

ДОРОЖНЫЕ МАШИНЫ (Часть 1)
.pdf91
использование мощности двигателя при их совместной работе.
Исходные данные, необходимые для решения этой задачи, остаются прежними, т. е. необходимо располагать регуляторной характеристикой двигателя, представленной в функции частоты вращения коленчатого вала (см. рис. 42), и внешней безразмерной характеристикой прозрачного гидродинамического трансформатора (см. рис. 45, а).
Порядок расчета может быть следующий.
1. Регуляторную характеристику необходимо перестроить с учетом отбора мощности на привод вспомогательных механизмов (рис. 54), если в этом есть необходимость.
Находим номинальный свободный крутящий момент двигателя Менсв по его регуляторной характеристике.
3. Определяем активный диаметр гидродинамического трансформатора, пользуясь выражением
где
λнηгтmах — коэффициент крутящего момента вала насосного колеса при максимальном значении к. п. д.
На регуляторную характеристику двигателя наносим кривую коэффициента крутящего момента двигателя, выполняя необходимые расчеты по формуле
Воспользовавшись графиком или приведенной формулой, находим коэффициент крутящего момента двигателя λеmах, соответствующий Mecв max.
4. Проверяем устойчивую работу двигателя при перегрузке гидродинамического трансформатора
При соблюдении этого условия вследствие защитного действия гидродинамического трансформатора двигатель не будет заглохать.
В том случае, когда это условие не соблюдается, необходимо уменьшить активный диаметр гидродинамического трансформатора и провести повторные расчеты в той же

92
последовательности, добиваясь соблюдения устойчивой работы двигателя.
В связи с тем, что двигатель в сочетании с прозрачным гидродинамическим трансформатором работает на переменных режимах, в ряде случаев экономически целесообразно снизить расчетную загрузку двигателя. По мере увеличения степени прозрачности гидродинамического трансформатора точку совместной работы при iгт = 0 нужно смещать в зону большей частоты вращения коленчатого вала двигателя.
Некоторая недогрузка двигателя хотя и приведет к снижению тяговых качеств и ухудшит топливную экономичность его, но при этом будет компенсирована увеличением моторесурса двигателя.
Предположим теперь, что задан двигатель и к нему подобран наиболее подходящий прозрачный гидродинамический трансформатор. Следовательно, известна регуляторная характеристика двигателя, безразмерная характеристика прозрачного гидродинамического трансформатора и его активный диаметр.
Как и в предыдущем случае, необходимо определить передаточное число механического редуктора, обеспечивающее эффективную совместную работу двигателя с гидродинамическим трансформатором.
Порядок расчета будет следующий.
1. Регуляторную характеристику двигателя перестраиваем с учетом отбора мощности на привод вспомогательных механизмов (см. рис. 54).
На регуляторную характеристику двигателя наносим кривую коэффициента крутящего момента двигателя λе, производя необходимые расчеты для этой цели по формуле
где Месв — свободный крутящий момент двигателя.
3.Пользуясь кривой λе графика или рассчитывая по приведенной выше формуле (для чего необходимо принять Месв = Менсв) находим коэффициент крутящего момента двигателя, соответствующий максимальному свободному крутящему моменту двигателя Менсв или его максимальной мощности Месвmах.
4.По безразмерной характеристике прозрачного гидродинамического трансформатора
определяем |
коэффициент |
крутящего момента насосного колеса, |
соответствующий |
||||
максимальному к. п. д. гидродинамического трансформатора ηгтmах. |
|
|
|||||
Определяем |
передаточное |
число |
механического |
редуктора |
ip, |
||
устанавливаемого между двигателем и прозрачным гидродинамическим трансформатором, из отношения
По аналогии с таким же выводом, выполненным при рассмотре ыии расчета основных параметров непрозрачного гидродинамического трансформатора, можно написать
6. Определяем устойчивость работы двигателя при перегрузке прозрачного гидродинамического трансформатора:
Комплексный гидродинамический трансформатор. Расчет основных параметров его
принципиально не отличается от методики расчета прозрачного |
гидродинамического |
трансформатора. |
|

93
Гидродинамическая муфта. При согласовании режимов работы двигателя с гидродинамической муфтой необходимо обеспечить, с одной стороны, устойчивую работу двигателя при перегрузке машины, а с другой — высокие тяговые и скоростные качества. Эти требования наиболее полно будут соблюдаться в том случае, когда между максимальным коэффициентом крутящего момента двигателя λеmах и максимальным коэффициентом крутящего момента насосного колеса λнmах существует зависимость (рис. 55)
В данном случае, как и при расчете основных параметров гидродинамических трансформаторов, необходимо определить либо активный диаметр гидродинамической муфты Dг, либо передаточное число механического редуктора ip.
При первой постановке вопроса необходимо располагать регуляторной характеристикой двигателя в функции частоты вращения коленчатого вала (см. рис. 42) и безразмерной характеристикой гидродинамической муфты (см. рис. 44).
Порядок расчета будет следующий.
1.Регуляторную характеристику двигателя необходимо перестроить с учетом отбора мощности на привод вспомогательных механизмов (рис. 55).
2.Воспользовавшись перестроенной регуляторной характеристикой двигателя, определяем номинальный свободный крутящий момент Менсв и максимальный свободный крутящий момент Месвmax.
3.Определяем расчетный крутящий момент двигателя Мерсв, ориентируясь на
следующие условия:
При таком значении Мерсв двигатель будет защищен от перегрузки, вследствие чего будет исключено его заглохание. Кроме того, машина будет обладать высокими тяговыми качествами.
Следовательно, активный диаметр гидродинамической муфты можно найти из выражения (38), если принять, что Мн = Мерсв и пн = пер, где пер — расчетная частота вращения двигателя, соответствующая принятому Мерсв (устанавливается по регуляторной характеристике двигателя).
Тогда получим

94
где
λнmax — максимальный коэффициент крутящего момента насосного колеса (принимается по безразмерной характеристике гидродинамической муфты).
Если задан двигатель, т. е. известна его регуляторная характеристика и подобрана гидродинамическая муфта (известна ее безразмерная характеристика и активный диаметр), то для определения передаточного числа механического редуктора можно применить следующую методику расчета:
1. Регуляторную характеристику двигателя перестраиваем с учетом отбора мощности двигателя на привод вспомогательных механизмов машины (рис. 55).
На регуляторную характеристику двигателя наносим кривую коэффициента крутящего момента двигателя λе производя требуемые расчеты по формуле
где
Месв — свободный крутящий момент двигателя, принимаемый по регуляторной характеристике;
пе — частота вращения коленчатого вала двигателя, соответствующая принятому значению Месв (берется также по регуляторной характеристике двигателя).
3. Определяем передаточное число механического редуктора, устанавливаемого между двигателем и гидродинамической муфтой. По аналогии с гидродинамическим трансформатором
где
λнmах — максимальный коэффициент крутящего момента насосного колеса, принимаемый по безразмерной характеристике гидродинамической муфты;
λерсв — расчетный коэффициент крутящего момента двигателя, соответствующий Мерсв (принимается по регуляторной характеристике двигателя).
После того как определим Dг или ip, остается построить характеристику совместной работы двигателя с гидродинамической муфтой, применяя методики, изложенные в § 26.
§ 28. ОПРЕДЕЛЕНИЕ ДВИЖУЩЕЙ СИЛЫ МАШИНЫ С МЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ
При установившемся движении машины крутящий момент колесного движителя Мк связан с крутящим моментом двигателя Ме уравнением
где
iм — общее передаточное число трансмиссии привода колесного движителя; ηм — механический к. п. д. этой же трансмиссии.
В общем случае

95
где
iм — передаточное число коробки передач;
iə — передаточное число демультипликатора; ipк — передаточное число раздаточной коробки; iг — передаточное число главной передачи;
iб — передаточное число бортовой передачи; iкp — передаточное число колесного редуктора;
пе, ωе — частота вращения и угловая скорость коленчатого вала двигателя; пк, ωк — частота вращения и угловая скорость колесного движителя.
В свою очередь,
где
ημ — к. п. д. одной цилиндрической пары (т)ц = 0,985); ηк — к. п. д. одной конической пары
ημ, ηк — соответственно число цилиндрических и конических пар, последовательно включенных в трансмиссию привода колесного движителя на данной передаче.
В результате взаимодействия колесного движителя с грунтом, обусловливаемого подводимым от двигателя крутящим моментом Мк, последний преобразуется в окружную силу Рк, а вращательное движение колесного движителя — в поступательное движение машины.
Окружную силу колесного движителя Рк можно определить по крутящему моменту двигателя:
или по его мощности
где
rс — силовой радиус колесного движителя в м; Ne — мощность двигателя в л. с.
В этих уравнениях Ме подставляется вкГ·м, а nе — в об/мин.
При неустановившемся движении машины для земляных работ крутящий момент колесного движителя, а следовательно, и окружная сила будут другими. Так, при ускоренном движении часть энергии двигателя затрачивается на ускорение вращения маховика и связанных с ним деталей трансмиссии. Поэтому крутящий момент, передаваемый от двигателя к трансмиссии, уменьшается на
где
Je — момент инерции вращающихся деталей двигателя трансмиссии, приведенных к коленчатому валу;

96
|
d e |
— угловое ускорение маховика (при замедленном движении оно берется со |
|
dt |
|
|
|
|
знаком минус). |
||
Следовательно, при неустановившемся движении момент, подводимый к колесному движителю, будет
Часть энергии, передаваемой колесному движителю, затрачивается на ускорение вращения колес. В связи с этим окружная сила составит
где
ΣJк — суммарный момент инерции всех колес;
d |
к |
— угловое ускорение колесного движителя. |
|
||
dt |
|
|
|
|
Максимальная величина окружной силы колесного движителя ограничивается условиями сцепления пневматических шин с грунтом:
где
φ — коэффициент сцепления шин колесного движителя с поверхностью качения; R — нормальная реакция поверхности качения на колесный движитель;
ΣR — нормальная реакция на все колеса.
Теоретическая скорость движения машины (без учета потерь скорости за счет буксования колесного движителя) может быть подсчитана по уравнению
Здесь значения rс в м, а пе в об/мин.
Действительная скорость движения землеройной машины определяется по уравнениям
или
где
А, В, п — коэффициенты, принимаемые по табл. 25;
R — нормальная реакция грунта на колесный движитель; Т — сила тяги.
Размерности величин rс и пе те же, что и в уравнении (61).
Расчетная скорость движения машины может быть определена по формуле (61), если вместо пе подставить номинальную частоту вращения коленчатого вала двигателя пен.
Номинальную скорость движения машины vн принято определять при коэффициенте буксования δ = 20% и частоте вращения коленчатого вала двигателя, соответствующей этому режиму работы. Скорость vн можно рассчитать по формуле (62).
97
Для применения уравнения (63) необходимо знать функциональную зависимость Ме = Ме (пе), пользуясь которой с помощью уравнения (57) можно определить Рк, соответствующее заданному значению пе, а следовательно, и Т = Рк — Pf, где Pf — сила сопротивления качению колес машины для земляных работ. Эта зависимость устанавливается по регуляторной характеристике двигателя (см. рис. 42).
Определение движущей силы и действительной скорости движения машин для земляных работ с гидромеханической трансмиссией может производиться с использованием изложенных выше методов с той лишь разницей, что в качестве исходного фактора должна приниматься не регуляторная характеристика двигателя, а выходная характеристика системы двигатель — гидродинамическая передача. Следовательно, при выполнении указанных расчетов зависимость между Мт и пт должна приниматься по кривой Мт = Мт (пт) выходной характеристики системы.
§ 29. ОБЪЕМНЫЕ ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ
Объемными гидравлическими приводами являются гидросистемы, предназначенные для приведения в движение исполнительного механизма машины с преобразованием, как правило, скорости и изменением сил или моментов.
Гидравлический привод (гидропривод) состоит из объемного насоса, который преобразует механическую энергию двигателя в энергию потока рабочей жидкости, гидродвигателя в виде силового цилиндра или роторного двигателя, который преобразует энергию потока жидкости в механическую энергию исполнительного органа машины, и устройств и механизмов, обеспечивающих управление и регулирование гидроприводом.
Объемные гидроприводы получили широкое применение в различных землеройных машинах: у одноковшовых универсальных экскаваторов для изменения положения стрелы, рукояти, ковша, для поворота рабочего оборудования и выдвижения выносных опор; у машин для земляных работ для изменения положения рабочего органа машины, в рулевых механизмах, у самоходных машин и тягачей для привода ходового оборудования; кроме того, объемный гидропривод используется для управления вспомогательными механизмами (муфтами, тормозами, передачами и т. п.).
Объемные гидроприводы машин для земляных работ классифицируются:
а) по конструктивному признаку — открытые, в которых сливная магистраль соединена с окружающим воздухом, и закрытые, имеющие небольшой подпор жидкости на сливе (2—3 am), создаваемый дополнительным насосом;
б) по виду энергопреобразователя — шестеренные, поршневые, пластинчатые; в) по свойству регулируемости параметров — регулируемые и нерегулируемые;
г) по характеру движения выходного звена — с возвратно-поступательным движением (силовые цилиндры), с вращательным движением (гидромоторы) и с возвратно-поворотным движением;
д) по назначению привода — для рабочего органа машины, для ходового оборудования, для систем управления вспомогательными механизмами (муфтами, тормозами, передачами и т. п.);
е) по режиму действия — цикличные и непрерывные; ж) по системе управления — с ручной, электрической, гидравлической и с
электрогидравлической системой управления.
Наибольшее распространение на машинах для земляных работ получили гидроприводы в системах изменения положения рабочих органов. На этих машинах и одноковшовых экскаваторах применяют в основном открытые, нерегулируемые гидроприводы возвратнопоступательного действия, работающие циклично, с ручным или электрогидравлическим управлением. Примеры подобных схем представлены на рис. 56.

98
Гидроприводы вращательного действия начинают применять для ходовых механизмов самоходных машин, для приводов лебедок экскаваторов и других механизмов с вращательным движением выходного звена.
Широкое применение объемных гидропередач в этих машинах обусловлено их преимуществами, основными из которых являются:
а) простота осуществления больших передаточных чисел, трансформации вращательного движения в поступательное, регулирования параметров, реверсивности действия, разветвления мощности к источникам потребления, предохранения от перегрузки;
б) независимость расположения узлов и связанная с этим компактность передач; в) малая металлоемкость при оптимальных параметрах (вес насосов и моторов
составляет от 10 до 20% веса электроагрегатов подобного назначения и мощности) и в связи с этим малая инерционность и относительно высокое быстродействие;
г) легкость стандартизации и унификации |
узлов и деталей, а следовательно, |
возможность увеличения серийности изготовления. |
|
Имеются и другие сопутствующие достоинства: самосмазываемость, простота предохранительных устройств, надежность и устойчивость работы и др.
Гидропередачи не лишены недостатков. К основным из них следует отнести: а) некоторое влияние температуры внешней среды на параметры привода;
б) потери мощности из-за внутренних и внешних утечек жидкости и на преодоление трения жидкости в трубопроводах;
в) возможность аэрации жидкости и уменьшение жесткости системы.
Перечисленные недостатки могут быть частично уменьшены применением специальных рабочих жидкостей, повышением качества гидропередач и ухода за ними.
Всоответствии с температурой внешней среды в качестве рабочей жидкости в гидропередачах машин для земляных работ применяют минеральные масла различных марок с вязкостью от 1,8 до 3,3° Е.
Внастоящее время отечественной промышленностью освоена новая всесезонная рабочая жидкость ВМГЗ, рекомендуемая для применения в условиях низких температур, и рабочая
99
жидкость МГ-30, которая может заменить большую номенклатуру специальных масел, имеет пониженную вязкость, обладает антиокислительными и противопенными свойствами. Эти жидкости рекомендуется применять в диапазоне температур от —35 до +50° С.
Вгидроприводах машин для земляных работ широко применяют шестеренные насосы типа НШ с автоматической компенсацией торцового зазора между шестернями и корпусом, поршневые типа НПА — аксиально-плунжерные, реже используют пластинчатые типа ЛНМ и радиально-поршневые. Все типы насосов, как правило, могут быть использованы в качестве гидромоторов.
Шестеренные насосы применяют в нерегулируемых приводах с передачей относительно небольшой мощности (не более 20 л.с), с максимально развиваемым давлением до 100—130 кГ/см2. Аксиально-поршневые насосы и гидромоторы распространены в приводах с повышенным давлением 200—400 кГ/см2 для передачи относительно больших мощностей (от 30 л.с. и выше).
Радиально-поршневые насосы применяют в гидроприводах вращательного действия с передачей большой мощности. Наиболее перспективны регулируемые насосы и гидромоторы.
Впоследнее время специально для гидроприводов строительных и дорожных машин отечественной промышленностью освоены аксиально-плунжерные насосы и гидромоторы с бескарданным ведением поршней и самоцентрирующимся блоком, с постоянной удельной производительностью q, равной 11,6; 23,1; 54,8; 107 и 225 см3/об и регулируемые насосы и гидромоторы на 54,8; 107 и 225 см3/об. Эти насосы и гидромоторы имеют высокий к. п. д. —
ηоб = 0,96 -*- 0,94; ηм = 0,92 - 0,93.
Перспективным развитием гидроприводов машин для земляных работ предусматривается их широкое применение.
Для выполнения поступательного движения применяют силовые цилиндры одностороннего и двустороннего действия. В машинах для земляных работ получили наибольшее распространение цилиндры двустороннего действия. Телескопические цилиндры, являющиеся разновидностью цилиндров одностороннего действия, применяют редко, только при необходимости выполнения значительных ходов.
Гидроприводы вращательного действия применяют в машинах для земляных работ в основном для привода ходового оборудования, частично для привода поворотных механизмов экскаваторов, для привода элеватора скрепера и др.
Основными параметрами объемного гидропривода являются: рабочее давление жидкости р в кГ/см2; расход жидкости Q в л/мин или в м3/ч мощность, передаваемая энергоносителем (насосом), в л. с. или квт] к. п. д. привода.
Параметрами выходного звена являются: для гидропривода вращательного действия — крутящий момент Мм в кГ·м и частота вращения вала гидромотора пм, а для гидропривода поступательного действия — сила Sш в кГ на штоке гидроцилиндра и скорость его передвижения vп в
м/сек.
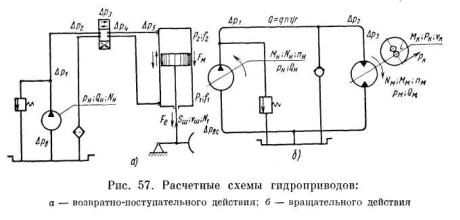
Расчет гидропривода состоит из обоснования выбора и определения его основных параметров, обеспечивающих заданные выходные параметры на исполнительном звене гидропередачи. Расчетные схемы гидроприводов поступательного и вращательного действия представлены на рис. 57.

100
Рабочее давление в объемных гидропередачах машин для земляных работ колеблется в широких пределах — от 70 до 240 кГ/см2; имеется общая тенденция в повышении этих величин до 320— 450 кГ/см2. С увеличением давления металлоемкость и стоимость гидросистем снижаются. Так, например, в гидропередачах мощностью 35 л. с. при переходе с давления 70 кГ/см2 на 420 кГ/см2 стоимость снижается в 1,7 раза, а металлоемкость при этих же параметрах уменьшается почти в 2 раза.
Выбор давления обусловливается многими факторами — назначением гидропривода, технологическими возможностями изготовления гидроаппаратуры, эксплуатационной целесообразностью и надежностью, иногда и наличием серийно изготовляемых энергопреобразователей. Обоснование выбора рабочего давления для гидропередачи является очень ответственным вопросом и требует от проектировщика комплексного рассмотрения всего многообразия технических, экономических и эксплуатационных требований, предъявляемых к машинам. Трудность выбора давления объясняется еще и тем, что обычно этот параметр гидропривода выбирается не на основании конструктивных расчетов, как это делается для других основных параметров (мощность и расход), а путем многостороннего технико-экономического и логического обоснования. Наглядное представление влияния давления на металлоемкость и стоимость изготовления цилиндров дает график (рис. 58).
Расход |
в гидропередаче |
обусловливается |
производительностью насоса, |
которая |
|
определяется |
его геометрическими |
параметрами и частотой вращения. |
|
||
Расход |
рабочей жидкости |
в |
гидропередачах |
зависит от передаваемой мощности и |
|
назначенного давления, так как эти величины связаны гиперболической зависимостью
где С2 — переводной коэффициент размерностей.
Для выражения N в кет при Q — л/мин и р — кГ/см2 С2 = |
1 |
; |
|||
|
|||||
612 |
|||||
|
|
|
|
||
для выражения N в л.с. С2 = |
1 |
. |
|
|
|
450 |
|
|
|||
|
|
|
|
||
При одной и той же мощности чем больше будет задано давление, тем меньший расход, а следовательно, и скорость движения выходного звена может обеспечить гидропередача.
В современных машинах для земляных работ мощность, передаваемая объемными гидропередачами, достигает 100—250 квт (экскаваторы, привод активных рабочих органов, ходовые механизмы тягачей и т. п.). Мощность гидропередач для изменения положения рабочих органов у этих машин составляет 20—50% мощности основного двигателя машины и в отдельных моделях доходит до 120—170 квт.