

Л а б о р а т о р н а я р а б о т а № 7
Определение оптимальных параметров
Динамической настройки пи-регулятора
По экспериментальным характеристикам
Цель работы:
на специализированной лабораторной установке экспериментально получить статические и динамические характеристики объекта управления, построить АФЧХ объекта;
рассчитать динамические параметры настройки субоптимального регулятора для инерционного объекта первого порядка с запаздыванием;
определить параметры настройки регулятора по АФЧХ регулируемого объекта;
рассчитать уставки импульсного регулятора Р25.1 лабораторной установки, реализовать рассчитанные параметры настройки и оценить качество полученных переходных процессов в АСР объекта.
1. Основные теоретические сведения
Типовые модели динамики инерционных статических
объектов управления
Если переходная характеристика объекта имеет s-образную форму, то наклон, кривизна характеристики и её расстояние от оси ординат зависят от динамических свойств конкретного объекта (кривая 1 на рис.1).
Для практических расчетов системы управления таким объектом s-образную кривую переходного процесса, снятую при единичном ступенчатом воздействии, достаточно охарактеризовать следующими параметрами, определяемыми непосредственно по графику:
передаточным коэффициентом объекта kо;
постоянной времени объекта Tо;
полным запаздыванием о, которое складывается из чистого запаздываниячи переходного запаздыванияп, т.е.
о=ч+п .
Параметры Tоиоопределяются достаточно легко – проведением касательнойAB к наиболее крутому участку переходной характеристики. Выделение длины горизонтального участка 0D, соответствующего запаздыванию ч, обычно затруднено, поэтому чможно определить только с погрешностью.
П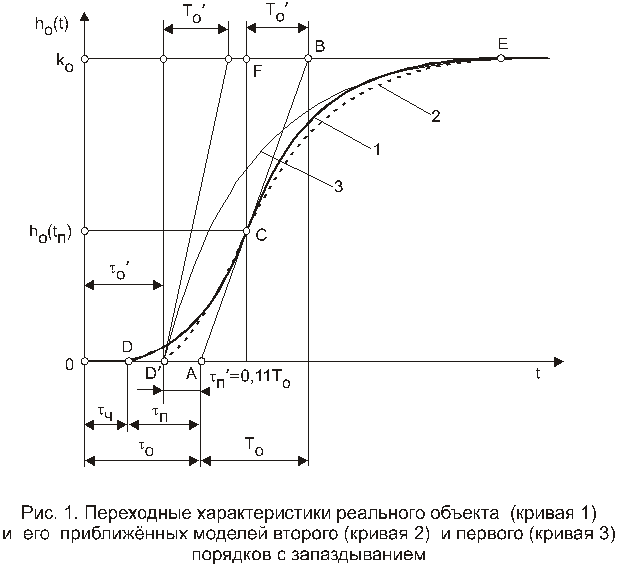 ри
расчете параметров настройки систем
управления объектами сs-образными
переходными характеристиками используют
либо непосредственно параметрыkо,
Tо,
о,
чип,
которые обобщённо характеризуют статику
и динамику реальных объектов, либо
используют упрощённые модели объекта,
коэффициенты которых однозначно
выражаются через указанные экспериментальные
параметры.
ри
расчете параметров настройки систем
управления объектами сs-образными
переходными характеристиками используют
либо непосредственно параметрыkо,
Tо,
о,
чип,
которые обобщённо характеризуют статику
и динамику реальных объектов, либо
используют упрощённые модели объекта,
коэффициенты которых однозначно
выражаются через указанные экспериментальные
параметры.
Если заведомо известно, что описываемый объект состоит из одинаковых одноёмкостных объектов, соединенных последовательно, то наиболее точное приближение к s-образной характеристике обеспечивает передаточная функция
W
(1)
т.е. наилучшей моделью динамики объекта является последовательное соединение n инерционных звеньев первого порядка с одинаковыми постоянными времениTо i и звена запаздывания сч. Модель (1) служит удовлетворительной аппроксимацией и в тех случаях, когда объект состоит из неодинаковых звеньев. Важно только, чтобы у такого объекта число неодинаковых звеньев было не меньше трех, а их постоянные времени не сильно отличались друг от друга. Достоинством модели (1) является возможность воспроизводить с её помощью относительно большое полное запаздываниео, состоящее только из переходного запаздыванияп.
Хорошее приближение к s-образной переходной характеристике даёт передаточная функция с равными постоянными времени и запаздыванием
W
(2)
где Tо i = Tо / 2,72;
о = о - п = о – 0,107 Tо;
п – переходное запаздывание модели (1) приn = 2.
Иначе говоря, параметры данной модели однозначно выражаются через параметры Tо иоэкспериментальной переходной характеристики:
W
(3)
Передаточным функциям (2) и (3) на рис.1 соответствует кривая 2, начинающаяся в точке D. Очевидно, что при данном способе аппроксимации почти весь интервало должен быть смоделирован как чистое запаздывание, т.е. ч = о.
Переходную s-образную характеристику можно приближенно заменить экспонентой с запаздыванием (кривая 3 на рис.1). ПараметрыTо ио передаточной функции
Wо(p) = kо exp(-pо) / (Tо p + 1) (4)
выбирают так, чтобы экспонента пересекала аппроксимируемую кривую в двух точках и проходила в среднем наиболее близко к ней. Очевидно, что такое математически нестрогое требование может быть выполнено при разных сочетаниях параметров Tо ио. Один из возможных способов определения параметров модели (4), изложенный в [4], заключается в следующем.
Полагают, что экспонента модели (4) начинается в той же точке D, что и модели второго порядка, т.е. что
о о – 0,11 Tо, (5)
а постоянную времени определяют как разность между абсциссами точки B и точки перегибаC, т.е.
Tо = tB–tп .
Ордината hо(tп) точки перегиба у объектов с одинаковыми постоянными времени лежит в диапазоне (0,26…0,41) kо, причём меньшее значение относится к случаю, когда объект имеет второй порядок, а большее – к объектам сn 9. Отсюда следует, что
Tо (0,59…0,74) Tо , (6)
и передаточная функция (4) с учетом (5) и (6) может быть записана в виде
Wо(p) = kо exp [-p (о – 0,11 Tо)] / (0,67 Tо p + 1) . (7)
В большинстве практических случаев модель первого порядка с запаздыванием (7) является достаточно точной и в то же время достаточно простой. При значениях о/Tо >0,5 удовлетворительной моделью может служить передаточная функция
Wо(p) = kо exp [-p о] / (0,67 Tо p + 1) . (8)