

10.3. Основные узлы иис
Как отмечалось выше (гл. 1, 10.1), после первичных измерительных преобразователей имеется измерительный сигнал, подлежащий унификации и масштабированию для ввода в ИИС. Поэтому непосредственно в датчике или в отдельном блоке после первичного измерительного преобразователя в системе используются унифицирующие преобразователи для создания унифицированного или стандартного измерительного сигнала ГСП с целью передачи его по линии связи. Для ввода унифицированных сигналов в линию связи или в измерительные и вычислительные блоки ИИС необходимо предусмотреть коммутирующие устройства. Наиболее общими устройствами измерительных блоков в ИИС являются устройства сравнения. Кроме того, в ИИС используются оригинальные запоминающие и представляющие устройства (включая устройства регистрации).
Каналы связи. Под каналом связи понимают совокупность технических средств, обеспечивающих независимую передачу сообщений. В эту совокупность входят: физическая среда, по которой передается сигнал, линия связи и устройства для передачи и приема сигнала.
В зависимости от характера передающей среды и физической природы сигналов линии связи (как и каналы), используемые в ИИС, можно разделить на гидравлические, пневматические, электрические, радио, акустические и оптические.
Для технологических измерений в основном используются пневматические и электрические линии связи, причем предпочтение отдается последним (см. 9.10).
Основными характеристиками канала связи являются: емкость, скорость передачи информации и пропускная способность канала-связи.
Емкость канала VK представляет собой произведение трех величин
VK — TKFKHKt
где Тк — время, в течение которого канал занят передаваемым сигналом; FK— полоса частот, пропускаемая каналом; Нк — характеристика, показывающая превышение мощности сигнала Рс» которую может пропустить канал, над мощностью помех Рп в канале.
Скорость передачи информации и определяет количество информации /, передающееся в единицу времени
и = ЦТ.
Максимально возможную скорость передачи информации по каналу называют пропускной способностью канала.
С = итах = - щах -у {Н (х) - Н (x/XN)}> (10-3)
где Н(х)—энтропия источника сигнала; H(x/XN)—условная энтропия, определяемая помехой и зависящая от ее уровня и характера.
Иначе говоря, пропускная способность определяет максимальное количество информации, которое можно передать в единицу времени. Размерность пропускной способности — ед. инф/с (см. 1.3).
Для того чтобы определить, насколько скорость передачи информации близка к пропускной способности канала, вводят характеристику называемую коэффициентом использования канала (г] = и/С).
Пропускная способность канала определяется только свойствами канала и не зависит от источников сигнала.
При передаче сигнала, представляющего собой непрерывную функцию x(t), и при условии, что: 1) ширина полосы частот ограничена частотой F\ 2) средняя мощность сигнала задана величиной Рс; 3) помеха в канале распределена по нормальному закону; 4) помеха в полосе F имеет равномерный спектр и мощность помехи задана как Рп; 5) сигнал и помеха статистически независимы, выражение (10-3) принимает вид
C-Flog(l + Pc/Pn).
Пропускная способность канала не обязательно растет пропорционально F, так как с увеличением полосы пропускания может возрасти и мощность помехи Рп.
При передаче сообщений с помощью двух символов — нуля и единицы — условная или остаточная энтропия
Н (xlXN) = ро log р0 + (1 — р0) log (1 — р0).
Поэтому выражение (10-3) принимает вид
С = и [log 2 + ро log Ро + (1 ~ Ро) log (1 — ро)],
где и — скорость передачи двоичных символов.
Пропускная способность достигает максимального значения в двух случаях: когда в канале отсутствует помеха, т. е. ро=0, и когда ро=1, т. е. заранее известно, что переданная единица превращается в нуль, и наоборот. В этих случаях C=aIog2.
При ро=0,5 равновероятен прием искаженного и неискаженного символов. Поэтому ничего достоверного о переданном сообщении сказать нельзя и C=Cmin=0.
Для того чтобы по каналу передавалась информация без искажений, необходимо, чтобы его емкость УИ была больше объема сигнала Vc, пропускная способность С была больше скорости выдачи информации источником сигнала ид. Таким образом, надо согласовать емкость канала с объемом сигнала, а пропускную способность канала — со скоростью поступления информации в канал.
1. Согласование величин VK и Vc. Под объемом сигнала понимают про- изведение трех величин Vc~TcFcHCt где Тс —длительность сигнала, пока- зывающая, на какое время занимается канал; Fc — ширина спектра сигнала; И с — превышение сигнала над помехой.
Однако выполнение условия VR^VC не всегда достаточно; кроме него, должны выполняться соотношения TK^TCt FK^FC, НК^НС.
Если какое-либо соотношение не выполняется, а условие VK^VC соблюдено, то необходимо предварительное преобразование сигнала. Обычно для этого изменяют величины Fc и Тс. Например, если Fe=3FKt а Гс^Гк, то для выполнения условия неискаженной передачи в 3 раза увеличивают длительность всех элементов сигнала. При этом ширина спектра Fc уменьшается в 3 раза.
2. Согласование величин С и ид. Условием неискаженной передачи ин- формации является выполнение соотношения ww<C=/7Klog(l+Pc/Pn), по- зволяющее определить требуемую полосу пропускания канала.
Значение ыд можно определить следующим образом. Если количество информации, поступающее от источника в какой-то момент времени, т. е. соответствующее одному отсчету, равно /(*). а число отсчетов в секунду я, то скорость выдачи информации, т. е. ее количество, поступающее от датчика в 1 с, равно
ыд = п/ (х).
В частности, при n=l/At=2Fu (где Fh — ширина спектра измеряемой величины) скорость
«д = 2^„/ (х),
тогда
2 FJ (х) < FK log (l +-jr") '
откуда
F т> *ЬШ
log(l + Pc/Pn) Для частного случая, при /=logm, можно записать
F > 2 F* log т
log(l + Pc/Pn) '
Приведенным соотношением можно лользоваться и тогда, когда на вход канала поступает информация от / источников, опрашиваемых последова-

Рис. 10-5
тельно. В этом случае в качестве Fc берется полоса частот сигнала, получающегося после коммутации. Кроме того, под /(*) понимается информация, даваемая всеми источниками, в частности, если измеряемые величины статистически независимы, то I(x) =I(Xi) +1(х2) +...+/(**).
Отношение скорости передачи информации и к скорости поступления информации от источника ид называют коэффициентом передачи информации.
Используемые линии связи для ИИС отличаются не только устройством, но и структурой и, главное, способом разделения каналов.
При выборе структуры линии связи надо учитывать стоимость аппаратуры, размещенной на приемной и передающей сторонах. Однако можно допустить, что стоимость оконечной аппаратуры много меньше стоимости линий связи и поэтому ее влиянием на структуру линий можно пренебречь. Тогда определяющим при выборе структуры линий является ее экономичность и надежность.
Наиболее распространенные структуры линий связи, используемые для обслуживания рассредоточенных объектов, приведены на рис. 10-5.
Схемы, показанные на рис. 10-5,а и 10-5,6, называемые цепочечными или последовательными, можно использовать, когда объекты рассредоточены как вдоль линии (рис. 10-5, с), так и по площади (рис. 10-5,6). Схему, приведенную на рис. 10-5,в, называют радиальной, что следует из ее внешнего вида, а схему рис. 10-5,г — кустовой, так как здесь часто источники информации И объединены в общие группы (кусты), каждая из которых соединена с приемным пунктом П отдельной линией. Разновидностью кустовой схемы является древовидная, отличающаяся тем, что в точке соединений линий устанавливаются коммутирующие устройства. Кроме перечисленных, могут использоваться и смешанные структуры линий связи.


|
Устройство |
|
Передающее устройство |
Линия |
Приемное |
|
Устройство 1 |
|
уплст-нения каналов |
Г** |
связи |
устройство |
|
разделения каналов |
Рис. 10-6
протяженности линии, т. е. ее длины. Таким образом, для удешевления линии необходимо найти способ кратчайшего соединения источников информации с приемным пунктом.
В большинстве случаев при построении ИИС требуется одновременно передавать информацию от множества объектов к одному получателю. Использовать для передачи сообщений от каждого объекта отдельную линию связи экономически невыгодно, а часто просто невозможно, поэтому возникает необходимость передавать всю информацию по одной и той же линии, но так, чтобы каждое сообщение передавалось по своему каналу связи. Для этого на передающем конце линии необходимо устройство уплотнения каналов (рис. 10-6).
На приемном конце линии соответствующие устройства разделяют сообщения, направляя каждое своему измерительному преобразователю ИП; информационных сигналов. Такая система связи, когда при одной линии создается множество каналов, называется многоканальной.
Для того чтобы сигналы, передающие сообщения по каналам, можно было разделить, их нужно различать по каким-то признакам. В зависимости от того, какие признаки сигналов используются для разделения каналов, различают и способы построения многоканальных систем. Наиболее распространены способы частотного и временного разделения каналов.
В некоторых системах используют комбинированное, т. е. совместно частотное и временное, разделение. Возможно также разделение по форме сигналов и фазе.
В системах с частотным разделением каналов чаще используются амплитудная, частотная и фазовая модуляции. В системах с временным разделением каналов может применяться любой ее вид.
В ИИС для технологических величин чаще всего используется временное разделение каналов. При этом информация по каждому каналу передается периодически в течение короткого промежутка времени, который намного меньше периода опроса всех каналов *. Для уменьшения влияния канала на канал между ними нужно оставлять защитные промежутки времени, значения которых определяются допустимыми погрешностями передачи информации по линии связи в системе.
Происхождение этой погрешности при временном разделении каналов связано с тем, что сигнал в канале передается прямоугольным импульсом,
т. е. импульс отличен от нуля только
U
К-1-й
КФШл
ли
ртах
 пределах определенного интервала
времени, а за его границами сигнал
отсутствует. Однако сигнал, ограниченный
во времени, имеет бесконечный спектр
и поэтому не может быть передан без
искажения. На практике любые каналы
имеют ограниченный спектр, а это искажает
импульс, т. е. удлиняет его передний и
задний фронты или, иначе говоря,
происходит расплывание импульса.
Подобное расплывание импульса во
времени приводит к тому, что часть
импульса попадает в соседние интервалы
времени, отведенные для соседних каналов.
Попадание импульса в соседний канал и
является причиной погрешности.
пределах определенного интервала
времени, а за его границами сигнал
отсутствует. Однако сигнал, ограниченный
во времени, имеет бесконечный спектр
и поэтому не может быть передан без
искажения. На практике любые каналы
имеют ограниченный спектр, а это искажает
импульс, т. е. удлиняет его передний и
задний фронты или, иначе говоря,
происходит расплывание импульса.
Подобное расплывание импульса во
времени приводит к тому, что часть
импульса попадает в соседние интервалы
времени, отведенные для соседних каналов.
Попадание импульса в соседний канал и
является причиной погрешности.
Рассмотрим влияние на 6-й канал только одного предыдущего k— 1-го канала. Импульсы, передаваемые по этим каналам, приведены на рис. 10-7. Вследствие фазовых или амплитудных искажений на верхнем конце полосы пропускания импульсы искажены, т. е. их передние и задние фронты удлинены. Если интервал между соседними импульсами мал, то в результате влияния А—1-го канала импульс в k-м канале изменяется, причем изменяется как его амплитуда (на &U), так и длительность (ширина). Изменение амплитуды вызывает погрешность при применении амплитудно-импульсной модуляции. Если же используется время — импульсная модуляция, то импульсы предварительно ограничиваются по максимуму и минимуму, в результате чего на демодулятор поступают импульсы с амплитудой Uo max—U0 mm. В этом случае погрешность обусловлена изменением ширины импульса, а изменение его амплитуды погрешности не вносит.
Унифицирующие преобразователи. Не все подключаемые к системе датчики имеют на выходе унифицированную форму измерительного сигнала. Поэтому между датчиком и системой включают специальный унифицирующий преобразователь (УП). Эти УП должны работать так, чтобы различным
1 Для большинства ИИС время опроса по одному каналу выбирается одинаковым для всех каналов системы.
358
диапазонам изменения или различной физической величине измерительных сигналов на входе соответствовал один и тот же диапазон изменения унифицированного выходного сигнала.
УП может быть как индивидуальным для каждого датчика, так и обслуживать определенную группу датчиков. При втором способе унификации датчики к УП подключаются поочередно. Так как унификация (преобразование сигналов) может проводиться в несколько этапов, то первый способ используется чаще для унификации сигналов с датчиков при передаче их по линиям связи, а второй —при обработке их в вычислительном блоке (кодирование).
а

Рис. 10-8
Если характеристика датчика линейна и меняется в пределах от до Х2, а шкала выходного сигнала УП должна лежать в пределах от Утт до Утах, то унифицирующий преобразователь должен выполнять линейную операцию вида
У = Уо + toy
преобразующую входную величину при x=Xi в y-=Ymin (в частном случае 0), а при х=х2 в y=Ymax. Таким образом, при этой операции смещается начало шкалы и вводится масштабный коэффициент (дробное или целое число). Так построены основные стандартные УП ГСП (см. 9.1).
Чаще характеристики датчиков нелинейны. Например у термоэлектрического термометра стандартных градуировок нелинейность характеристик, связывающих ТЭДС с температурой, достигает 5—6%. Некоторые датчики имеют еще большую нелинейность. Унифицирующие преобразователи, работающие с такими датчиками, кроме рассмотренных выше операций, должны еще и линеаризовать характеристику. При работе ИИС совместно с ЦВМ операции по линеаризации характеристик могут выполняться вычислительными машинами (гл. 1).
В качестве примера УП, выполняющего линейную операцию, рассмотрим преобразователь, работающий с термоэлектрическим термометром ТТ
359
(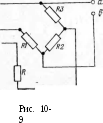 рис.
10-8). Преобразование в этом случае
выполняется в два этапа. На первом
этапе устанавливается нуль шкалы
вычитанием начального напряженияUot
часть
которого составляет ЭДС термопары из-за
температуры свободных концов, отличной
от градуировочной tG=Q
СС
(см. 3.5). Напряжение U0
получают
от моста с помощью делителя напряжения,
позволяющего использовать термопары
хромель-копель ХК,
хромель-алюмель
ХА
и
платинородий-платина ПП.
Медный
Ям,
и манганиновые R3
и
R4
резисторы
подгоняют так, чтобы выходное напряжение
моста менялось при изменении температуры
по тому же закону, что и ТЭДС при изменении
температуры свободных концов.
Масштабирование сигнала, т. е. его
изменение в k
раз,
удобнее всего выполнить с помощью
измерительного усилителя, имеющего
стабильный коэффициент усиления.
Для этого усилитель охватывают
отрицательной обратной связью ОЦ.
рис.
10-8). Преобразование в этом случае
выполняется в два этапа. На первом
этапе устанавливается нуль шкалы
вычитанием начального напряженияUot
часть
которого составляет ЭДС термопары из-за
температуры свободных концов, отличной
от градуировочной tG=Q
СС
(см. 3.5). Напряжение U0
получают
от моста с помощью делителя напряжения,
позволяющего использовать термопары
хромель-копель ХК,
хромель-алюмель
ХА
и
платинородий-платина ПП.
Медный
Ям,
и манганиновые R3
и
R4
резисторы
подгоняют так, чтобы выходное напряжение
моста менялось при изменении температуры
по тому же закону, что и ТЭДС при изменении
температуры свободных концов.
Масштабирование сигнала, т. е. его
изменение в k
раз,
удобнее всего выполнить с помощью
измерительного усилителя, имеющего
стабильный коэффициент усиления.
Для этого усилитель охватывают
отрицательной обратной связью ОЦ.
U~const
Возможны и другие способы смещения нуля и масштабирования. В приведенном примере унифицирующее преобразование выполнялось в аналоговой форме. Значительно выгоднее преобразовывать аналоговый сигнал в код, а затем выполнять масштабирование и линеаризацию [28, 42].
Коммутирующие устройства или коммутаторы наиболее часто используются для поочередного подключения датчиков ко входу системы или, иначе говоря, для временного разделения каналов.
Если коммутаторы предназначены для переключения аналоговых сигналов, например напряжений, то его основной характеристикой является погрешность коэффициента передачи:
V вых — Ubx
вх
6-
U
где с/вх —сигнал на входе коммутатора; иВЫх — сигнал на выходе коммутатора.
При передаче кодовых сигналов или при частотной модуляции носителей эта характеристика практически не имеет значения. К другим характеристикам относятся: быстродействие или число переключений в секунду; число датчиков, которое может обслужить коммутатор; максимальная частота коммутации каждого канала.
По принципу действия коммутаторы делятся на контактные и бесконтактные. В контактных коммутаторах датчик подключается замыканием механических контактов, т. е. контактными ключами. Контактные ключи, к которым относятся электромагнитные реле всевозможных типов, обладают малым сопротивлением в проводящем состоянии Rnp (сотые доли ома) и практически бесконечно большим в разомкнутом /?обР. Быстродействие контактных ключей предельная рабочая частота не превышает нескольких сотен герц. К контактным коммутаторам относятся и силовые искатели, частота переключений которых не превышает нескольких десятков герц.
Бесконтактные ключи представляют собой элементы с управляемой проводимостью, например диоды, транзисторы, фоторезисторы и др. Они позволяют производить переключения с частотой в десятки мегагерц, но у них сопротивление #Пр значительно больше, чем у бесконтактных, a Roop отлично от бесконечности.
По конструкции коммутаторы можно разделить на аппаратные и схемные.
К аппаратным, представляющим собой конструктивно целое устройство, относятся, например, шаговые искатели, ртутно-струйные коммутаторы, электронно-лучевые распределители и др. Среди них наиболее распространенным типом является шаговый искатель, представляющий собой ряд неподвижных пластин, расположенных по окружности, на которых имеются изолированные ламели — контактное поле. Вдоль этого контактного поля перемещается подвижная щетка. Число неподвижных контактов в одном ряду у шаговых искателей— 11, 17, 25 или 50, а число рядов, по которым одновременно перемещаются жестко связанные между собой, но электрически изолированные щетки, равно 4—8. Коммутация шаговыми искателями происходит со скоростью, не превышающей нескольких десятков шагов в секунду.
Схемные коммутаторы собираются по какой-либо схеме из контактных или бесконтактных ключей.
Коммутаторы могут работать в режиме обегающего и выборочного контроля. В первом режиме к системе периодически поочередно подключаются все датчики. В режиме выборочного контроля подключение датчиков происходит по некоторой программе.
Запоминающие устройства. В ИИС измерительную информацию приходится не только использовать в процессе измерения и контроля, но и хранить в течение определенного времени. Кроме того, в ряде случаев информация вообще не может быть использована непосредственно после ее получения и должна быть сохранена в запоминающем устройстве (ЗУ).
Основными характеристиками любого ЗУ служат его емкость и скорость записи и получения необходимой информации.
ЗУ часто делят на оперативные — более быстродействующие, но обладающие сравнительно малой емкостью, и внешние — с низким быстродействием, но с большей емкостью. Кроме того, их можно подразделить на периодические и непериодические. В периодических записанная информация находится в периодическом движении по отношению к записывающим и считывающим устройствам. Поэтому информация может быть выбрана только в определенные моменты времени. В непериодических движение информации отсутствует и ее выборка осуществляется специальными переключающими цепями в любой произвольный момент времени. Скорость получения данных в этом случае больше.
Информация из ЗУ может выбираться как с ее разрушением, так и без разрушения. В некоторых устройствах с разрушением вместо разрушенной информации вводится новая.
ЗУ могут быть выполнены: на магнитных сердечниках; на перфораторных картах и лентах; на магнитных носителях и др.
Перфокартные ЗУ представляют собой стандартные ленты (перфоленты) или карты (перфокарты), информация на которые записывается в виде кодовых комбинаций круглых или прямоугольных отверстий, причем коду «1» соответствует отверстие, а коду «О» — его отсутствие. Коды чисел записываются на ленту в виде параллельных дорожек, каждая из которых соответствует определенному разряду.
При выборке информации с ленты все разряды считываются параллельно. Осуществляется считывание, например, с помощью контактных щеток, скользящих по поверхности ленты. При попадании щетки в отверстие в ее цепи возникает импульс тока, фиксируемый специальным устройством. Существуют и другие методы считывания, например с помощью фотоэлементов. С перфоленты информация считывается со скоростью 150—300 знаков в секунду.
Емкость перфокарт может достигать 960 двоичных разрядов, или 24 чисел. Практически число разрядов, записанное на перфокарте, оказывается меньшим «з-за необходимости иметь служебную информацию, например номер перфокарты и т. д. Информация с перфокарт может выводиться теми же методами, что и с перфолент.
Перфораторные ЗУ имеют то преимущество, что могут неограниченно долго храниться и многократно использоваться. Широкое распространение перфораторных ЗУ объясняется тем, что большинство вычислительных машин имеет устройства для ввода информации с перфораторных ЗУ и вывода информации на них.
Среди ЗУ с магнитными носителями широко распространены магнитографы (магнитофоны), устройства с магнитными дисками и магнитными барабанами. Емкость подобных ЗУ достигает нескольких сот миллионов- единиц информации.
Устройства представления информации. В связи с резким возрастанием потоков информации, получаемых с помощью ИИС, чрезвычайно важным становится согласование этого потока с пропускной способностью человека-оператора.
Эффективная деятельность оператора, т. е. скорость, с которой он воспринимает информацию, точность восприятия и т. д. определяются в первую очередь психофизиологическими факторами, характеризующими человека. Кроме того, важен характер информации и особенности технических средств. Поэтому при проектировании устройств отображения приходится решать самые разнообразные задачи. К ним относится и компоновка щитов, на которых располагаются приборы, и определение типов знаков (символов), их форм, размеров, цвета и многое другое.
Информацию, представляемую оператору, можно подразделить на три группы: оперативную, или экспресс-информацию, используемую оператором непосредственно в процессе контроля или управления технологическим процессом; статистическую, необходимую для последующей статистической обработки и обобщений результатов контроля и измерения; отчетную, предназначенную для документирования результатов контроля и измерения.
Оперативная информация, как правило, представляется оператору с помощью показывающих устройств или средств сигнализации, а статистическая \м отчетная — с помощью регистрирующих устройств. Выбор того или иного показывающего устройства осуществляют, исходя из требований, предъявляемых к устройствам отображения: точности, наглядности и т. д.
Показывающие устройства определяют количественную информацию о каждом измеряемом параметре. Однако при большом числе измеряемых ^параметров необходимо большое число показывающих устройств, с просмотром которых оператор может не справиться. Работа оператора облегчается, 'если информация ему выдается в комплексном виде. Можно, например, заменить отдельные приборы одним экраном, на котором несколько значений параметров изображено разным цветом в виде графиков или таблиц.
В ряде случаев оператору целесообразно получать обобщенную информацию, характеризующую поведение объекта (или процесса) в целом. Такие формы предусмотрены в специальных устройствах — дисплеях.
Широкое применение для характеристики качественной информации нашли в системах устройства сигнализации, показывающих, протекает ли контролируемый процесс нормально или его параметры вышли за допустимые пределы.
В последнее время все чаще используются устройства отображения с иерархическим (многоступенчатым) способом определения информации. Информация в этом случае предъявляется оператору в несколько этапов. На первом этапе оператору показывается мнемосхема, изображающая исследуемый объект и он получает качественную информацию о поведении объекта в целом. На следующем этапе оператору по его вызову сообщается качественная информация о поведении отдельных блоков и устройств объекта. В дальнейшем происходит все большая детализация участков объекта. На последнем этапе оператору, по его требованию, представляется количественная информация от отдельных датчиков.
Регистрирующие устройства (РУ), наиболее часто используемые в системах, можно подразделить на механические и немеханические.
Механические цифропечатающие машины (ЦПМ), несмотря на сравнительно малое быстродействие (от 5—7 знаков в секунду до 25—30 строк в секунду, причем число знаков в строке может достигать нескольких сотен), .все шире используются для регистрации выходной информации в ИИС. Это объясняется тем, что они обеспечивают хорошее качество регистрации, а по Простоте и стоимости намного лучше немеханических РУ [1].
Немеханические РУ, к которым относятся светографические электроискровые; электрохимические; феррографические (магнитографические), обладают ■ значительно большим быстродействием, порядка 50—200 строк в секунду при числе знаков в строке 120—160, но все они значительно сложнее, дороже и требуют, как правило, специальных сортов бумаги [28].