

Условия проверки по запуску
Кu2=Mп>Мпр+0,25Мн
Кu– коэффициент учитывающий возможность отключения напряжения питающей сети
Мп - пусковой момент двигателя
Мтр – момент трогания рабочей машины, зависящий от мощности рабочей машины и от ее вида
Мн – номинальный момент
Мтр = Рр.м. / н; Мн = Рн /н; Мп =пМн;
п - кратность пускового момента
При запуске происходит переходной процесс d/dt0, т.е. скорость изменяется во времени, при этом Мд>Мр.м., двигатель разгоняется. Это заложено в коэффициенте 0,25.
Условия проверки по перегрузочной способности.
=Мmax/Mн;<кат
Выбор двигателя при переменной нагрузке
Переменная нагрузка может описываться двумя видами графиков.
1. График регулярно чередующейся нагрузки.
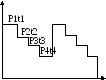
![]()
2. График регулярно чередующейся нагрузки.
![]()
Pрасчетная=к Рср = (1,1…1,5)Рср
Выбираем двигатель из условия Рном>Ррасчет, и проверяем его по нагреву
Методы проверки двигателей по нагреву.
1. метод средних потерь по нагреву.
Средние (эквивалентные потери – постоянные по величине потери при которых в двигателе за рабочий период ( цикл продолжительности нагрузки) выделяется такое же количество тепла как и при реально существующих переменных по величине потерях.
![]()
Рном>Рср.
2. Метод среднеквадротических величин.
В оснву данного метода заложен метод средних потерь с учетом следующих моментов:
Рср=Рпост+Рперем.
Рперем=I2R
Вводится понятие среднеквадротических величин.
Iср.кв. – среднеквадротический (эквивалентный) ток - постоянный по величине который протекает по обмотке двигателя, выделяет такое же количество тепла как и реально протекающий ток за все периоды различной нагрузки.
![]()
Аналогично вводятся понятия эквивалентного момента и мощности.
![]()
![]()
Iэкв=Iср.кв.; Рэкв=Р ср.кв.; Мэкв = М ср.кв.
Условия выбора двигателя по эквивалентным величинам Iэкв, P экв, M экв.
Кроме того нагрузка может изменяться по следующим графикам:

Определение эквивалентных величин для:
Прямоугольника: Iэкв=I2t
Треугольника: Iэкв=(1/3)I2t
Трапеции: Iэкв=(1/3)(I21+I12+I23)t
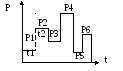
Пример определения эквивалентного тока для графика переменной нагрузки:



![]()
Тема 11 Автоматическое управление электроприводами Система автоматического управления электроприводом сау
Основное понятие и положение.
1. Управлением электроприводом называется пуск в работу, регулирование скорости, изменение напряжения, торможение, поддержание постоянства мощности, момента, скорости или других показателей обеспечивающих нормальный режим работы.
Управление может быть ручным, когда операции по его осуществлению осуществляются оператором в ручную.
2. Автоматизированное управление – оператор подает первичный сигнал или импульс который обеспечивает сигнал на включение прочих аппаратов.
3. Автоматическое управление – оператор лишь следит за управлением процесса, все операции происходят автоматически.
САУЭ:
Системы управлением по разомкнутому циклу
По замкнутому циклу
Комбинированный
Регулирование по разомкнутому циклу характеризуется отсутствием всякого изменения и контроля регулируемой величины. Регулирующее значение в такой системе не зависит от регулируемого.
Системы регулирования могут изменяться непрерывно или дискретно САУЭП.
1. аналоговые
2. дискретные
импульсные
цифровые
релейные
Если при управлении необходимо выполнять стабилизации параметров то системы называют следящими или системами программного управления.
По роду усилительных элементов разделяют системы:
С серводвигательным управлением, где в качестве управляющего устройства применяют вспомогательный двигатель.
С релейно-контакторным управлением в котором управляющим устройством являются электромеханические контакторы и реле.
С бесконтактным управлением – управление устройства осуществляется бесконтактными усилителями.
С электромагнитным управлением - в качестве управляющих устройств применяют электромашинные усилители.
По влиянию нагрузки на регулируемую величину различают три вида систем:
Статические
Астатические
Смешанные
Статическими называют системы у которых установившееся значение регулируемой величины зависит от нагрузки.
Астатические – значение регулируемой величины не зависит от нагрузки.