

Лекция по теории систем 3
.docЛекция № 3 Понятие системы с точки зрения макроподхода. Операторы. Принцип суперпозиции
Микроподход предполагает рассмотрение объекта «изнутри» на основе изучения протекающих в нем процессов.
Динамической системой å называется сложный математический объект, определяемый следующими аксиомами:
аксиома а: заданы множества:
моментов времени Т; состояний Х; входных воздействий U; допустимых входных воздействий W; выходных значений Y; выходных функций Г.
аксиома б: задано направление времени, т.е. Т - упорядоченное подмножество множества действительных чисел.
аксиома в: множество допустимых входных воздействий W удовлетворяет следующим условиям:
1. W - непустое;
2. Для воздействий
![]() ÎW,
в моменты времени
ÎW,
в моменты времени
![]() ,
существует такое
,
существует такое
![]() на
на![]() ,
что
,
что
![]() ,
при
,
при
![]() и
и
![]() при
при
![]()
аксиома г:
Задана
переходная функция состо-яния j,
которая определяет состояние
![]() ,
достигнутое
в момент времени
,
достигнутое
в момент времени
![]() ,
при
,
при
![]() ,
если в момент вре-мени
,
если в момент вре-мени
![]() имелось состояние:
имелось состояние:
![]() .
.
Свойства функции j :
Направление
времени: j
определена при
![]() ,
и необязательно определена при
,
и необязательно определена при
![]() .
.
Согласованность:
![]() ,
,![]()
Свойство композиции:
Для
![]() ,
,
![]() :
:
![]()
Свойство
причинности: Если
есть
![]() такие, что
такие, что
![]() при
при
![]() ,
то
,
то
![]() .
.
аксиома д:
Существует
отображение выхода
h,
которое таково:
![]() .
.
Тогда система может быть формально задана следующим образом:
![]()
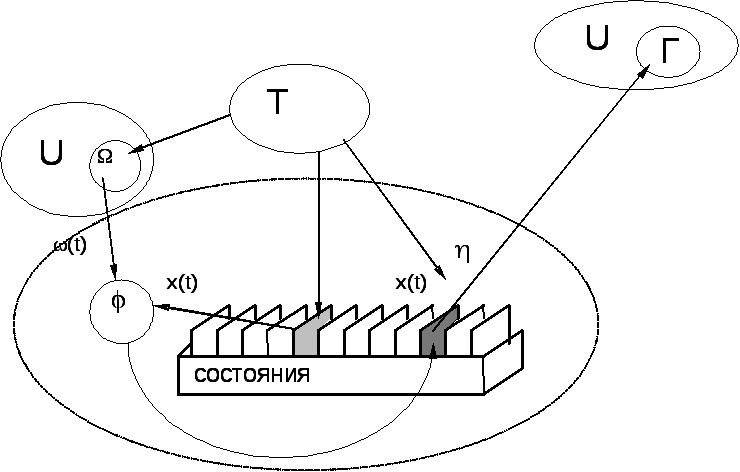
Говорят, что пара
![]() задает оператор
функционирования системы. На рисунке
показано формирование реакции системы
с помощью переменных состояния в
соответствии с микроподходом.
задает оператор
функционирования системы. На рисунке
показано формирование реакции системы
с помощью переменных состояния в
соответствии с микроподходом.
Оператор А задан, если установлено прави-ло по которому любому элементу из множества U ставится в соответствие элемент из множества Y и при этом Y не является множеством чисел.
Способы записи оператора:
1.
![]() ;
;
2. К
![]() применен оператор А;
реакция -
применен оператор А;
реакция -
![]() ;
;
3.
![]() ;
;
4.
![]() .
.
Примеры операторов
1. Оператор
дифференцирования:
![]() .
.
2. Оператор
интегрирования:
![]() .
.
Любой динамической системе может быть поставлен в соответствие оператор.
Операторы разделяются на два класса: нелинейные операторы и линейные операторы.
Оператор называется линейным если для не-го выполнен принцип суперпозиции, и – нели-нейным, если принцип суперпозиции для него не выполнен. Мы рассмотрим 2 формы записи этого принципа – дискретную и непрерывную.
Дискретная форма.
![]()
Непрерывная форма.
![]() .
.
Запись
![]() означает, что оператор А
действует в момент времени t.
означает, что оператор А
действует в момент времени t.
Если системе соответствует линейный опе-ратор, то система называется линейной. Иначе система называется нелинейной.
Физический смысл принципа заключается в следующем: реакция линейной системы на линейную комбинацию воздействий может быть определена, как линейная комбинация реакций системы на каждое из воздействий в отдельности.
Операторы
интегрирования и дифференци-рования -
линейные операторы. Оператор возве-дения
в квадрат:
![]() является нели-нейным оператором.
является нели-нейным оператором.
Обобщенная
![]() -функция
Дирака
-функция
Дирака
Для конструирования
моделей ДС рассмотрим обобщенную
![]() -функцию
Дирака и ее
свойства. Определим ее так:
-функцию
Дирака и ее
свойства. Определим ее так:
![]() ,
причем
,
причем
![]() .
.
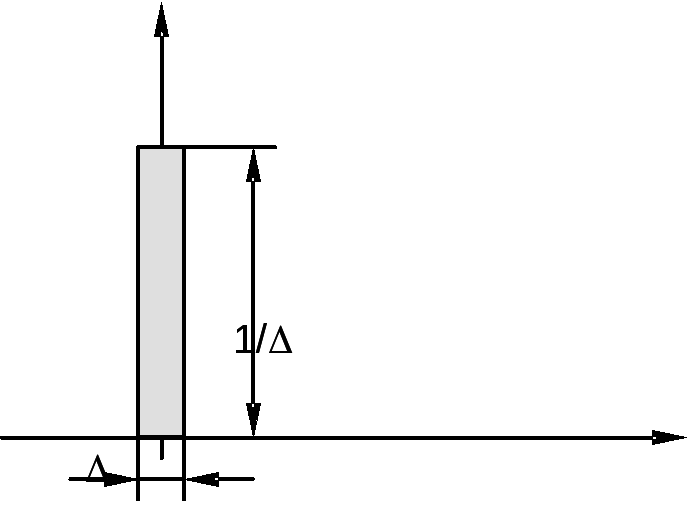
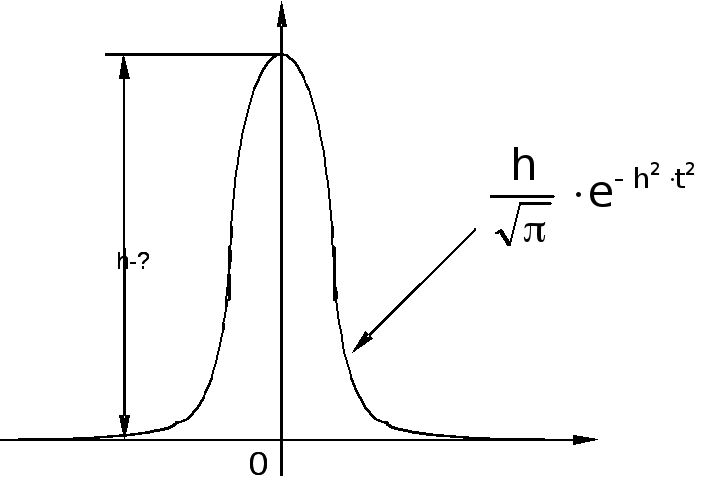
Возможные модели
![]() -функции:
-функции:
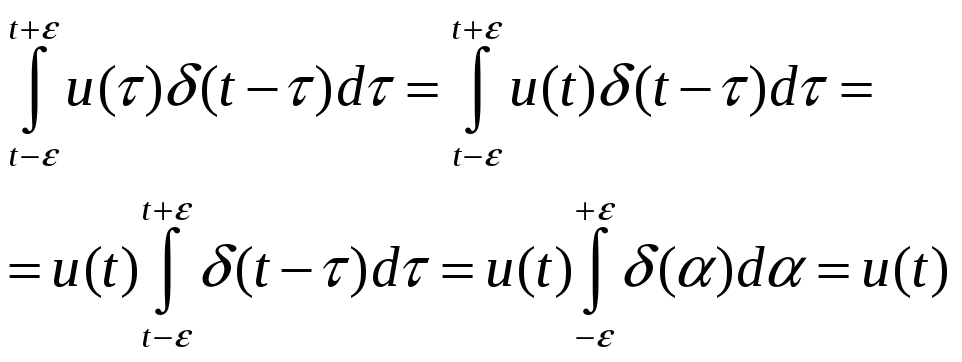
Мы будем использовать
т.н. фильтрующее свойство
![]() -функции:
-функции:
![]()
Приведем доказательство этого свойства:
![]() -функция
связана с единичной функцией
-функция
связана с единичной функцией
![]() ,
которая задается так:
,
которая задается так:
![]() .
В частности
.
В частности
![]() и
и
![]() .
.
Применим теперь
фильтрующее свойство
![]() -функции
для входного процесса
-функции
для входного процесса
![]() :
:
![]() .
.
Этот результат
можно интерпретировать как разложение
процесса
![]() по бесконечному числу импульсов
по бесконечному числу импульсов
![]() .
Считая
.
Считая
![]() -функцию
одним из возможных элементарных
воздейст-вий, запишем реакцию системы
с оператором
-функцию
одним из возможных элементарных
воздейст-вий, запишем реакцию системы
с оператором
![]() ,
используя полученное разложение:
,
используя полученное разложение:
![]() .
.
Если
![]() ,
то
,
то
![]()
Основной результат
этого в следующем: введена функция
![]() ,
которая определя-ется как реакция
системы на импульсное воздействие (т.н.
импульсная
переходная (весовая) функция).
С ее помощью получе-на общая форма модели
линейной непреры-вной системы,
представляющая собой интеграл свертки
весовой функции с вход-ным воздействием
,
которая определя-ется как реакция
системы на импульсное воздействие (т.н.
импульсная
переходная (весовая) функция).
С ее помощью получе-на общая форма модели
линейной непреры-вной системы,
представляющая собой интеграл свертки
весовой функции с вход-ным воздействием
Весовая функция
![]() показывает удельный вес возмущения,
которое дейст-вовало на систему в момент
времени
показывает удельный вес возмущения,
которое дейст-вовало на систему в момент
времени
![]() на формирование реакции системы в момент
времени t.
на формирование реакции системы в момент
времени t.