

40 Программируемые логические контроллеры (плк) типы и архитектура плк.
Программи́руемый логи́ческий контро́ллер (сокр. ПЛК; более точный перевод на русский — контроллер с программируемой логикой), программируемый контроллер — промышленный контроллер, используемый для автоматизации технологических процессов.
В качестве основного режима работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьёзного обслуживания и практически без вмешательства человека.
Иногда на ПЛК строятся системы числового программного управления станков.
ПЛК — устройства, предназначенные для работы в системах реального времени.
ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности:
в отличие от микроконтроллера (однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — областью применения ПЛК обычно являются автоматизированные процессы промышленного производства в контексте производственного предприятия;
в отличие от компьютеров, ориентированных на принятие решений и управление оператором, ПЛК ориентированы на работу с машинами через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы;
в отличие от встраиваемых систем ПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования.
В системах управления технологическими объектами логические команды, как правило, преобладают над арифметическими операциями над числами с плавающей точкой, что позволяет при сравнительной простоте микроконтроллера (шины шириной 8 или 16 разрядов), получить мощные системы, действующие в режиме реального времени. В современных ПЛК числовые операции в языках их программирования реализуются наравне с логическими. Все языки программирования ПЛК имеют лёгкий доступ к манипулированию битами в машинных словах, в отличие от большинства высокоуровневых языков программирования современных компьютеров.
41 Структурная схема и основная функция устройства дискретного вывода.
Основная функция дискретного вывода – это функция ключа управляющего источником тока или напряжение.
Это может быть полупроводниковый ключ – для коммутации малых нагрузок с высокой скоростью
Или релейный ключ – для коммутации больших нагрузок с меньшей скоростью.
Каждый бит выходного регистра может использоваться для управления каких-либо объёмов
Число замыканий можно задавать программно в УВК (управляющий вычислительный комплекс).
42 Методы измерений.
Выделяют 2 группы методов:
Метод непосредственной оценки – измеряемая величина оправляется по шкале прибора прямого действия (в нем сигнал измерительной информации передается в одном направление), характеризуется высокой скоростью, не высокой точностью (давление по манометру)
Методы сравнения с мерой – измеряемая величина сравнивается с другой физической величиной воспроизводимой мерой:
Дифференциальный метод – часть измеряемой величины уравновешивается мерой, а остальная часть по шкале прибора (весы настольные циферблатные)
Нулевой метод – измеряемая величина сравнивается с мерой, разность доводиться до нуля ( весы открытые)
Достоинство: высокая точность
Недостатки: продолжительность, необходимость разнокалиберных мер, цена.
М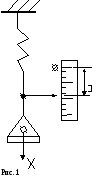 етод
замещения – метод сравнения
с мерой, в котором измеряемую величину
замещают известной величиной,
воспроизводимой мерой
етод
замещения – метод сравнения
с мерой, в котором измеряемую величину
замещают известной величиной,
воспроизводимой мерой
Метод
дополнительный – может
служить взвешивание груза X на
равно плечных весах (рис.2), когда масса
груза определяется массой гирь,
уравновешивающих воздействие груза на
рычаг весов. Состояние равновесия
определяется по положению указателя
нуль-индикатора, который в этом 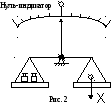 случае
должен находиться на нулевой отметке.
случае
должен находиться на нулевой отметке.