

§6. Рабочие характеристики ад.
Для исследования АД и выявления его свойств служат рабочие характеристики:
скоростная характеристика:
 ,
,
 ;
;моментная характеристика:
 ;
; ;
; ;
; ;
; .
.
Характеристики
снимаются при условии:
![]() ,
,![]() .
.
Скоростная характеристика:
 ,
,

При увеличении полезной мощности растёт электромагнитный момент:
![]() .
.
Из характеристики
![]() видно, что увеличение момента сопровождается
увеличением скольжения, а следовательно
уменьшением скорости вращения вала
ротора
видно, что увеличение момента сопровождается
увеличением скольжения, а следовательно
уменьшением скорости вращения вала
ротора![]() .
При номинальной нагрузке скольжение
.
При номинальной нагрузке скольжение![]() не велико – 2%, а значит и
не велико – 2%, а значит и![]() изменяется незначительно. Поэтому
скоростная характеристика представляет
собой кривую, слабо наклонённую к оси
абсцисс.
изменяется незначительно. Поэтому
скоростная характеристика представляет
собой кривую, слабо наклонённую к оси
абсцисс.

Моментная характеристика:

Так как частота
вращения
![]() изменяется незначительно, то моментная
характеристика оказывается близкой к
линейной и определяется по формуле:
изменяется незначительно, то моментная
характеристика оказывается близкой к
линейной и определяется по формуле:
![]() .
.
Так как при
увеличении
![]()
![]() несколько снижается, то
несколько снижается, то![]() возрастает быстрее чем
возрастает быстрее чем![]() .
Всвязи с этим моментная характеристика
имеет выпуклость вниз.
.
Всвязи с этим моментная характеристика
имеет выпуклость вниз.

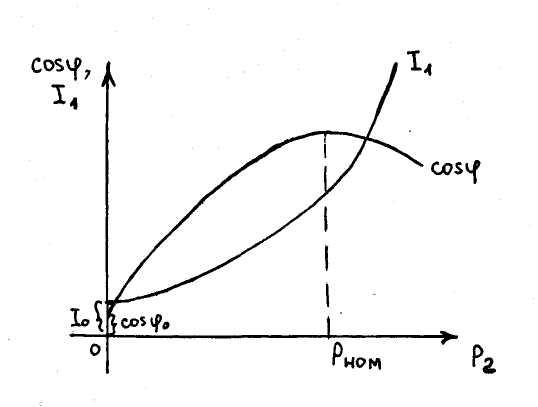
Зависимость коэффициента мощности и тока статора от выходной мощности:
 и
и
При холостом ходе,
когда
![]() =
0,S
тоже ≈ 0, а ток ротора
=
0,S
тоже ≈ 0, а ток ротора
![]() также ≈ 0
также ≈ 0
![]() .
.
![]() =
0, S
≈ 0,
=
0, S
≈ 0,
![]() ≈
0.
≈
0.

Ток
![]() является практически активным, так как
угол сдвига:
является практически активным, так как
угол сдвига:
![]() ;
;
![]() ;
;
![]() .
.
![]() ;
;
![]() .
.
Ток статора наоборот
будет практически реактивным. Поэтому
коэффициент мощности при холостом ходе
мал и составляет:
![]() .
.
При увеличении
![]() растёт ток ротора, т.е. растёт его
размагничивающее действие на магнитный
поток, что в свою очередь вызывает
увеличение тока статора. При этом ток
статора будет определяться в большей
степени активной составляющей тока
ротора. Поэтому угол
растёт ток ротора, т.е. растёт его
размагничивающее действие на магнитный
поток, что в свою очередь вызывает
увеличение тока статора. При этом ток
статора будет определяться в большей
степени активной составляющей тока
ротора. Поэтому угол![]() будет уменьшаться по сравнению с
будет уменьшаться по сравнению с![]() (х.х.):
(х.х.):![]() .
А
.
А![]() будет увеличиваться:
будет увеличиваться:![]() .
.
У современных
двигателей максимальный коэффициент
мощности
![]() .
Своего максимального значения
.
Своего максимального значения![]() достигает при нагрузке близкой к
номинальной. Дальнейшее увеличение
достигает при нагрузке близкой к
номинальной. Дальнейшее увеличение![]() приводит к уменьшению
приводит к уменьшению![]() .
Это объясняется сильным увеличением
реактивного сопротивления обмотки
ротора, т.е. за счёт увеличения скольжения.
А во-вторых, из-за увеличения реактивной
составляющей тока ротора:
.
Это объясняется сильным увеличением
реактивного сопротивления обмотки
ротора, т.е. за счёт увеличения скольжения.
А во-вторых, из-за увеличения реактивной
составляющей тока ротора:
![]() ;
;
![]() .
.
И теперь ток статора
будет определяться реактивной составляющей
тока ротора, которая по своему значению
превышает активную составляющую:
![]() .
И поэтому следующее значение
.
И поэтому следующее значение![]() (после Рном)
будет меньше:
(после Рном)
будет меньше:
![]() .
.
 Зависимость
потребляемой мощности от полезной:
Зависимость
потребляемой мощности от полезной:

При холостом ходе
двигатель потребляет из сети активную
мощность
![]() ,
которая полностью идет на покрытие
потерь мощности в двигателе.
,
которая полностью идет на покрытие
потерь мощности в двигателе.
![]() ;
;
![]() .
.
Поэтому при
возрастании нагрузки, т.е. при увеличении
![]() ,
потребляемая активная мощность растёт
несколько быстрее, чем
,
потребляемая активная мощность растёт
несколько быстрее, чем![]() за счёт увеличения потерь.
за счёт увеличения потерь.
Зависимость КПД от выходной мощности:


Исходя из энергетической диаграммы суммарные потери мощности определяются:
![]() .
.
Потери называются переменными, т.к. они изменяются с изменением тока ротора, а значит, зависят от нагрузки:
![]()
![]()
![]() .
.
Постоянные потери не зависят от нагрузки:
![]()
![]() .
.
Зная, что коэффициент
загрузки
![]()
![]()
![]() ,
ток ротора:
,
ток ротора:
 ,
,
так как
![]() ,
то
,
то![]() можно пренебречь. Находим, что ток ротора
прямопропорционален коэффициенту
загрузки.Следовательно, переменные
потери:
можно пренебречь. Находим, что ток ротора
прямопропорционален коэффициенту
загрузки.Следовательно, переменные
потери:
![]()
![]() .
.
![]() это
переменные потери при номинальной
нагрузке, когда
это
переменные потери при номинальной
нагрузке, когда
![]() и по аналогии с трансформатором можно
записать выражение для определения
КПД:
и по аналогии с трансформатором можно
записать выражение для определения
КПД:
 .
.
КПД максимален
при равенстве постоянных и переменных
потерь:
![]()
![]() .
.