

3. Описание экспериментальной установки.
Индукционный метод измерения характеристик магнитного поля основан на явлении электромагнитной индукции. Метод предназначен для измерения как переменных, так и постоянных магнитных полей. При измерении характеристик переменного магнитного поля в это поле помещают проводящий замкнутый контур, как правило, катушку, состоящую из N0 витков. Поскольку поле переменное, то магнитный поток, пронизывающий контур, будет меняться, и в контуре возникнет ЭДС электромагнитной индукции
![]() ,
(12.9)
,
(12.9)
где S0– площадь витка,Bn– проекция вектора магнитной индукции на нормаль к площадкеS0.
В случае, если магнитное поле создается токами, изменяющимися по закону синуса, легко доказать, что индукция магнитного поля, пропорциональная силе тока, также изменяется по закону синуса
B=Bmsin(t+). (12.10)
Если изначально известно направление магнитного поля, то контур с током можно сориентировать таким образом, чтобы вектор магнитной индукции был перпендикулярен площадке S0. Тогда при подстановке уравнения (12.10) в (12.9)
![]() (12.11)
(12.11)
Амплитудное значение ЭДС индукции
![]() (12.12)
(12.12)
Из выражения (12.12) видно, что, зная параметры контура, частоту колебаний тока, создающего магнитное поле и амплитуду ЭДС индукции, можно определить амплитудное значение индукции магнитного поля.
В случае измерения характеристик постоянного магнитного поля замкнутый проводящий контур вращают в магнитном поле с некоторой угловой скоростью . По закону электромагнитной индукции в контуре возникает ЭДС индукции, определяемая формулами (12.11-12.12).
В работе исследуется магнитное поле, создаваемое прямолинейным проводником с током I1 (кабель L1 из нескольких проводов) (рисунок 12.2). В качестве источника питания токовой системы используется генератор сигналов функциональный ГСФ-2. Основные технические характеристики генератора таковы:
Диапазон частот 0,1 Гц-100 кГц;
Выходные сигналы гармонический,
пилообразный,
прямоугольный;
Выходное напряжение 0-10 В;
Выходной ток 0-1 А.
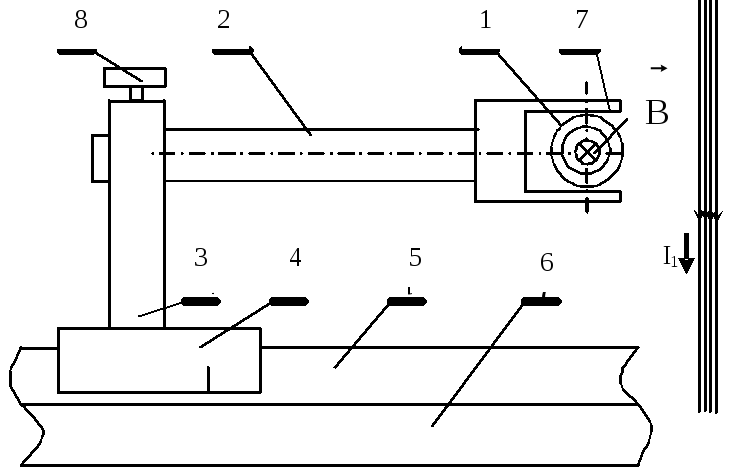
Рисунок 12.2 – Индукционный эталонный датчик
Для измерения магнитной индукции поля, создаваемого проводником с током, используется индукционный эталонный (с известными параметрами) датчик L2 магнитного поля (рисунок 12.2) – это катушка 1 из N0=2502 витков диаметром d=18,01,0 мм (площадь витка S0=2,50,3 см2), закрепленная на кронштейне 2, установленном в стойке 3 на рейтере 4, которая может перемещаться по рельсу 5. Под рельсом закреплена линейка 6, по которой отсчитывается координата метки, нанесенной на рейтере. Катушка может поворачиваться вокруг оси, перпендикулярной оси кронштейна. Угол поворота отсчитывается по шкале 7. При слегка ослабленном винте 8 кронштейн может также поворачиваться. Таким образом, катушка может принимать произвольную ориентацию.
Электрическая схема установки изображена на рисунке 12.3.
Кривые на экране осциллографа при пилообразном токе показаны на рисунке 12.4. Их форма соответствует закону электромагнитной индукции: ЭДС индукции пропорциональна скорости изменения магнитного потока с течением времени.
Перед выполнением измерений катушку L2 ориентируют в магнитном поле таким образом, чтобы плоскость ее витков была перпендикулярна направлению магнитного поля. В этом случае магнитный поток, пронизывающий катушку пропорционален индукции магнитного поля, создаваемого контуром L1,
Ф=N0S0B. (12.13)

Рисунок 12.3 – Индукционный метод регистрации магнитного поля
Ток I1 в контуре L1 изменяется пропорционально напряжению U1: I1=U1/R. Следовательно, индукция B магнитного поля в месте положения катушки изменяется с течением времени пропорционально напряжению U1 (рисунок 12.4). Магнитный поток, пронизывающий катушку, меняется с течением времени. По закону электромагнитной индукции в катушке возникает ЭДС индукции
![]() (12.14)
(12.14)

Рисунок 12.4 – Напряжение на датчике тока
и на индукционном датчике
За половину периода t=T/2 колебаний напряжение в контуре L1 изменяется от –U1max до +U1max, что соответствует размаху колебаний U1 (рисунок 12.4.). Так как BU1, то за это же время магнитное поле изменится на B=2Bm, где Bm – амплитуда колебаний магнитного поля. За такое же время ЭДС индукции U2 изменяется на U2. Используя соотношение (12.14), получим
![]() . (12.15)
. (12.15)
Тогда амплитуда Bm магнитной индукции поля, создаваемого контуром L1 в месте положения эталонного датчика L2, измеряемая экспериментально индукционным методом
Bэ=Bm=ΔU2T/(4N0S0), (12.16)
где Т – период колебаний. Если измерения проводятся на синусоидальном сигнале, то амплитуда магнитной индукции определяется формулой
Bэ=U2/(2![]() N0S0)
= ΔU2/(4
N0S0)
= ΔU2/(4![]() N0S0), (12.17)
N0S0), (12.17)
где – частота колебаний.