

ДОРОЖНЫЕ МАШИНЫ (Часть 1)
.pdf51
Второй случай рассматривается ниже.
Рассмотрение действия сил при установившемся движении следует начать с простого клина при следующих допущениях: клин абсолютно острый, трение
задней грани клина о грунт отсутствует.
В этих условиях на плоский клин действуют реакции грунта, собственный вес клина и реакция связи, действующая в вертикальном направлении.
На плоский клин со стороны грунта действует (рис. 25) равнодействующая N нормальных сил и сила трения μ1N по рабочей грани клина. Проектируя эти силы на оси X и Z, получим
R |
x |
|
R |
z |
|
Wp N sin
Pн N cos
|
N |
1 |
|
1 N
cos sin
;
.
(26)
(27)
Сила Rx = Wp определяет необходимое тяговое усилие Т и находится опытным путем или по уравнению (9). Тогда абсолютное значение равнодействующей нормальных сил определится по формуле
Направление (знак) и величина силы Rz = Рн зависят от численных значений коэффициента внешнего трения μl и угла резания δ. Так, например, при δ > 45° и определенных значениях μ1 происходит выталкивание клина, т. е. Rz < 0, и для обеспечения равновесия необходимо приложить еще дополнительную силу — вес клина или усилие, передаваемое через связь рабочего органа с машиной.
В частном случае, когда cos δ = μl sin δ, т. е. φ1 = 90° — δ, имеем Rz = 0.
Для определения отношения
R R
z x
делим уравнение (27) на уравнение (26):
где
φ1 — угол внешнего трения.
Если рассматривать действие сил на простой клин в действительных условиях, т. е. с учетом его затупления (рис. 26), то к силам, действующим на клин, добавятся реакции грунта на площадку затупления R1 и R 2. На рис. 27 показаны: х — проекция контура ME затупленного клина на линию аа и z — проекция того же контура на перпендикуляр к этой линии. Значения R1 и R 2 (рис. 26) найдутся из следующей схемы работы затупленного клина. Затупленный клин

52
движется по линии аа, касаясь ее в точке М (рис. 27). Вершина Е клина разделяет снимаемую стружку на две части, на которых нижняя при движении зуба частично выдавливается вверх, а частично уплотняется и вдавливается криволинейной поверхностью ME клина вниз за линию
аа.
Значения реакций Йг и R2 можно определить по формулам
где |
|
|
b — ширина клина в см; |
|
|
k' — предельная |
несущая способность |
грунта в кГ/см2(табл. 19); |
k2 — реакция грунта в кГ на 1 см ширины клина (см. табл. 19). |
||
Следует учесть, |
что в этом случае на |
наклонную плоскость клина будет передаваться |
не вся сила тяги, идущая на резание, так как часть ее будет восприниматься режущей кромкой клина.
Тогда равнодействующая сил, нормальных к наклонной поверхности клина (рис. 26), будет определяться
где

53
Для зубьев величина z не должна превышать 5—8 мм. Вертикальная составляющая Rz будет равна
горизонтальная составляющая
а отношение их
Силы, действующие на косой клин. Аналогичные теоретические зависимости для работы трехгранного клина с острой кромкой (плоский нож грейдера, землеройного струга, дисковый нож грейдер-элеватора и т.д.) могут быть получены, если исходить из условия, что все силы, действующие на рабочую плоскость клина, независимо от происхождения сводятся к равнодействующей N нормальных сил и силам трения μ1N.
Система сил, которая может возникнуть на задней грани независимо от сил, действующих на рабочую плоскость, при этом не учитывается.
Трехгранный клин получается пересечением трех взаимно перпендикулярных осей координат наклонной плоскостью (рис. 28).
Положение косо поставленного ножа во время резания определяют угол δ установки рабочего органа в вертикальной плоскости и угол φ установки рабочего органа в плане к направлению движения. По теории клина частица грунта поднимается на нож не по нормальному направлению к лезвию, а под углом 90° — ψ1 к оси X. На рабочей плоскости клина линия действия сил трения μ1N образует с нормалью к лезвию угол ω.
Из геометрических соотношений следует, что
Составляющую Rx по оси X, которая определяет необходимое для движения клина усилие,

54
получим, проектируя силы N и μ1N на ось X:
Нормальные и касательные реактивные сопротивления в плоскости резания, т. е. усилия, действующие нормально к режущей кромке и вдоль нее, могут быть определены проектированием сил N и μ1N на эти направления:
Переход к реактивным сопротивлениям по координатным осям X и Y к плоскости XOY может быть сделан согласно геометрической схеме, показанной на рис. 29, откуда следует, что
где значение угла β' может быть найдено по формуле
Вертикальная составляющая Rz определяется из уравнения проекций сил на ось Z:
Используя полученные значения Rx, Ry, Rz, находим
Для граничных углов, определяющих клин, т. е. когда δ = 90° (работа косого штампа) и φ = 90° (лобовое резание), соотношения между составляющими реакции грунта принимают следующий вид:
Для
кривизны
невращающегося дискового ножа
1 |
0 |
выведенные зависимости |
|
R |
|||
|
|
грейдер-элеватора (если ренебречь влиянием
ля составляющих реактивного сопротивления
грунта будут такими же. При работе с затупленными ножами необходимо по аналогии с предыдущим случаем учесть дополнительную реакцию грунта, направленную вверх. Для косого клина с учетом угла захвата φ эта реакция R2 найдется из выражения

55
Равнодействующая сил, нормальных к наклонной плоскости косого клина с учетом силы R1 (рис. 26), может быть определена по формуле
Тогда
и отношение
Расчетные соотношения Rz / Rx и Ry / Rx для некоторых углов при φ = 45° (по данным М. И. Эстрина) применительно к дисковому ножу грейдер-элеватора Д-192 приведены ниже:
Значения независимых переменных: |
|
|
|
|
|
|
|
|||
угол δ в гряд |
.... |
47 |
58 |
62 |
47 |
58 |
62 |
47 |
58 |
62 |
коэффициент трения μ1 |
|
0,3 |
|
|
0,5 |
|
|
0,7 |
|
|
Соотношения: |
|
|
|
|
|
|
|
|
|
|
Rz / Rx ............ |
0,723 0,471 0,415 0,505 0,320 0,277 0,413 0,206 0,177 |
|
|
|
||||||
Ry / Rx ............ |
0,598 0,567 0,556 0,381 0,374 0,327 0,271 0,232 0,231 |
|
|
|
||||||
Эти же соотношения для плоского ножа приведены в табл 20.
Для определения числовых значений сил Ry и Rz при расчете рабочего органа на прочность и устойчивость хода принимается коэффициент трения μ1 равный 0,5.
Опыты на грунтах II категории показали, что при лобовом резании (φ = 90°) боковая составляющая Ry практически равна нулю.
Оптимальными по энергоемкости углами установки дисковых ножей являются углы φ = 40 ÷ 50° и δ = 40 ÷ 50°.
Для плоских ножей на грунтах II категории было получено
отношение |
Rz |
= 0,330 ÷ 0,668. |
|
Rx |
|||
|
|
Из табл. 20 следует, что для машин с системой прямых ножей (струг Д-264) вертикальная составляющая резания не превосходит 45% тягового усилия, а горизонтальная составляющая по оси у - 15%.

56
Определение соотношений между Rx, Ry, Rz производилось при условии, что известно нормальное давление N на наклонную плоскость клина (рабочего органа). Рекомендуется принимать за горизонтальную составляющую Rx сопротивление резанию, определяемое опытным путем или по эмпирическим уравнениям. Тогда не представит особых затруднений определение абсолютных значений составляющих Rz, Ry и нормального давления N.
Для различных землеройных машин нормальное давление на наклонную плоскость, а следовательно, и составляющие Rx, Ry и Rz будут определяться не только усилиями резания грунта. Ряд побочных сопротивлений, возникающих при работе этих машин, в особенности скрепера, будет влиять на эти величины.
Процесс выглубления рабочего органа можно рассматривать в одном из двух положений: при неподвижной машине или во время движения машины.
В первом случае процесс выглубления можно рассматривать по схеме на рис. 30.
На рабочий орган действуют: вес рабочего органа G, вес грунта Gг, лежащего на рабочем органе, и сопротивление сдвигу Q по поверхности mm1nn1
Тогда усилие Р, необходимое для выглубления рабочего органа, будет равно
при этом G и Gг определяют исходя из размеров рабочего органа и размеров вырезаемой стружки;
где
F = bh — поверхность, по которой происходит сдвиг (условно принимается, что сдвиг происходит по вертикальной стенке, проходящей через острие ножа);
С — сцепление грунта при сдвиге в кГ/см2 (табл. 5 и 6). Процесс выглубления рабочего органа движущейся машины можно рассматривать по схеме на рис. 30.
На рабочий орган так же, как и в предыдущем случае, действуют: вес рабочего органа G, вес грунта Gг, расположенного на рабочем органе, сопротивление грунта сдвигу Q по поверхности mm1nn1. Усилие Р, необходимое для выглубления рабочего органа, будет равно
где G и Gг определяют, как и в предыдущем случае;
Т — сила тяги, приложенная к рабочему органу; μ2 — коэффициент внутреннего трения грунта.
57
§ 17. КОПАНИЕ ГРУНТА ЭКСКАВАТОРАМИ
Понятие копания грунта является более широким, чем понятие резания грунта. В связи с этим касательная сила сопротивления копанию грунта Р01 (преимущественно экскаваторами) рассматривается Н. Г. Домбровским как сумма трех сил:
где
Рр — сопротивление грунта резанию; Рт — сопротивление трению рабочего органа о грунт;
Рп — сопротивление перемещению призмы волочения и движению грунта в ковше. Величины, составляющие силу сопротивления копанию, изменяются для различных
типов грунторазрабатывающих органов. В более развернутом виде формула (30) может быть написана так:
где
k — удельное сопротивление резанию в кГ/см2;
b и h — соответственно ширина и толщина срезаемого пласта грунта в см;
μ1 — коэффициент трения ковша о грунт; |
|
|
|
N1 — давление ковша на грунт в кГ; |
|
|
|
qnp —объем призмы |
волочения, выраженный в |
частях емкости ковша q; |
|
ε — коэффициент |
сопротивления наполнению |
ковша |
и перемещению призмы |
волочения; |
|
|
|
kн — коэффициент наполнения ковша (отношение объема разрыхленного грунта в ковше |
|||
к геометрическому объему ковша). |
|
|
|
Приняв за основу второй член уравнения (5), Н. Г. Домбровский |
предложил для расчета |
||
суммарного касательного усилия копания уравнение |
|
|
|
где
k1 — удельная сила копания, которая включает в себя не только сопротивление резанию, но и все другие сопротивления (трение ковша о забой, сопротивление грунта при его продвижении в ковше и др.), определяется экспериментально применительно к рабочему органу землеройной машины.
Значения k и k1 для экскаваторов и скреперов приведены в табл. 21. Меньшие значения k и k1 относятся к грунтам мягким (при влажности, обусловливающей меньшее сопротивление копанию), большие к крепким (с влажностью, при которой большинство связных грунтов имеют наибольшее сопротивление копанию).

58
Эти значения k1 учитывают сопротивления резанию, все внешние и внутренние силы трения, возникающие при работе и наполнении ковша, а также влияние характерного для машин данного типа наклона траектории ковша к горизонту. Они относятся к моменту, соответствующему предельно возможному заполнению ковша при максимально возможных
сечениях стружки, и к полусвободному копанию (рис. 15) при соотношении bh 0,15 0,33
(толщине стружки h не менее 20 см и ширине b не менее 40 см).
При расширении этих пределов до
h |
0,05 |
0,5 |
|
b |
|||
|
|
0,05 значение k1 указанное в табл. 21,
увеличивается в среднем на 20—25%.
Значения k1 по табл. 21 также отвечают нормальному износу и обычной конструкции ковшовых рабочих органов, снабженных зубьями по передней кромке, имеющей форму прямолинейную или закругленную по радиусу, не меньшему ширины ковша.
Нормальным износом считается затупление, радиус которого порядка 2—3 мм для самых малых емкостей (0,1 м3) и 7—10 мм для самых больших емкостей (50—100 м3) или при котором угол заострения от износа увеличивается не более чем на одну треть, независимо от емкости ковша.
Поскольку результирующее сопротивление копанию Р0 направлено под некоторым углом к траектории ковша (рис. 31),
Н. Г. Домбровским предложена формула, позволяющая определять нормальную составляющую сопротивления копанию Р02 как функцию касательной составляющей Р01:
где
ψ — коэффициент, зависящий от режима копания (соотношения скоростей копания и подачи), угла копания, а также от износа (затупления) режущей кромки. При обычных для
экскаватора условиях копания сила Р02 направлена со стороны забоя, а значения |
Р02 |
Р01 |
колеблются в широких пределах: ψ = 0,1 ÷ 0,45.
Большие значения принимаются для более тонких стружек, интенсивного заглубления и

59
затупленного рабочего органа. Значения ψ для ковша драглайна в зависимости от угла откоса а0 (наклона траектории) приведены на рис. 32.
Таким образом, расчет составляющих усилия копания грунта ковшом экскаватора практически сводится к определению k1 и ψ.
Зависимость k1 = f (h) по разным исследованиям имеет близкий, но несколько различный характер с неизменным возрастанием k1 в зоне тонких стружек.
Н. Г. Домбровский предлагает для учета влияния толщины стружки менее 20 см определять расчетное сопротивление копанию k1 по формуле с использованием данных табл. 21 по одноковшовым и роторным экскаваторам:
где
А — коэффициент (табл.21).
Для траншейных экскаваторов при толщине стружки меньше 5 см следует пользоваться этой же формулой с подстановкой значения А1 (табл. 21) вместо значения А.
Влияние емкости ковша на сопротивление копанию. При изменении емкости ковша изменяются параметры стружки (b и h) и толщина режущих кромок d. Н. Г. Домбровский
60
считает, что при данной емкости ковша в среднем для стружек нормальной толщины |
||
изменения этих параметров пропорциональны корню кубическому из емкости ковша |
|
q , так |
|
3 |
|
как все они представляют линейные величины, зависящие от емкости.
При увеличении емкости ковша от 0,25 до 15 м3, стружках нормальной толщины (табл. 22) и работе в грунтах средней крепости и крепких грунтах сопротивление копанию падает на 1216%.
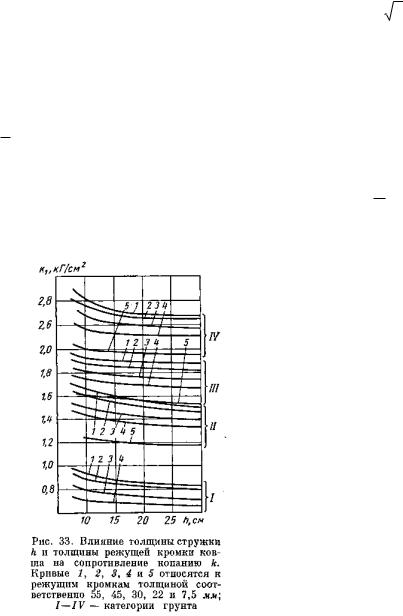
Увеличение толщины режущей кромки d при обычных для одноковшовых и траншейных
экскаваторов отношениях
h |
5 |
|
a |
||
|
ведет к незначительному увеличению сопротивления
копанию. Так, при увеличении d в 7 раз удельное сопротивление копанию k1 возрастает всего на
10—30% в зависимости от грунта (рис. 33). Однако в области тонких стружек
влияние режущей кромки резко возрастает.
h |
|
|
2 3 |
d |
|
Большое влияние на усилие копания оказывает наклон траектории рабочего органа при движении его сверху вниз. В этом случае имеем, например, для суглинка и рыхлой глины следующие соотношения:
Угол наклона траектории в град ............... |
30 |
40 |
55 |
Снижение усилия копания в %.................. |
10 |
30 |
60—70 |
Уменьшение угла копания δ от 50 до 20° и угла заострения режущей кромки или зубьев β от 45 до 15° при заднем угле копания а ≥ 5° в легких грунтах и а ≥ 8° в крепких грунтах влечет за собой уменьшение k1 до 5 % в легких грунтах и до 15 % в крепких. Из соображений износа угол заострения кромки и зубьев β не следует назначать меньше 20—22° для влажных пластичных грунтов и менее 22—25° для тяжелых каменистых. Задний угол а должен быть не менее 3—7°.
Тогда минимальный угол резания δ = β+a= 28 ÷ 30°.
Разработка грунта ковшами с зубьями производится при углах резания δ = 25 ÷ 55°. Острые зубья на прямоугольной режущей кромке уменьшают общее сопротивление
копанию на 6—15%, а сопротивление резанию на 10—25%. Они позволяют увеличить сосредоточенную нагрузку на единицу длины режущей кромки в 2—2,5 раза по сравнению с нагрузкой на прямоугольную кромку и предохраняют от износа стенки ковша.
Установка зубьев на полукруглой режущей кромке, выступающей вперед, увеличивает