

2. Способность к самовыравниванию.
Способность к самовыравниванию влияет на выбор закона регулирования след. образом:
Пропорциональный закон (П-закон) используется для объектов управления с положительным самовыравниванием и без самовыравнивания (нейтральные) при небольших изменениях входных величин.
Интегральный закон (И-закон) нельзя использовать для объектов с отрицательным самовыравниванием (большое самовыравнивание) и объектов без самовыравнивания (нейтральные). При этом, запаздывание должно быть мало.
Пропорционально-интегральный закон (ПИ-закон) используется для объектов управления с положительным самовыравниванием и без самовыравнивания (нейтральные) при больших, но плавных нагрузках (для объектов, где необходима большая точность).
Пропорционально-интегрально-дифференциальный закон (ПИД-закон) используется для объектов с большим запаздыванием и большой инерционностью, при этом в объекте частое изменение входных величин.
3.
Запаздывание
- отношение
времени запаздывания к постоянной
времени
 .
.
Влияние на структуру и закон регулирования:
 < 0,2 - подойдут
двухпоз. регуляторы
< 0,2 - подойдут
двухпоз. регуляторы
 - линейный закон.
При этом, для отношений:
0,2 - 0,4 -
П-закон
0,4 - 0,7 - ПИ-закон
1 - ПИД-закон
- линейный закон.
При этом, для отношений:
0,2 - 0,4 -
П-закон
0,4 - 0,7 - ПИ-закон
1 - ПИД-закон
> 1 - необходимы многоконтурные САР.
1.24. (Наталья Марченкова)Основные линейные законы регулирования: уравнения, основные свойства, примеры.
1. Пропорциональный закон регулирования (П-) - регуляторы, отклонение регулируемой величины которых от заданного значения вызывает перемещение регулирующего органа на величину, пропорциональную величине этого отклонения.
Пропорциональные регуляторы могут применяться для регулирования процессов, протекающих в объектах как обладающих, так и не обладающих самовыравниванием. Системам автоматического регулирования с П-регуляторами свойственно наличие статической ошибки, т. е. остаточного отклонения регулируемой величины. Величина этого отклонения тем больше, чем больше изменение регулируемой величины и чем больше предел пропорциональности. Увеличивая коэффициент усиления регулятора, можно уменьшить статическую ошибку регулирования, однако полностью устранить ее нельзя.
Примером системы с П-регулятором может служить система автоматического наполнения емкости (сливной бачок).
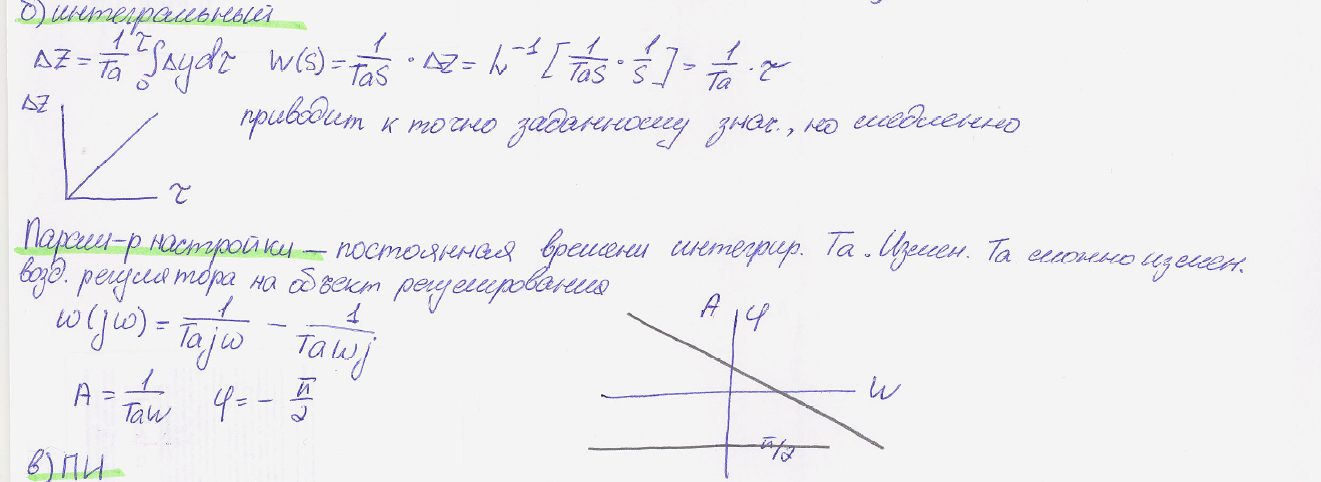
2. Интегральный закон регулирования (И-) - Интегральные регуляторы производят перемещение регулирующего органа пропорционально интегралу отклонения регулируемой величины до тех пор, пока не восстановится ее заданное значение. Достоинство данного принципа регулирования в отсутствии статической ошибки, т.е. при возникновении ошибки регулятор будет увеличивать управляющее воздействие, пока не добьется заданного значения регулируемой величины. Недостаток – в низком быстродействии.
3. Пропорционально-интегральный закон (ПИ-) - регуляторы, изменение
выходной величины которых пропорционально как изменению входной вели-
чины, так и интегралу ее изменения.
Для улучшения статических свойств ПИ-регуляторов их обратная связь
осуществляется не по положению регулирующего органа, как в П-регуляторах,
а по скорости его перемещения, где используется гибкая обратная связь. Такая
связь работает только в переходном режиме регулирования.
Таким образом, аналогично И-регулятору ПИ-регулятор поддерживает
постоянное значение регулируемой величины независимо от нагрузки объекта,
при отклонении ее от заданного значения в начальный момент времени пере-
местит регулирующий орган на величину, пропорциональную величине откло-
нения (как П-регулятор), а затем будет продолжать перемещение регулирующе-
го органа до исчезновения статической ошибки (за счет гибкой обратной связи),
т. е. приведет регулируемую величину к заданному значению.

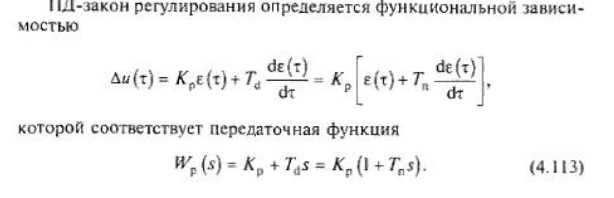
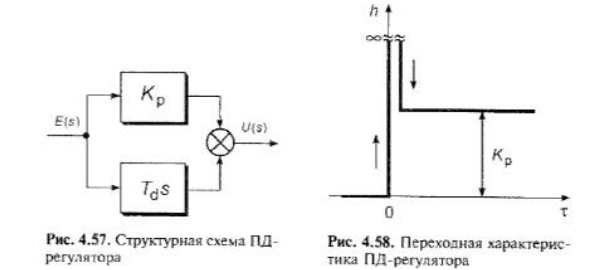
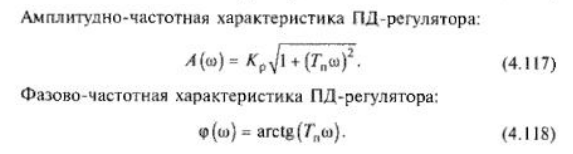
4. Пропорционально-дифференциальный закон (ПД-) - ПД –регулятор имеет два параметра настройки: предел пропорциональности и время дифференцирования. При наличии Д-составляющей выходная величина регулятора изменяется с некоторым опережением относительно входной величины, пропорциональным скорости ее изменения.
При наличии в законе регулирования Д –составляющей регулятор реагирует и на изменения скорости входной величины, т.е. на интенсивность ее изменения. Такой регулятор вступает в работу быстрее, чем П –регулятор. Введение в закон регулирования воздействия по производной приводит к усилению влияния регулятора на переходный процесс, при этом сокращается время переходного процесса и уменьшаются колебания регулируемой величины.

5. Пропорционально-интегрально-дифференциальный закон (ПИД-) - ПИД-регулятор объединяет в себе функции ПИ- и ПД-регуляторов. Пропорциональная составляющая вырабатывает сигнал, который противодействует отклонению регулируемой величины в данный момент времени.
Интегральная составляющая накапливает результирующее значение, нивелируя, таким образом, недостаток П-регулятора – наличие статической ошибки. ПИД-регулятор обладает Д-составляющей, которая как бы прогнозирует отклонение от задания и следит за скоростью отклонения, поэтому является самой быстрой в данном алгоритме. По сути, это является преимуществом и недостатком одновременно. При скачкообразном изменении регулируемой величины ПИД-регулятор в начальный момент времени оказывает бесконечно большое воздействие, величина которого затем резко падает до значения, определяемого пропорциональной составляющей, после чего начинает оказывать влияние интегральная составляющая регулятора.
1.25. (Ася Королькова)Классификация и особенности законов регулирования.
Классификация и особенности законов регулирования.
1) Линейные
П- регуляторы используются в объектах с небольшим запаздыванием и изменением нагрузки, а также в системах, где допускается статическая ошибка и не используются при циклическом изменении параметров объекта.
Передаточная функция П-регулятора: Wп(s) = K1. Принцип действия заключается в том, что регулятор вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка Е, тем больше управляющее воздействие Y).
И - регуляторы используются для объектов с самовыравниванием и небольшими запаздыванием и изменением нагрузки.
Передаточная функция И-регулятора: Wи(s) = К0/s. Управляющее воздействие пропорционально интегралу от ошибки.
Д-регулятор - дифференцирующий регулятор
Передаточная функция Д-регулятора: Wд(s) = К2*s. Д-регулятор генерирует управляющее воздействие только при изменении регулируемой веричины: Y= K2 * dE/dt.
ПИ - регуляторы применяются в объектах с любой емкостью, с большим запаздыванием, а также при больших и медленных изменениях нагрузки.
ПИ-регулятор представляет собой сочетание П- и И-регуляторов. Передаточная функция ПИ-регулятора: Wпи(s) = K1 + K0/s.
ПД - ПД-регулятор представляет собой сочетание П- и Д-регуляторов. Передаточная функция ПД-регулятора: Wпд(s) = K1 + K2 s.
ПИД - регуляторы применяются в объектах с любой емкостью, при требуемой малой статической ошибке регулирования и при больших запаздываниях в объекте.
ПИД-регулятор представляет собой сочетание П-, И- и Д-регуляторов. Передаточная функция ПИД-регулятора: Wпид(s) = K1 + K0 / s + K2 s.
2) Нелинейные
1) функциональные нелинейные законы регулирования,
Функциональными будем называть такие нелинейные законы регулирования, при которых регулирующее воздействие на объект выражается в виде нелинейной функции от отклонения регулируемой величины, представляющей собой входную информацию для системы регулирования.
Данный класс может содержать в себе как статические, так и динамические нелинейности. Примеры статических нелинейностей в законе регулирования:
2)логические нелинейные законы регулирования,
Логические нелинейные законы регулирования могут быть связаны также с изменением структуры системы регулирования. Например, при помощи логического устройства можно включать и выключать сигналы управления по первой и второй производным и по интегралу, в зависимости от сочетания значений отклонения регулируемой величины х и скорости отклонения ее .
3) оптимизирующие нелинейные законы регулирования,
Часто оптимальный нелинейный закон регулирования состоит в переключении управляющего воздействия (при определенных состояниях системы) с одного максимально возможного значения на другое (противоположного знака). Моменты переключения в целом определяются сложными комбинациями значений нескольких переменных и их производных.
4) параметрические нелинейные законы регулирования.
В предыдущих типах законов регулирования вводились отклонения регулируемой величины от некоторых заданных ее программных значений. При параметрической программе управления закон регулирования может выражаться в виде нелинейной функции текущих координат, в которых задается параметрическая программа.
1.26. (Полина Тапехина) Пропорциональный закон регулирования: уравнение, основные свойства, характеристики.
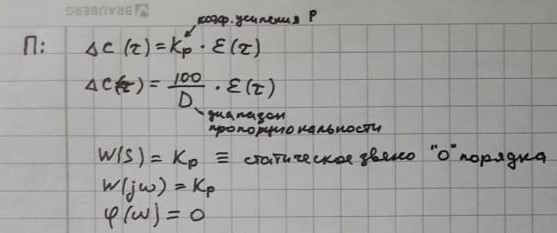
Пропорциональный закон регулирования - линейный закон, отражающий прямо пропорциональную зависимость между изменением управляющего воздействия и погрешностью регулирования

Кр - коэффициент усиления, являющийся параметром настройки пропорционального регулятора
В промышленности параметр настройки п-регулятора часто представляют в виде величины D, обратная коэфу усиления и выражается в %

D - диапазон пропорциональности(или еще полоса пропорциональности), показывает какому отклонению управляемой величины соответствует перемещение затвора регулирующего органа из одного крайнего положения в другое
Статистические характеристики графически:

Чем больше Кр, тем круче стат характеристика и меньше статистическая погрешность
При Кр=0 - отклонение не вызывает перемещение затвора регулирующего органа, равносильно отсутствию регулятора, следовательно нет компенсации возмущающего воздействия.
При
Кр= - п-регулятор не дает статистическую
погрешность, но система неустойчива
- п-регулятор не дает статистическую
погрешность, но система неустойчива
При увеличении Кр мы можем уменьшить стат ошибку, но есть некоторое максимальное значение(зависит от устойчивости системы)
Передаточная функция п-регулятора:
Е- изображение по Лапласу ошибки регулирования
U - изображение по Лапласу выходного сигнала регулятора (управляющего воздействия)
Передаточная функция соответствует стат звену 0-го порядка
Переходная характеристика п-регулятора:

П-регулятор является безынерционным

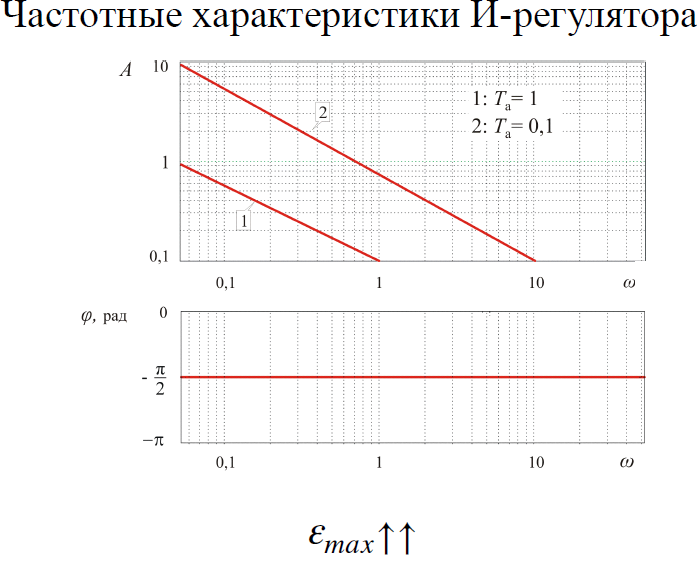
Частотная
передаточная функция:

Амплитудная
частотная характеристика:

Фазовая
частотная характеристика:

Если на вход п-регулятора подать гармонические колебания, то выходная величина изменяется по гармоническому закону без запаздывания
Амплитуды выходных колебаний в Кр раз отличается от амплитуды входных
При увеличении Кр - уменьшается устойчивость, увеличивается колебательность, увеличивается время переходного процесса, но повышается точность регулирования
При уменьшении Кр - устойчивость растет, уменьшается время переходного процесса, уменьшается точность регулирования
Полностью устранить устранить ошибку регулирования невозможно
П-регулятор не относится к промышленным
1.27. (Аня Тафийчук)Пропорциональный и пропорционально-дифференциальный законы регулирования: уравнения, характеристики, основные свойства.
См вопрос 1.24, 1.26
 1.28.(Елена
Нахмурина)
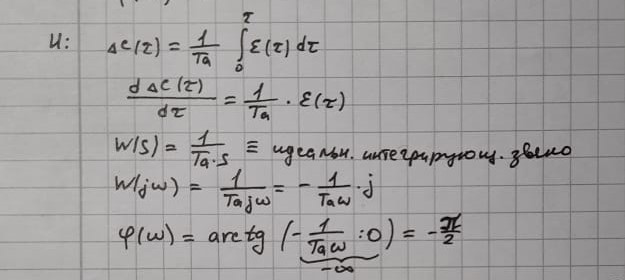
Интегральный
закон регулирования: уравнение,
характеристики, основные свойства.
1.28.(Елена
Нахмурина)
Интегральный
закон регулирования: уравнение,
характеристики, основные свойства.
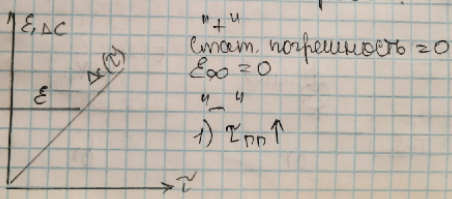
В
данном методе стат погрешность =0 (все
время исполнительное устройство будет
ее устранять). 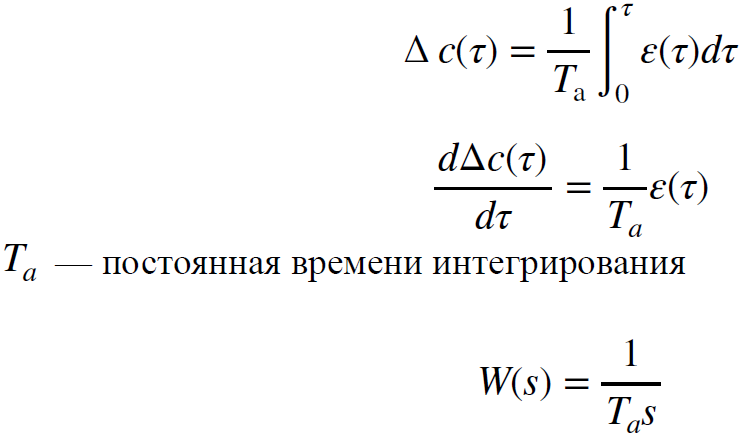
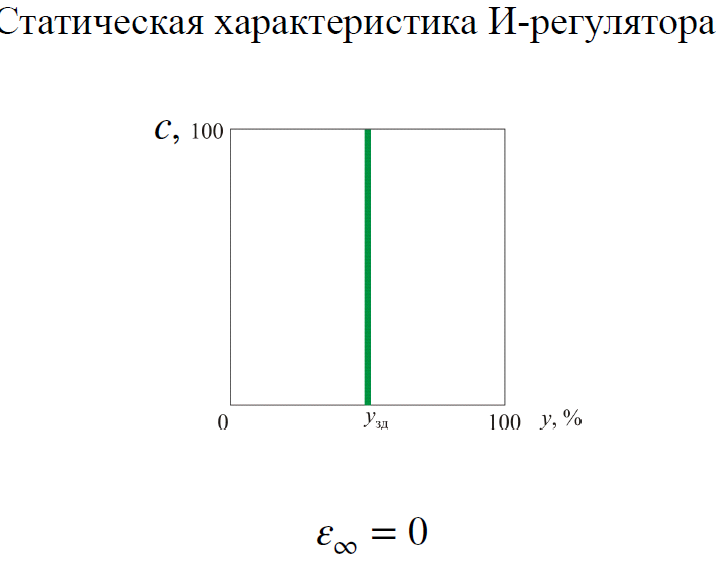
Т.к. нет пропорциональной зависимости,то управляемая величина будет входить на заднное значение при времени стремящемся к 0.
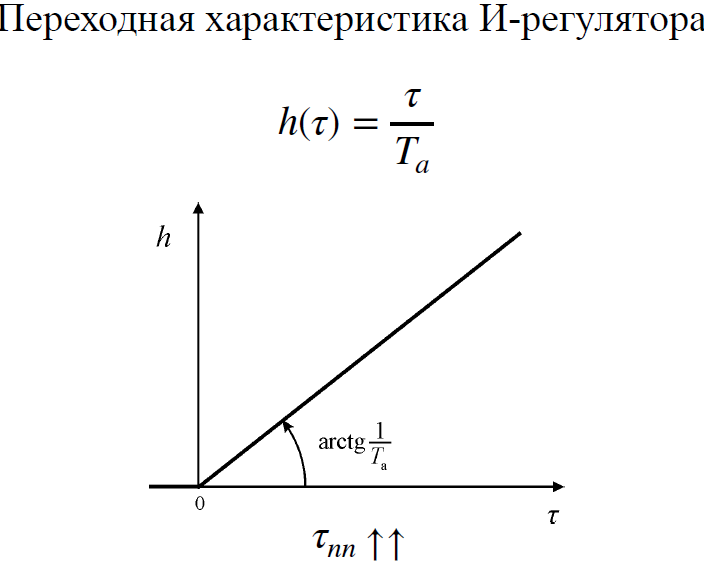
Если погрешность регулирования меняется ступенчато,то управляющее воздействие(командный сигнал) будет меняться с постоянной скоростью.
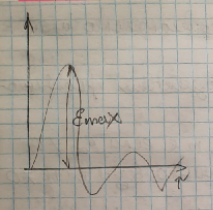
Управляющий параметр успевает очень сильно отклонится от нужного значения. Большая максимальная погрешность.

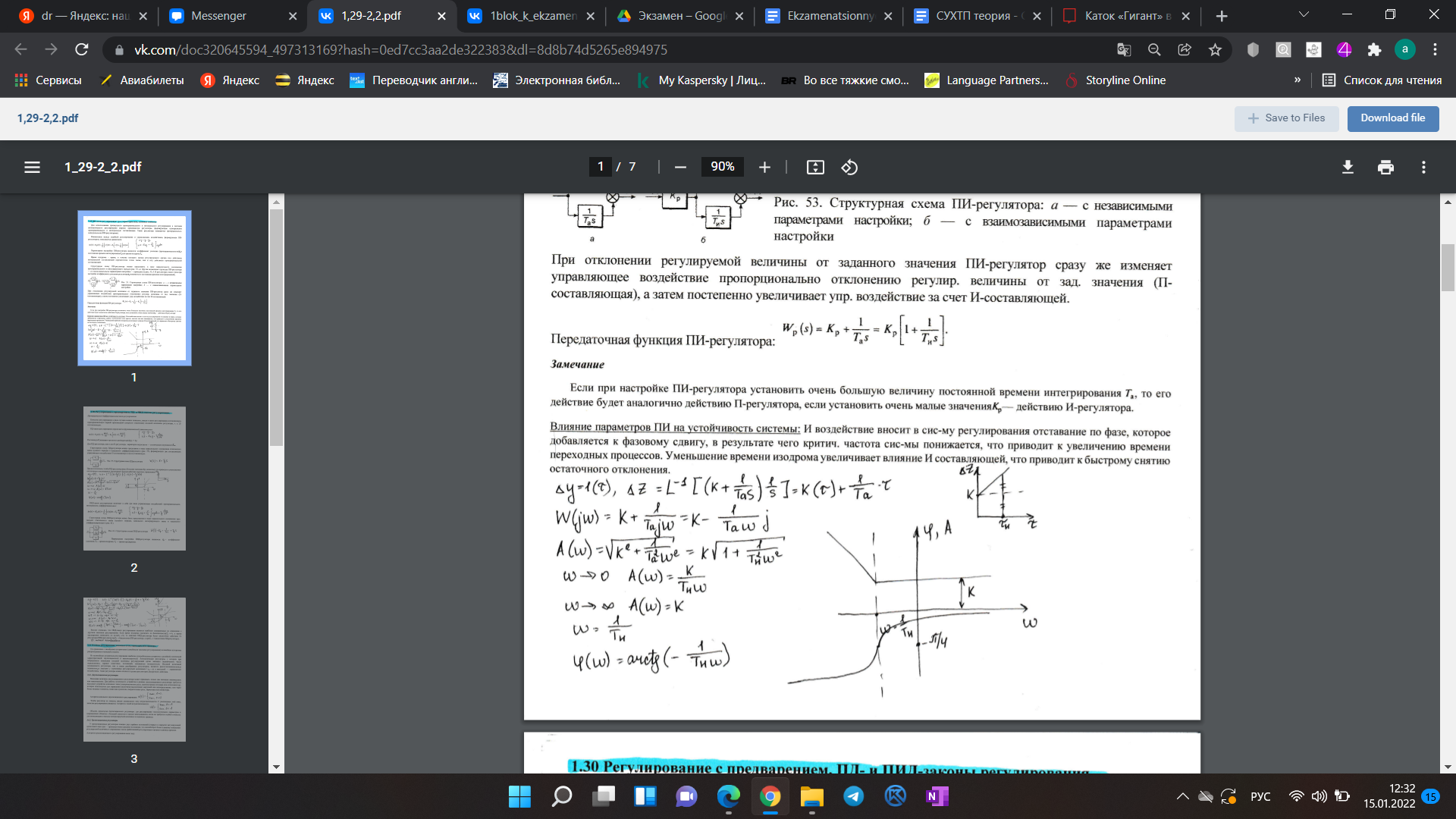
 1.29.(Алина
Огнева)
Пропорционально-интегральный
закон регулирования: уравнение,
характеристики, основные свойства.
1.29.(Алина
Огнева)
Пропорционально-интегральный
закон регулирования: уравнение,
характеристики, основные свойства.

1.30. (Дарья Локтева)Пропорционально-интегрально-дифференциальный закон регулирования: уравнение, характеристики, основные свойства.
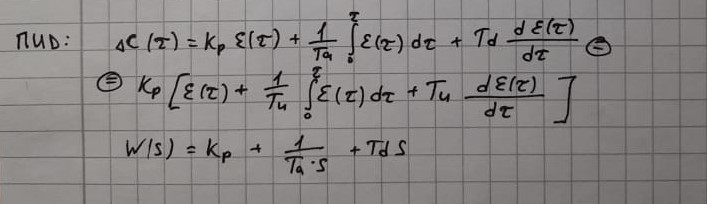
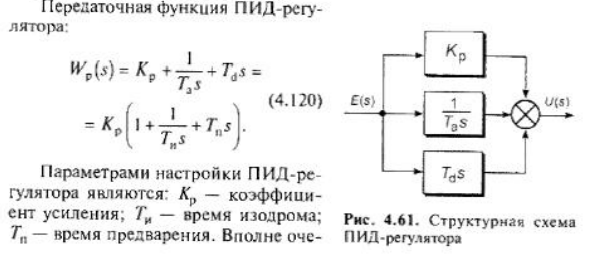
ПИД-закон регулирования включает в себя три вида управляющих воздействий: пропорциональное интегральное и дифференциальное.
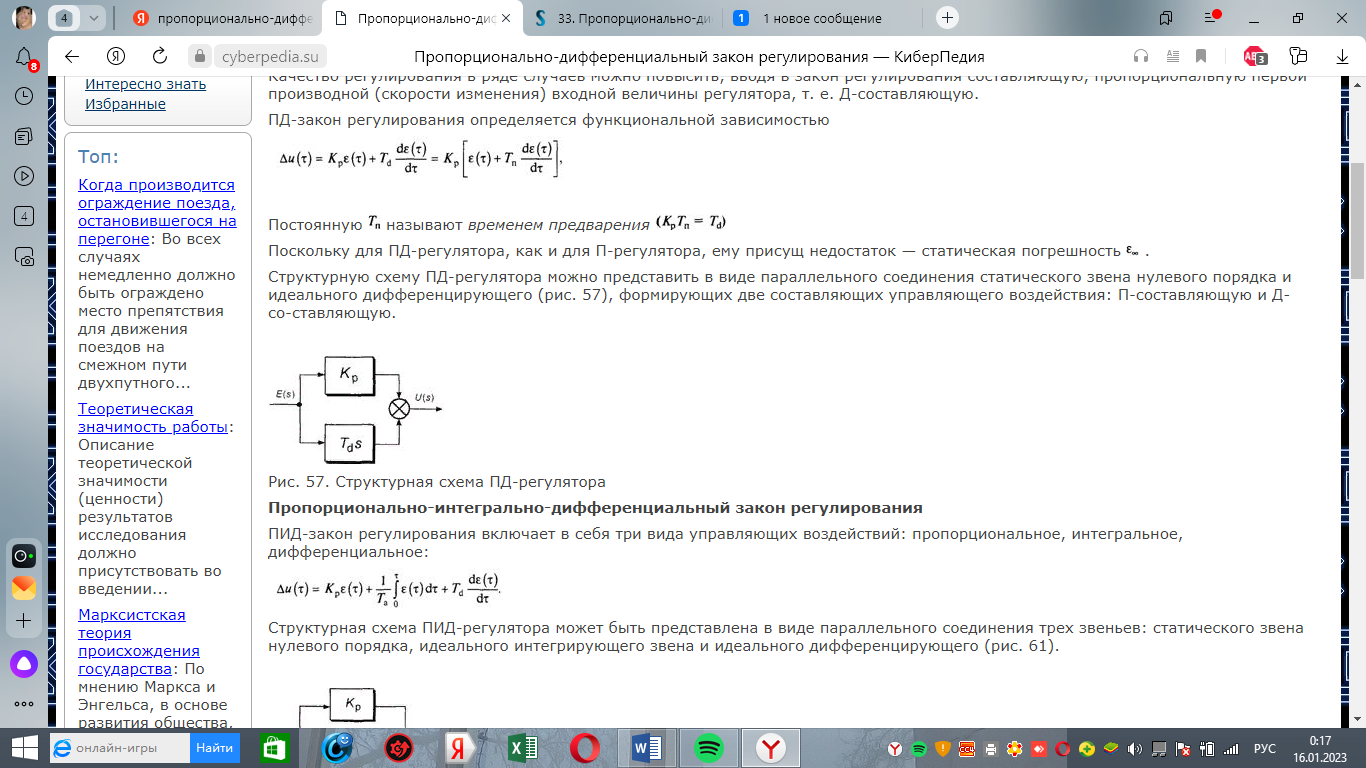
Структурная схема ПИД может быть представлена как параллельное соединение трех звеньев: статического звена нулевого порядка, идеального интегрирующего звена и идеального дифференцирующего.
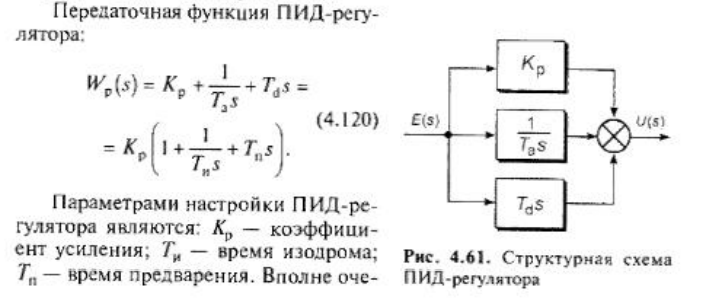
(Ти - время изодрома в знаменателе дроби, кому не видно)
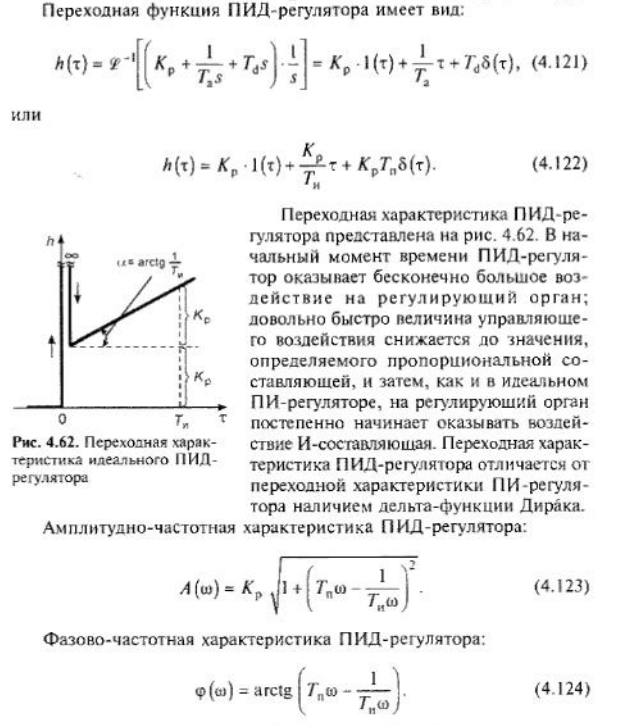

ПИД-регулятор имеет минимальные статическую и максимальную ошибки, минимальное время переходного процесса, но регулировка трех параметров (Ти (время изодрома), Тп ( время предварения) и Кр(коэф усиления) настройки тяжелее). Нецелесообразно применять регулирование ПИДом, если отношение Ти/Тп<4 так как в таком будет отсутствовать робастность системы).
1.31.(Павел Сердюченко) Регулирование с предварением. Пропорционально-дифференциальный и пропорциональноинтегрально-дифференциальный законы регулирования.
ПД-закон регулирования
ПИД-закон
регулирования
1.32. (Елизавета Романова)Релейные (позиционные) регуляторы: основные свойства, характеристики.
Двухпозиционные регуляторы – простейшая разновидность позиционных регуляторов. Двухпозиционное регулирование применяется для самых различных величин, таких как температура, давление, уровень и другие при условии невысоких требований, предъявляемых к качеству регулирования.
Двухпозиционные (релейные) регуляторы – это автоматические регуляторы, у которых регулирующее воздействие либо включено, либо выключено с помощью переключательного (релейного) элемента, что создает колебательный процесс регулирования. Для них постоянные незатухающие колебания регулируемой величины будут нормальным режимом функционирования. Это их основной недостаток.
Релейный регулятор формирует одно из двух конечных значений регулирующего воздействия – максимальное Xpmax и минимальное Xpmin.
То, какое из этих двух воздействий будет подано на ИУ в конкретный момент, определяется знаком величины рассогласования E и видом регулятора – прямой или обратный.
Двухпозиционный регулятор относят к регуляторам прерывистого действия.
Двухпозиционный регулятор обязательно имеет в своем составе переключательный элемент, формирующий два уровня регулирующего воздействия – «включено» и «выключено». Наиболее часто в качестве переключательного элемента применяются реле, отсюда второе название двухпозиционных регуляторов – релейные.
Набор состояний переключательного элемента позиционного регулятора называют позициями. У двухпозиционного регулятора их две, отсюда и название регулятора – двухпозиционный.
Позиции двухпозиционного регулятора называют верхней и нижней. Верхней позицией считают ту, которая соответствует большему значению регулирующего воздействия, нижней – меньшему значению. В ходе своей работы двухпозиционный регулятор включает либо верхнюю позицию, либо нижнюю.
Значения позиций регулятора выражаются в единицах измерения регулирующего воздействия.