Matematika_shpory
.doc|
Квадратная матрица порядка n – таблица чисел, состоящая из n строк и n столбцов. Определитель матрицы (детерминатор) – число, составленное из элементов матрицы по определенному правилу. Минор элемента aik и определителя матрицы А – определитель, полученный из А путем вычеркивания i-ой строки и k-столбца (Mik), т.е. определитель порядка n-1. Алгебраическое дополнение элемента aik – соответствующий минор Mik, умноженный на знаковый множитель. Aik = (-1)i+k • Mik
Свойства определителя:
Теорема разложения определителя: всякий определитель можно представить как сумму элементов любой строки или столбца, умноженных на соответствующие алгебраические дополнения А = ∑ aik • Aik
|
Решение системы линейных уравнений – совокупность из n чисел xik, которые обращают ее в верные равенства. Решить систему – выяснить совместна она или нет. Совместная система – система алгебраических уравнений, имеющая хотя бы одно решение. Теорема Кронекера-Капелли: система уравнений совместна тогда, когда ранг расширенной системы равен рангу основной системы. Определенная система – совместная система, имеющая единственное решение. Неопределенная система – совместная система, имеющая более одного решения. Эквивалентные системы – системы, имеющее одно и тоже общее решение. Ранг матрицы – число, характеризующее наибольший порядок миноров данной матрицы, отличных от нуля. Теорема 1: Если ранг совместной системы линейных уравнений равен числу неизвестных этой системы, то система имеет единственное решение. Теорема 2: Если ранг совместной системы меньше числа неизвестных, то система имеет бесчисленное множество решений. Формулы Крамера – решение систем линейных уравнений в виде отношения двух определителей. xi = i / Метод Гаусса: путем элементарных преобразований представить расширенную матрицу системы уравнений в треугольной форме, когда все элементы ниже главной диагонали обращены в нуль. |
Действия над матрицами:
Единичная матрица – матрица, включающая 1 по главной диагонали и 0 в остальных местах. Обратная матрица: матрица А-1 будет обратной для матрицы А, если А-1 • А = Е. Теорема: для того, чтобы квадратная матрица А имела обратную, необходимо и достаточно, чтобы она была невырожденной, т.е. А ≡ ≠ 0.
Матричная запись:
|
||||||||||||
|
Вектор – направленный отрезок, т.е. отрезок прямой, характеризующийся длинной и направлением. Коллинеарный вектор – вектор, расположенный на параллельных прямых. Чтобы вектор а был коллинеарен вектору в нужно число к, удовлетворяющее условию а = кв. Компланарный вектор – вектор, расположенный в параллельных плоскостях. Линейные действия над векторами:
Исследование линейной зависимости векторов:
теорема: любой вектор m на плоскости можно представить в виде линейной комбинации двух неколлинеарных векторов а и в: m = ха + ув
теорема: любой вектор m в пространстве можно представить в виде линейной комбинации трех некомпланарных векторов а, в, с: m = ха + ув + zc.
|
Базис на плоскости – два любые неколлинеарные вектора, взятые в определенном порядке. Базис в пространстве – три любые некомпланарных вектора, взятые в определенном порядке. Координаты вектора в базисе – коэффициенты разложения этого вектора по векторам базиса: m = {k1, k2, k3}. Прямоугольная система координат – совокупность точки О и ортонормированного базиса i, j, k. Орты i, j, k имеют единичную длину, взаимно перпендикулярны и определяют направление осей x, y, z. Координаты точки М – проекции точки на оси координат (x, y, z). Геометрический смысл координат вектора – это проекция вектора на оси координат. Направляющие косинусы вектора а – косинусы углов между вектором и осями координат и равны отношению прилегающего катета к гипотенузе, т.е. отношению координат вектора к его модулю. Проекция точки А на ось – основание перпендикуляра АА’, опущенного из точки А на ось. Свойства проекции:
Линейные действия над векторами:
|
Скалярное произведение векторов а и в – число, равное произведению длин векторов на косинус угла между ними. ав = |а| |в| Cos . Свойства скалярного произведения:
Координатное представление скалярного представления: вектора а = {аx аy аz} и в = {вx вy вz} разложим по ортам, перемножим скалярно ав = (аxi аyj аzk)(вxi вyj вzk), получим ав = аxвx + аyвy + аzвz Угол между векторами: Cos = ав / |а| |в|. Условие а || в: (коллинеарность) а = kв или аx/вx = аy/вy = аz/вz. Условие а в: ав = 0 или аxвx + аyвy + аzвz = 0.
Векторное произведение векторов а и в – третий вектор, который:
Свойства векторного произведения:
Координатное представление:
|
||||||||||||
|
Смешанное произведение трех векторов – сочетание векторного и скалярного произведений (а х в)с. Свойства смешанного произведения:
Координатное представление:
Линейное пространство – множество L и его элементы вектора, если определены:
Свойства: для операций сложения, умножения векторов действуют все стандартные свойства.
Евклидово пространство – линейное пространство L, если в этом пространстве определена операция скалярного произведения двух векторов.
Основная идея аналитической геометрии: главный геометричес-кий объект описывается с помощью решения уравнений. Зная геометрические свойства линий можно найти ее уравнение. И обратно. Система координат на плоскости – способ, позволяющий численно описать положение точек на плоскости. |
Вывод уравнения окружности:
Способы построения прямой линии:
у – у0 = k(х – х0)
(х – х1)/(х2 – х1) = (у – у1)/(у2 – у1), х/а + у/в = 1
(х – х0)/а1 = (у – у0)/а2 – каноническое уравнение
Ах + Ву + С = 0, где С = -(Ах0 + Ву0)
у = kх + b, где k = tg = a2/a1
Расстояние от прямой Ах + Ву + С = 0 до начала координат: р = |С| / А2 + В2
Расстояние от произвольной точки М0 (х0, у0) до прямой Ах + Ву + С = 0: d = |Ах0 + Ву0 + С| / А2 + В2
|
Уравнение окружности. Вывод:
(х – а)2 + (у – в)2 = R, (х – а)2 + (у – в)2 = R2.
Эллипс – фигура, образованная точками плоскости, для каждой из которых сумма расстояний от двух данных точек постоянна и больше расстояния между этими точками. х2/а2 + у2/в2 = 1. Координата фокуса с = а2 – в2
Гипербола – фигура, образованная точками плоскости, для каждой из которых модуль разности расстояний до двух данных точек плоскости постоянен и меньше расстояния между этими точками. Данные точки – фокусы, а расстояния между ними – фокальное расстояние.
х2/а2 – у2/в2 = 1.
Парабола – фигура, образованная точками плоскости, для каждой из которой расстояние до данной точки равно расстоянию до данной прямой, не проходящей через данную точку. Данная точка – фокус, а прямая – директриса.
|
|
Преобразование координат на плоскости. Параллельный перенос системы координат. Имеем прямоуголь-ную систему координат ХУ с центром в точке О (0, 0). Через некоторую точку О* (а, в) проведем новые оси координат, параллельные Х и У, сохранив направление и масштаб. Координаты произвольной точки М (х, у) в новой системе координат Х*У* примут значения х* = х – а или х = х* + а у* = у – в у = у* + в т.е. параллельный перенос системы координат приводит к линейным преобразованиям координат.
Поворот системы координат. Систему координат ХУ с ортами i, j повернем на угол относительно начала координат и введем новые орты i*, j*. Выразим старые орты через новые i = cos i* - sin j* j = sin i* + cos j* Радиус-вектор произвольной точки М (х, у) разложим по ортам i, j и перейдем от них к ортам i*, j*. ОМ = {х, у} = хi + уj = x (cos i* - sin j*) + y (sin i* + cos j*) = (x cos + y sin a) i* + (-x sin + y cos ) j* = {x*, y*}
В результате получаем формулу преобразования координат при повороте осей на угол : х* = х cos + y sin y* = -x sin + y cos
|
Полярные координаты. Пусть на плоскости дана точка О – полюс и луч ОР – полярная ось. Тогда положение точки М на плоскости определяет полярный угол = МОР и радиус-вектор r = ОМ. Если полярная ось совпадает с осями координат ХУ, то х = r Cos , y = Sin и обратный переход r = x2 + y2, tg = y / x. Если полюс совпадает с фокусом эллипса, гиперболы, параболы и луч ОР направлен по оси симметрии в сторону более удаленной вершины, то уравнения всех трех кривых будут одинаковы r = p / (1 – Cos ), где - эксцентриситет, p – параметр. Для эллипса и гиперболы p = b2 / a.
Множество – совокупность некоторого числа однотипных элементов. Множество обозначают заглавной буквой (А, В, С), а его элементы строчными буквами (a, b, c). Например, множество натуральных чисел N = {1, 2, 3, 4, …}.
Функция у = f(х) на множестве Х – правило соответствия между этими множествами, при котором для каждого х Х существует единственный элемент у У.
|
Общие свойства функций Основные способы задания функций:
Функция имеет явную форму у = f(х), если зависимая переменная стоит слева в первой степени и неявную форму, если х и у связаны более сложным образом. Пример: у = х2, у2 + х2 = R2. Обратная функция х = f-1(у) получается из прямой функции у = f(х), если в качестве аргумента взять у. Пример: у = х2 – прямая, х = у – обратная. Функция четная, если смена знака аргумента не меняет значение функции f(-х) = f(х) и нечетная, если смена знака аргумента меняет общий знак функции f(-х) = -f(х). Функция периодическая, если при изменении аргумента на постоянную величину значение функции не меняется f(х + а) = f(х). Наименьшее значение а называется периодом. Пример: Sin(x + 2) = Sin(x).
Основные элементарные функции:
|
|
Числовая последовательность аn – последовательность значений функции, определенных для целочисленных аргументов, т.е. аn = f(n), где n = 1, 2, 3. Всякая функция f(x), определенная на интервале (1, ), порождает свою числовую последовательность. Предел числовой последовательности аn – число а, такое, что с ростом n разность между числом и членом последовательности становится меньше любого другого наперед заданного числа, тогда а = lim аn. Бесконечно малая последовательность – последовательность с нулевым пределом, а процесс прохождения по ее элементам называется предельным процессом. Бесконечно малая величина – величина х, если она стремиться к нулю, делается меньше любого наперед заданного числа, но 0 так и не достигает. Процесс изменения б.м.в. называется предельным процессом. Теорема: функция, обратная к бесконечно малой, является бесконечно большой и наоборот.
Леммы о бесконечно малых. Лемма 1: алгебраическая сумма конечного числа бесконечно малых при х а является бесконечно малой. Лемма 2: произведение ограниченной в окрестности точки а функции на бесконечно малую при х а является бесконечно малой.
Сравнение бесконечно малых. Пусть при х а а(х) и в(х) – бесконечно малые, тогда:
|
Теоремы о пределах:
Первый замечательный предел: lim Sinx / x = 1, при х 0 Имеем окружность R = 1 и касательные AD, BD. Из прямоугольных ОАС и ОАD следует: Sin x = AC/1, tg x = AD/1. Точки А и В соединяют три линии: прямая АВ = 2АС = 2 Sin x, дуга АВ = 2х и ломанная ФВИ = 2АD = 2tgx. Из соотношения длин этих линий следует: 2Sinx < 2x < 2tgx. Значит, 1 < x/Sinx < 1/Cosx, 1 > Sinx/x > Cosx. При переходе в неравенстве к пределу х0 имеем lim Cosx =1, 1 lim Sinx/x 1, следовательно, lim Sinx/x = 1.
Натуральное число – основание логарифма, приводящее к высшей степени симметрии графиков показательной и логарифмической функций. Обозначается е = 2,72… |
Средняя скорость – отношение пройденного телом пути к затраченному времени. Vср = [S(t) – S(t0)] / (t – t0) Мгновенная скорость – средняя скорость, взятая за бесконечно малый промежуток времени. Vмг = lim [S(t) – S(t0)] / (t – t0), при t t0 Производная функции f(x) - предел lim [f(x) – f(x0)] / (x – x0) = f(x0) Производная – предел отношения приращения функции к приращению аргумента. Алгебраический смысл: производная в точке х показывает, во сколько раз быстрее изменяется функция, чем аргумент в окрестностях этой точки, т.е. дает сравнение двух «точечных» параметров. Физический смысл: скорость. Продифференцировать уравнение движения S = S(t) – значит определить мгновенную скорость тела в каждый момент времени t. Геометрический смысл: тангенс угла наклона касательной. |
|
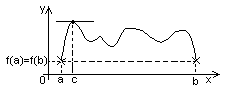
Теорема Роля: если функция f(x) непрерывна на заданном промежутке [a,b] деффер. на интервале (a,b) f(a)=f(b) то существует точка с из интервала (a,b), такая, что f’(c)=0.
Теорема Коши: если f(x), g(x) удовлетворяет трем условиям:
g(b) g(a) (неравны по теореме Ролля).
по теореме Ролля существует с (a,b); f’(с) = 0.
|
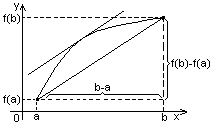
Теорема Лагранжа: если функция f(x) непрерывна на [a,b] и дифференцирована на (a,b), то существует точка с (a, b), такая, что: f(b) - f(a) = f’(c)(b - a).
Доказательство: применим теорему Коши, взяв только g(x)=x, тогда g’(x)=10.
Теорема Лопиталя: если функция f(x), g(x) дифференцирована в окрестности точки а, причем f(a) = g(a) = 0 и существует предел
Доказательство:
|
Достаточный признак экстремума функции: если f’(x)>0 на интервале (x0-б,х0) и f’(x)<0 на интервале (х0,x0+б) т.е. меняет знак с плюса на минус при переходе на точку х0, т.е. х0 – точка максимума f(x), а если же меняет знак с минуса на плюс, то х0 – точка минимума. Доказательство:
Непрерывность функции. Пусть задана функция z=f(x,y), р (х, у) - текущая точка, р0(х0,у0) - рассматриваемая точка. Функция z = f(x,y) называется непрерывной в точке р0, если выполняются 3 условия:
lim f(x,y) = f(x0,y0), p p0 Свойства:
|