

Описание установки и метода измерений
В настоящей работе
для определения момента инерции тела,
масса и размеры которого неизвестны
(круглого стержня А), используют тело с
известным моментом инерции (сплошной
цилиндр В). Цилиндр, жёстко связанный с
проволочным подвесом С, закреплен на
штативе К(рис. 3.1). Если цилиндр
вывести из положения равновесия, повернув
его на небольшой угол![]() ,
и предоставить самому себе, он будет
совершать крутильные колебания. При
деформации кручения в проволоке возникает
возвращающий момент сил
,
и предоставить самому себе, он будет
совершать крутильные колебания. При
деформации кручения в проволоке возникает
возвращающий момент сил![]() ,
пропорциональный углу поворота
,
пропорциональный углу поворота
![]() ,
(3.1)
,
(3.1)
где D – модуль кручения проволоки. Знак – говорит о том, что момент сил возвращает систему в положение равновесия.
Основной закон динамики
вращательного движения
![]() для данного случая, с учетом (3.1), имеет
вид
для данного случая, с учетом (3.1), имеет
вид
Рис. 3.1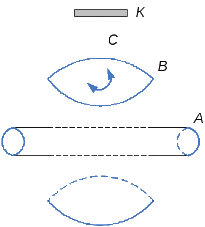
![]() ,
(3.2)
,
(3.2)
где
![]() – угловое ускорение тела.
– угловое ускорение тела.
Далее,
введя обозначение
![]() ,
уравнению (3.2) можно придать вид
,
уравнению (3.2) можно придать вид
![]() ,
или
,
или![]() .
(3.3)
.
(3.3)
Уравнение (3.3) является однородным дифференциальным уравнением второго порядка. Из него следует, что угол поворота тела представляет собой следующую функцию времени:
![]() ,
(3.4)
,
(3.4)
т. е. под действием момента силы, пропорционального углу поворота, тело совершает гармоническое колебательное движение.
Анализ уравнения (3.4)
позволяет установить, что постоянные
интегрирования
![]() и
и![]() представляют собой амплитуду и начальную
фазу колебаний соответственно, а
представляют собой амплитуду и начальную
фазу колебаний соответственно, а![]() – циклическую частоту, которая связана
с периодом колебаний соотношением
– циклическую частоту, которая связана
с периодом колебаний соотношением![]() .
.
Из последней
формулы находим период крутильных
колебаний
![]()
![]() .
(3.5)
.
(3.5)
Если
известен модуль кручения, то, используя
формулу (3.5), можно найти момент инерции
тела или системы тел, так как период
колебаний легко определяется на опыте
путем измерения времени
![]() ,
за которое тело совершает
,
за которое тело совершает![]() колебаний
колебаний
![]() .
.
В настоящей
работе модуль кручения проволоки
неизвестен, поэтому находят
период колебаний цилиндра
![]() и период колебаний системыцилиндр– стержень
и период колебаний системыцилиндр– стержень![]() по формулам:
по формулам:
![]() ,
(3.6)
,
(3.6)
![]() ,
(3.7)
,
(3.7)
где
![]() – момент инерции цилиндра,
– момент инерции цилиндра,![]() – момент инерции системы
цилиндр– стержень, равный
сумме их моментов инерции
– момент инерции системы
цилиндр– стержень, равный
сумме их моментов инерции![]() .
.
Из совместного решения уравнений (3.6) и (3.7) следует, что
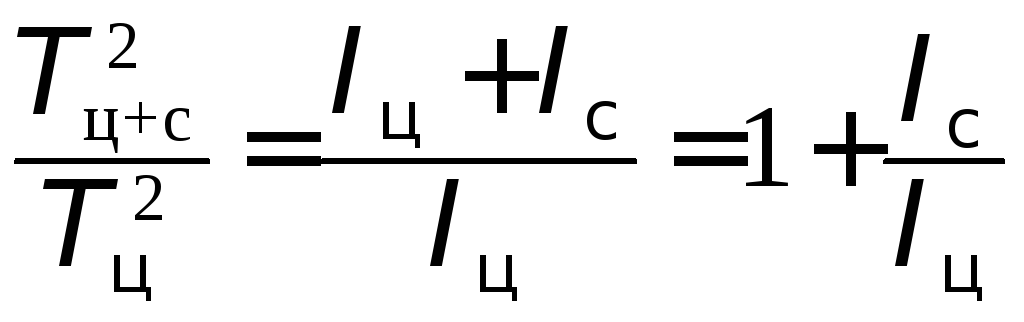 ,
,
откуда
момент инерции стержня ![]() равен
равен
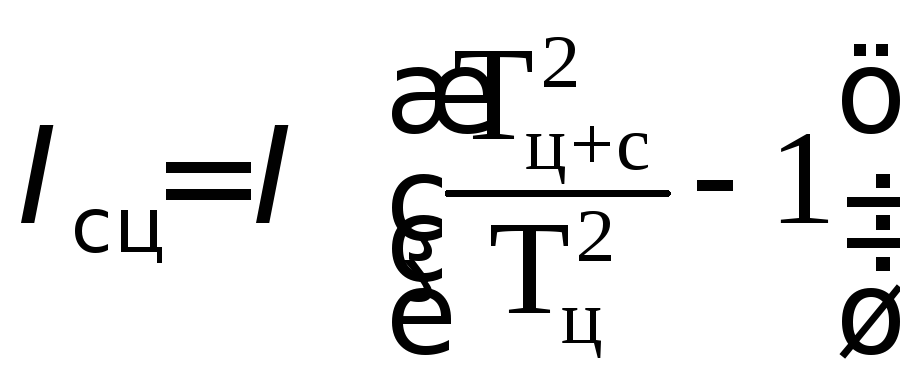 .
(3.8)
.
(3.8)
Момент инерции цилиндра относительно оси вращения, совпадающей с его осью симметрии, известен
![]() .
(3.9)
.
(3.9)
Подставив (3.9) в (3.8), получим окончательную формулу для расчёта экспериментального значения момента инерции стержня:
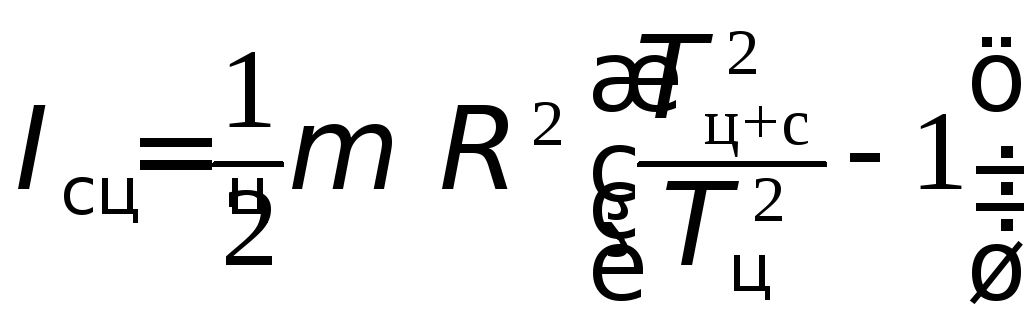 .
(3.10)
.
(3.10)
Теоретически момент инерции сплошного круглого стержня радиусом Rсотносительно оси симметрии, перпендикулярной его длине,lс, рассчитывается по формуле
![]() .
(3.11)
.
(3.11)