

2 Логические элементы: -и, -или, -не.
Основными составляющими частями всех цифровых устройств явл-ся логические элементы. Логический элемент—система, которая основываясь на выходных сигналах решает, что ей ответить на выходе «да» или «нет». Логич. элементы могут быть собраны на переключателе, реле, диодах, транзисторах, на интегральных схемах.
Логический элемент и (вентиль) («все или ничего»)
Таблица
истинности устанавл. жесткую связь
между входами выходами. Замкнутое
состояние ключа соответствует логической
единице, разомкнутое— логическому
нулю. Особенностью логич. элемента И
явл. то, что входной сигнал А связан
логич. функцией И с входным сигналом В,
в результат на выходе появл. сигнал У.
Сокращенная запись данного выраж. наз.
Булевым выражением: А =У
=У
Логический элемент или (что-нибудь или все)
Особенностью логич. эл-та ИЛИ явл-ся то, что на его выходе появл. сигнал низкого логич. уровня в том случае, если на оба входа также поданы сигналы низкого логич. уровня. Булево выражение: Y=А+В
Логический элемент не (инвертор)
«НЕ» - логический элемент, выполняющий над входными данными операцию логического отрицания. Данный элемент, имеющий один выход и только один вход, называют еще инвертором, поскольку он на самом деле инвертирует (обращает) входной сигнал. На рисунке приведено условное обозначение логического элемента «НЕ».
А=Ā Черточка над А обозначает, что сигнал инвертирован и читается «не А».
3 Позиционные аср: характер переходных процессов, показатели качества, область применения.
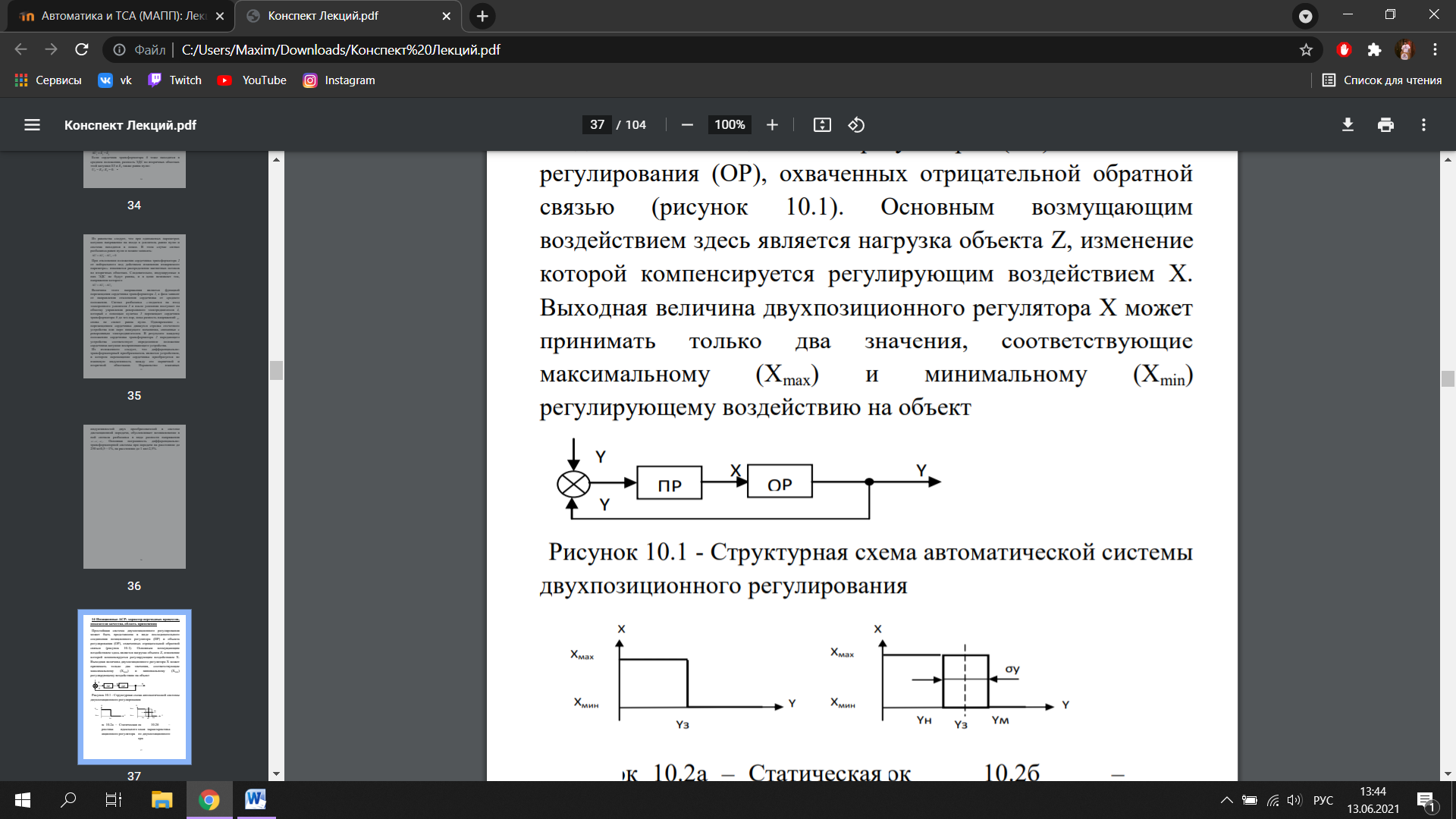
Простейшая система двухпозиционного регулирования может быть представлена в виде последовательного соединения позиционного регулятора (ПР) и объекта регулирования (ОР), охваченных отрицательной обратной связью.
Основным возмущающим воздействием здесь является нагрузка объекта Z, изменение которой компенсируется регулирующим воздействием X. Выходная величина двухпозиционного регулятора Х может принимать только два значения, соответствующие максимальному (Хmах) и минимальному (Хmin) регулирующему воздействию на объект.
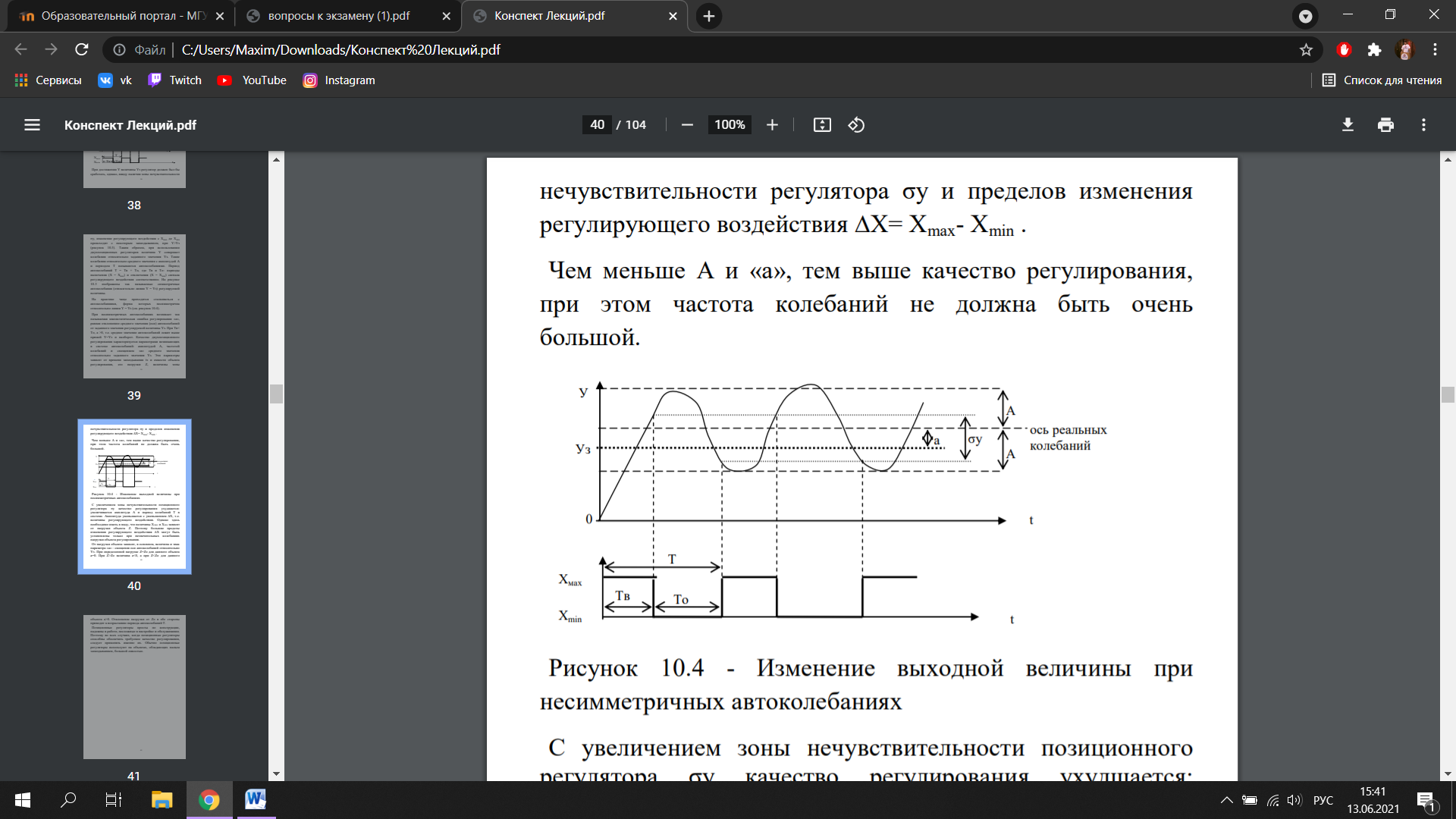
При несимметричных автоколебаниях возникает так называемая квазистатическая ошибка регулирования «а», равная отклонению среднего значения (оси) автоколебаний от заданного значения регулируемой величины Yз. При Тв< То, а >0, т.е. среднее значение автоколебаний лежит выше прямой Y=Yз и наоборот. Качество двухпозиционного регулирования характеризуется параметрами возникающих в системе автоколебаний: амплитудой А, частотой колебаний и смещением «а» среднего значения относительно заданного значения Yз. Эти параметры зависят от времени запаздывания tз и емкости объекта регулирования, его нагрузки Z, величины зоны нечувствительности регулятора σу и пределов изменения регулирующего воздействия ∆Х= Хmах- Хmin …..
С увеличением зоны нечувствительности позиционного регулятора σу качество регулирования ухудшается: увеличивается амплитуда А и период колебаний Т в системе. Амплитуда уменьшается с уменьшением ∆Х, т.е. величины регулирующего воздействия. Однако здесь необходимо иметь в виду, что величины Хmах и Хmin зависят от нагрузки объекта Z. Поэтому большие пределы изменения регулирующего воздействия ∆Х могут быть установлены только при незначительных колебаниях нагрузки объекта регулирования…..
От нагрузки объекта зависит, в основном, величина и знак параметра «а» - смещения оси автоколебаний относительно Yз. При определенной нагрузке Z=Zо для данного объекта а=0. При Z>Zo величина а<0, а при Z<Zо для данного объекта а>0. Отклонение нагрузки от Zо в обе стороны приводит к возрастанию периода автоколебаний Т.
Позиционные регуляторы просты по конструкции, надежны в работе, несложные в настройке и обслуживании. Поэтому во всех случаях, когда позиционные регуляторы способны обеспечить требуемое качество регулирования, следует применять именно их. Обычно позиционные регуляторы используют на объектах, обладающих малым запаздыванием, большой емкостью.