2(t), j =
f3(t), точка А назыв. полюсом. Плоское
движение тв.тела слагается из
поступательного движения, при котором
все точки тела движутся так же, как полюс
(А),и из вращательного движения вокруг
этого полюса.
Полная механическая энергия тела не изменяется. Энергия только превращается из одного вида в другой. Полная механическая энергия тела, на которое не действуют силы трения и сопротивления, в процессе его движения остается неизменной. Полной механической энергией тела называют сумму его кинетической и потенциальной энергий. Сумма кинетической и потенциальной энергий образует полную механическую энергию тела. Абсолютно упругим называется такой удар, при котором полная механическая энергия тел сохраняется.
Какие причины могут изменить полную механическую энергию?
Р ассмотрим
систему тел, в которой действуют следующие
силы:
ассмотрим
систему тел, в которой действуют следующие
силы:
|
|
fпот.с. - внутренняя потенциальная сила; |
|
|
fнепот.с. - внутренняя непотенциальная сила; |
|
|
Fвнеш.с. - внешняя сила. |
Изменение кинетической энергии системы равно суммарной работе всех сил, действующих на тела этой системы (см. тему 3):
DEк = Aпот.с.+ Aнепот.с.+ Aвнеш.с. (1)
Изменение потенциальной энергии системы равно работе потенциальных сил с обратным знаком (см. тему 4):
DEп = - Aпот.с. (2)
Очевидно, что изменение полной механической энергии равно:
DE = DEп + DEк (3)
Из уравнений (1-3) получим, что изменение полной механической энергии равно суммарной работе всех внешних сил и внутренних непотенциальных сил. DEк = Aвнеш.с.+ Aнепот.с. (4)
Формула (4) представляет из себя закон изменения полной механической энергии системы тел.
Существует 2 причины изменения энергии системы:
|
|
действие внешних сил; |
|
|
действие внутренних непотенциальных сил. |
Очевидно, что полная механическая энергия замкнутой системы, в которой действуют только потенциальные силы, не изменяется при любых перемещениях тел. Это утверждение называется законом сохранения механической энергии.
БИЛЕТ№28
1)Вращательное движение. Угловая скорость. Угловое ускорение.
2)Уравнение гармонических колебаний на примере математического маятника.
3)Задача по теме «Энергия».
Ответы:
1) Движение материальной точки или поступательное движение тела характеризуют в зависимости от времени линейные величины s (путь, расстояние), v (скорость) и а (ускорение) с его составляющими at и an.
Вращательное движение тела в зависимости от времени t характеризуют угловые величины: φ (угол поворота в радианах), ω (угловая скорость в рад/сек) и ε (угловое ускорение в рад/сек2).
Закон вращательного движения тела выражается уравнением φ = f (t).
Угловая скорость – величина, характеризующая быстроту вращения тела, определяется в общем случае как производная угла поворота по времени ω = dφ/dt = f' (t).
Угловое ускорение – величина, характеризующая быстроту изменения угловой скорости, определяется как производная угловой скорости ε = dω/dt = f'' (t).
Приступая к решению задач на вращательное движение тела, необходимо иметь в виду, что в технических расчетах и задачах, как правило, угловое перемещение выражается не в радианах φ, а в оборотах φоб.
Поэтому необходимо уметь переходить от числа оборотов к радианному измерению углового перемещения и наоборот.
Так как один полный оборот соответствует 2π рад, то φ = 2πφоб и φоб = φ/(2π).
Угловая скорость в технических расчетах очень часто измеряется в оборотах, произведенных в одну минуту (об/мин), поэтому необходимо отчетливо уяснить, что ω рад/сек и n об/мин выражают одно и то же понятие – скорость вращения тела (угловую скорость), но в различных единицах – в рад/сек или в об/мин.
Переход от одних единиц угловой скорости к другим производится по формулам ω = πn/30 и n = 30ω/π.

При вращательном движении тела все его точки движутся по окружностям, центры которых расположены на одной неподвижной прямой (ось вращающегося тела). Очень важно при решении задач, приведенных в этой главе, ясно представлять зависимость между угловыми величинами φ, ω и ε, характеризующими вращательное движение тела, и линейными величинами s, v, at и an, характеризующими движение различных точек этого тела (рис 205).
Если R – расстояние от геометрической оси вращающегося тела до какой-либо точки А (на рис. 205 R=OA), то зависимость между φ – углом поворота тела и s – расстоянием, пройденным точкой тела за то же время, выражается так: s = φR.
Зависимость между угловой скоростью тела и скоростью точки в каждый данный момент выражается равенством v = ωR.
Касательное ускорение точки зависит от углового ускорения и определяется формулой at = εR.
Нормальное ускорение точки зависит от угловой скорости тела и определяется зависимостью an = ω2R.
При решении задачи, приведенной в этой главе, необходимо ясно понимать, что вращением называется движение твердого тела, а не точки. Отдельно взятая материальная точка не вращается, а движется по окружности – совершает криволинейное движение.
2)???????
Билет № 29
1)Сила инерции. Эквивалентность сил инерции и гравитации. Равенство гравитационной и инертной масс. Центробежная сила инерции.
2)Упругое столкновение двух частиц. Нецентральный удар.
3)Задача по теме «Кинематика».
Ответы:
1) Силы
инерции — силы, обусловленные
ускоренным движением неинерциальной
системы отсчета (НСО) относительно
инерциальной системы отсчета (ИСО).
Основной закон динамики для неинерциальных
систем отсчета: ![]() ,
где
,
где
![]() — сила, действующая на тело со стороны
других тел;
— сила, действующая на тело со стороны
других тел;
![]() — сила инерции, действующая на тело
относительно поступательно движущейся
НСО.
— сила инерции, действующая на тело
относительно поступательно движущейся
НСО. ![]() —
ускорение НСО относительно ИСО. Она
появляется, например, в самолете при
разгоне на взлетной полосе;
—
ускорение НСО относительно ИСО. Она
появляется, например, в самолете при
разгоне на взлетной полосе;
![]() —
центробежная сила инерции, действующая
на тело относительно вращающейся
НСО.
—
центробежная сила инерции, действующая
на тело относительно вращающейся
НСО. ![]() —
угловая скорость НСО относительно
ИСО,
—
угловая скорость НСО относительно
ИСО, ![]() —
расстояние от тела до центра вращения;
—
расстояние от тела до центра вращения;
![]() — кориолисова сила инерции, действующая
на тело, движущееся со скоростью
— кориолисова сила инерции, действующая
на тело, движущееся со скоростью ![]() относительно
вращающейся НСО.
относительно
вращающейся НСО. ![]() — угловая скорость НСО относительно
ИСО (вектор направлен вдоль оси вращения
в соответствии с правилом правого
винта). Принцип эквивалентности сил
гравитации и инерции — эвристический
принцип, использованный Альбертом
Эйнштейном при выводе общей теории
относительности. Один из вариантов его
изложения: «Силы гравитационного
взаимодействия пропорциональны
гравитационной массе тела, силы инерции
же пропорциональны инертной массе тела.
Если инертная и гравитационная массы
равны, то невозможно отличить, какая
сила действует на данное тело —
гравитационная или сила инерции.»
— угловая скорость НСО относительно
ИСО (вектор направлен вдоль оси вращения
в соответствии с правилом правого
винта). Принцип эквивалентности сил
гравитации и инерции — эвристический
принцип, использованный Альбертом
Эйнштейном при выводе общей теории
относительности. Один из вариантов его
изложения: «Силы гравитационного
взаимодействия пропорциональны
гравитационной массе тела, силы инерции
же пропорциональны инертной массе тела.
Если инертная и гравитационная массы
равны, то невозможно отличить, какая
сила действует на данное тело —
гравитационная или сила инерции.»
Центробежная сила инерции - сила, с которой связь действует на материальную точку, равномерно движущуюся по окружности, в системе отсчета, связанной с этой точкой. Центробежная сила инерции приложена к движущейся материальной точке и направлена по радиусу вращения от центра.
2) Ударом (или столкновением) принято называть кратковременное взаимодействие тел, в результате которого их скорости испытывают значительные изменения. Абсолютно упругим ударом называется столкновение, при котором сохраняется механическая энергия системы тел.
Во многих случаях столкновения атомов, молекул и элементарных частиц подчиняются законам абсолютно упругого удара.
При абсолютно упругом ударе наряду с законом сохранения импульса выполняется закон сохранения механической энергии. При нецентральном упругом соударении скорости частиц (шаров) до и после столкновения не направлены по одной прямой.
Частным случаем нецентрального упругого удара может служить соударение двух бильярдных шаров одинаковой массы, один из которых до соударения был неподвижен, а скорость второго была направлена не по линии центров шаров
БИЛЕТ №30.
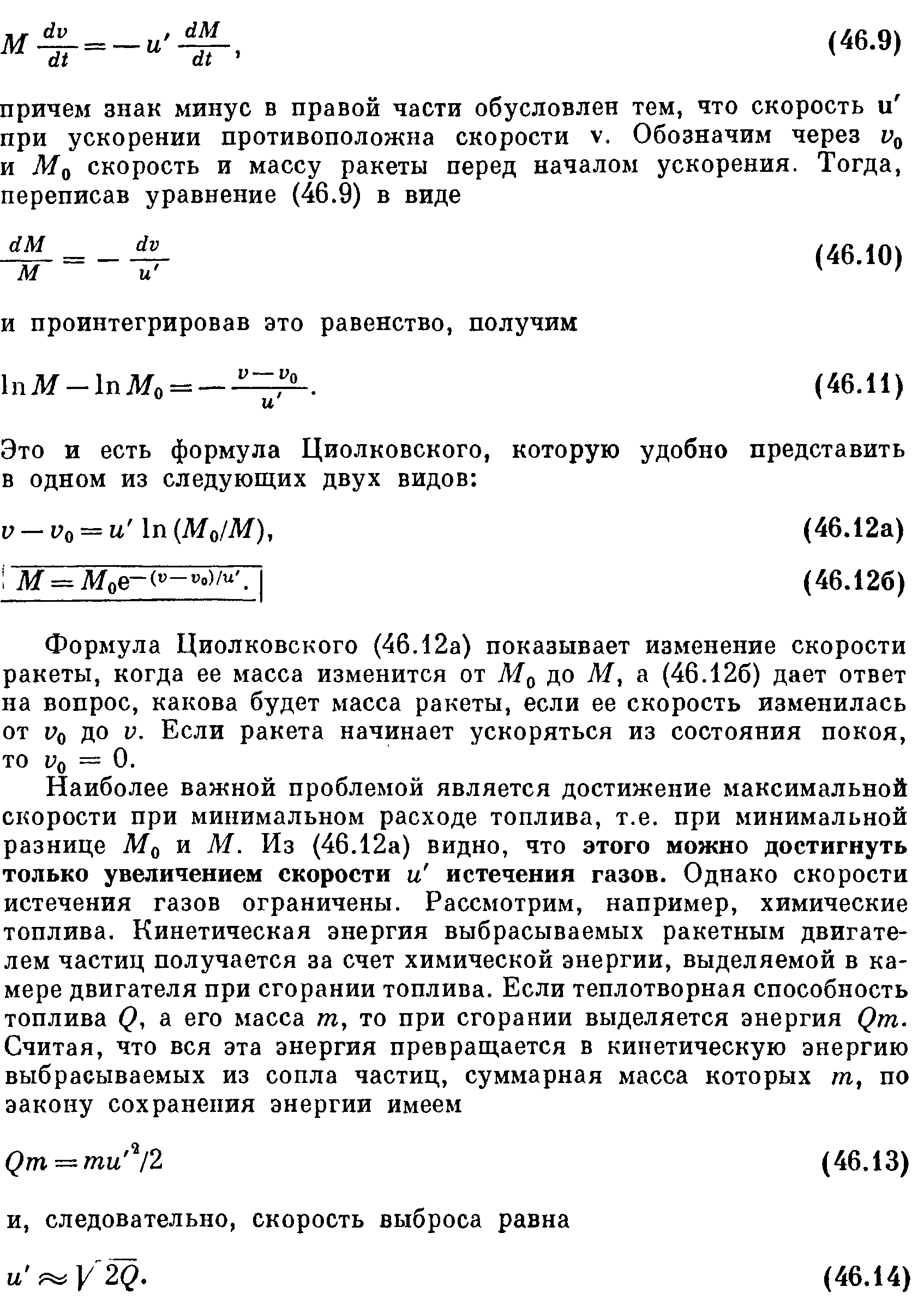
1)Нерелятивистская ракета. Формула Циолковского.
2)Полная механическая энергия. Закон сохранения механической энергии.
3)Задача по теме «Кинематика вращательного движения».
О тветы:1)
тветы:1)
 Формула
Циолковского: Рассмотрим ускорение
ракеты в прямолинейном движении, считая,
что скорость выбрасываемых газов
относительно постоянная.
Уравнение(46.6)запишется так:
Формула
Циолковского: Рассмотрим ускорение
ракеты в прямолинейном движении, считая,
что скорость выбрасываемых газов
относительно постоянная.
Уравнение(46.6)запишется так:
Однако это сильно завышенное значение, потому что мы не учли что часть энергии, образовавшейся при сгорании, теряется на излучение, нагревание стенок двигателя и т.д. Кроме того выбрасываемые из ракетного двигателя частицы не движутся все строго в одном направлении, а расходятся в пределах некоторого конуса. Это снижает величину достижимых значений u’.
2) Сумма кинетической и потенциальной энергий системы тел называется полной механической энергиейсистемы. E = Ep + Ek.
Учитывая, что при совершении работы A = DEk и, одновременно, A = - DEp, получим: DEk = - DEp или
D(Ek + Ep)=0 - изменение суммы кинетической и потенциальной энергий (т.е. изменение полной механической энергии) системы равно нулю. DEk = - DEp
Значит, полная энергия системы остается постоянной:
E = Ep + Ek = const. В замкнутой системе, в которой действуют только консервативные силы, механическая энергия сохраняется. (Или: полная механическая энергия системы тел, взаимодействующих силами упругости и гравитации, остается неизменной при любых взаимодействиях внутри этой системы).
E = Ep + Ek = const
Например,
для тела, движущегося под действием
силы тяжести (падение; тело, брошенное
под углом к горизонту, вертикально вверх
или движущееся по наклонной плоскости
без трения):  .
.
БИЛЕТ №31.
1)Работа силы. Механическая работа.
2)Момент импульса. Закон сохранения момента импульса.
3)Задача по теме «Кинематика поступательного движения».
Ответы:
РАБОТА силы - мера действия силы, зависящая от численной величины и направления силы F и от перемещения s точки ее приложения. Если сила F численно и по направлению постоянная, а перемещение прямолинейно, то работа A = F?s?cos ?, где ? - угол между направлениями силы и перемещения. “Работа результирующей всех сил, действующих на частицу, идет на приращение кинетической энергии частицы“. Однако в следующем параграфе этого же учебника работа силы трактуется уже, как причина приращения потенциальной энергии, из чего можно сделать вывод, что работа сил идет на приращение любого вида энергии. Что именно понимается под видами энергии, показано на странице, посвященной формам и видам энергии. В физике "механической работой" называют работу какой-нибудь силы ( силы тяжести, упругости, трения и т.д.) над телом, в результате действия которой тело перемещается. Часто слово "механическая" просто не пишется. Иногда можно встретить выражение " тело совершило работу", что в принципе означает "сила, действующая на тело, совершила работу". Если под действием силы тело перемещается, то совершается механическая работа. Говорят, что тело совершает работу. А точнее будет так: работу совершает сила, действующая на тело. Работа характеризует результат действия силы. Cилы, действующие на человека совершают над ним механическую работу, а в результате действия этих сил человек перемещается. Работа совершается, если соблюдаются одновременно 2 условия: на тело действует сила и оно перемещается в направлении действия силы. Работа не совершается (т.е. равна 0 ),если: 1. Сила действует, а тело не перемещается. Например: мы действуем с силой на камень, но не можем его сдвинуть. 2. Тело перемещается, а сила равна нулю, или все силы скомпенсированы ( т.е. равнодействующая этих сил равна 0 ). Например: при движении по инерции работа не совершается. 3. Направление действия силы и направление движения тела взаимно перпендикулярны. Работа может быть положительной и отрицательной. 1. Если направление силы и направление движения тела совпадают, совершаетсяположительная работа. 2. Если направление силы и движения тела противоположны, совершаетсяотрицательная работа. Если на тело действует несколько сил, то полная работа всех сил равна работе результирующей силы. Единицы работы: В честь английского ученого Д.Джоуля единица измерения работы получила название 1 Джоуль. В международной системе единиц (СИ): [А] = Дж = Н • м 1Дж = 1Н • 1м Механическая работа равна 1 Дж, если под действием силы в 1 Н тело перемещается на 1 м в направлении действия этой силы. Сердце человека за одно сокращение совершает приблизительно 1 Дж работы, что соответствует работе, совершенной при поднятии груза массой 10 кг на высоту 1 см.
2) МОМЕНТ ИМПУЛЬСА
момент количества движения, кинетический момент, одна из важнейших динамич. хар-к тела или системы тел. Различают М. и. относительно полюса (точки) и относительно оси. М. и. L материальной точки относительно полюса О равен векторному произведению радиус-вектора r, проведённого в эту точку из полюса О, на вектор mv импульса материальной точки (т - её масса, v - скорость): L == [r, mv]. Вектор L направлен перпендикулярно к плоскости, проходящей через векторы r и mv, так что из его конца вращение от r к mv по кратчайшему расстоянию видно происходящим против хода часовой стрелки, (см. рис.). L = mvr sina, где a - угол между векторами г я mv.
М. и. L тела или системы тел относительно полюса равен интегралу (геом. сумме) М. и. относительно того же полюса всех малых частей тела (системы), рассматриваемых как матер. точки с массами dm и с их r и v: L =интеграл [r, v] dm.
М. и. тела (системы) относительно к.-л. оси а, проходящей Через полюс О, наз. скалярная величина La, к-рая равна проекции на ось а вектора L. M. и. тела (системы) относительно любого полюса, лежащего на оси а (величина La), не зависит от местоположения полюса на оси а. Если тело (система) вращается вокруг оси а с угловой скоростью w, то La = Jaw, где Ja - момент, инерции тела (системы) относительно оси а, w - проекция на ось а вектора си.
2)
Для замкнутой системы тел момент внешних
сил всегда равен нулю, так как внешние
силы вообще не действуют на замкнутую
систему.
Поэтому ![]() ,
то есть
,
то есть
![]() или
или ![]()
Закон сохранения момента импульса: момент импульса замкнутой системы тел относительно любой неподвижной точки не изменяется с течением времени. Это один из фундаментальных законов природы. Аналогично для замкнутой системы тел, вращающихся вокруг оси z:
![]() отсюда
отсюда ![]() или
или  .
.
Если момент внешних сил относительно неподвижной оси вращения тождественно равен нулю, то момент импульса относительно этой оси не изменяется в процессе движения. Момент импульса и для незамкнутых систем постоянен, если результирующий момент внешних сил, приложенных к системе, равен нулю. Очень нагляден закон сохранения момента импульса в опытах с уравновешенным гироскопом – быстро вращающимся телом, имеющим три степени свободы.
Используется гироскоп в различных навигационных устройствах кораблей, самолетов, ракет (гирокомпас, гирогоризонт). Один из примеров навигационного гироскопа изображен на рисунке 6.10. Именно закон сохранения момента импульса используется танцорами на льду для изменения скорости вращения. Или еще известный пример – скамья Жуковского.
Зако́н сохране́ния моме́нта и́мпульса (закон сохранения углового момента) — векторная сумма всех моментов импульса относительно любой оси для замкнутой системы остается постоянной в случае равновесия системы. В соответствии с этим, момент импульса замкнутой системы относительно любой неподвижной точки не изменяется со временем.