

Silmetod5b
.pdf51
2.4. В правом углу над таблицей результатов указывается относительная величина расхождения по уравновешивающему моменту между первым и вторым листом проекта.
Вариант 3.
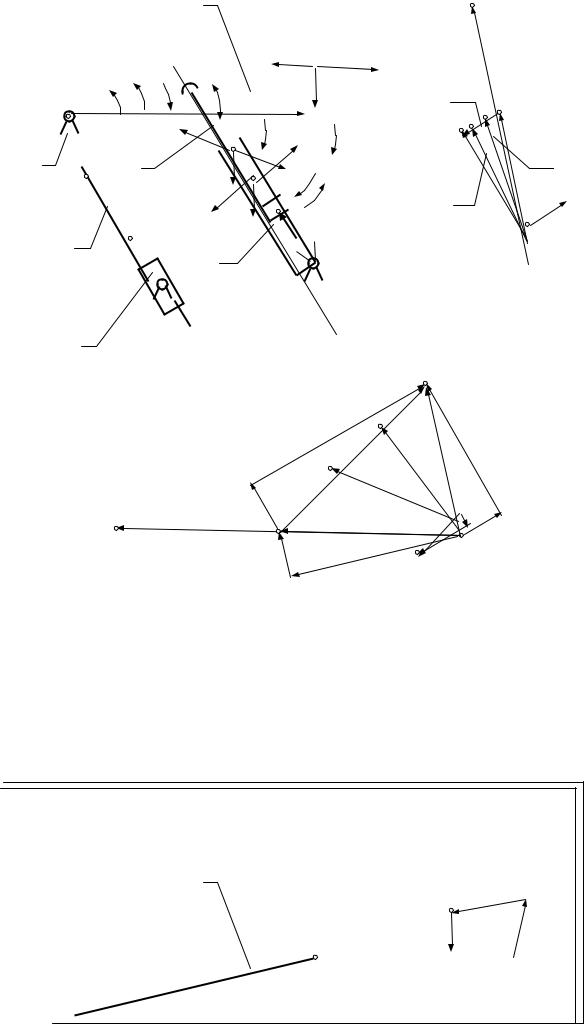
3.1.Как и в первом варианте на листе записывается постановка задачи, вычерчивается в масштабе кинематическая схема механизма в произвольном положении, здесь же тонкими линиями показываются начальное и конечное положения механизма (для механизма с циклом движения 2π или 4π вычерчиваются “мертвые” положения).
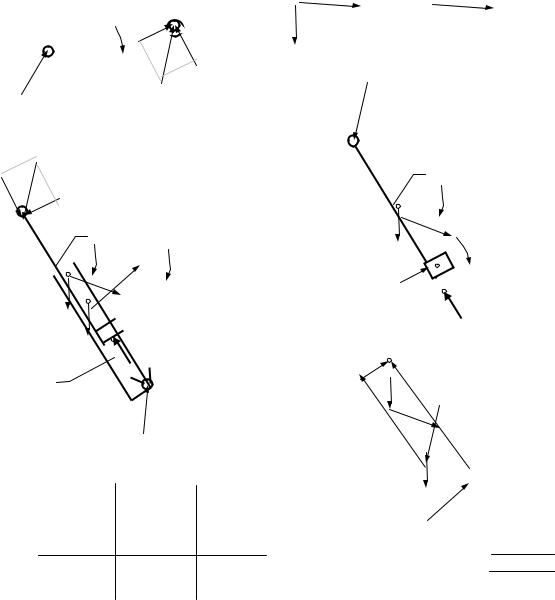
3.2.Затем, в последовательности решения задачи силового расчета, изображаются в принятом для схемы механизма масштабе рассматриваемые группы звеньев или звенья. Рядом с группой записываются уравнения кинетостатики - уравнения сил и уравнения моментов в проекциях на оси системы координат. Если эти уравнения записываются в локальной системе координат, связанной с одним из рассматриваемых звеньев группы, то изображается эта система координат.
3.3.Реакции во вращательных кинематических парах изобража-
ются в виде полярных диаграмм Fij = f (ϕij), где ϕij – угол образуемый вектором силы с положительным направлением оси абсцисс. Реакции в поступательных КП изображаются двумя диаграммами в прямоугольных координатах : Fij = f (ϕ 1), Мij = f (ϕ 1) (или h Fij = f (ϕ 1), где h Fij – плечо момента силы Fij относительно центра КП).
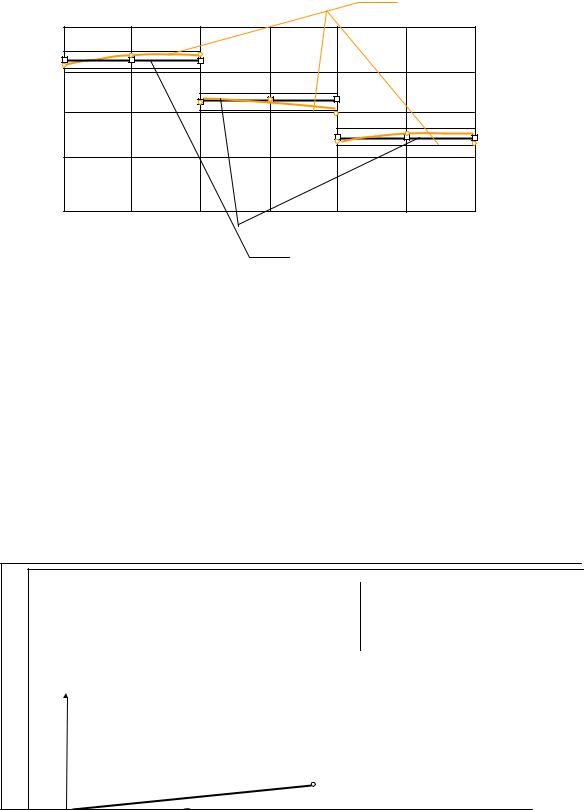
3.4. В правом нижнем углу изображается диаграмма уравновешивающего движущего момента (силы) на входном звене или момента (силы) сопротивления выходном звене. На этой диаграмме изображаются две зависимости: одна для величин, определенных при выполнении первого листа, вторая – при выполнении второго. Относительно кривой для
52
момента с первого листа строится область 5% -го доверительного интервала. Если кривая момента, определенного на втором листе располагается в области доверительного интервала, то результаты силового расчета считаются адекватными результатам энергетического расчета, проводимого при выполнении первого листа.( пример оформления диаграммы на рис. 45).
Mд1(2)
200
Н м
100
0 |
π/6 |
π/3 |
рад |
π/2 |
|
Mд1(1)
Рис.46
|
|
__ __ |
__ |
|
|
|
|
||
Дано: кинематическая схема механизма, |
vC2= vB + vC2B |
|||
ϕ1, ω1, ε1, mi, ISi |
___ == __ |
------ __ |
||
Определить: Fд2, Fij, Mij |
|
vC2= vC0 + vC2C0 |
||
|
|
==== |
--------- |
|
|
|
|
||
Схема механизма в расчетном положении |
План скоростей |
|||
|
|
|
µv, мм/м с-1 |
|
y µl, мм/м |
1 |
|
s1 |
|
53
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vS1 |
|
|
ω1 |
ε1 Mи1 |
|
B |
aS1 |
S1 |
|
Fи1 |
|
|
|
||||
|
|
|
|
G1 |
|
vCB |
|
|||||||||
A |
|
|
|
|
|
|
ϕ1 |
|
s2 b |
|||||||
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
d |
vB |
|
|
|
|
aS2 |
|
|
Mи2 |
Fи3 |
Mи3 |
|
c2 |
|
||||
0 |
|
|
|
2 |
|
|
S2 |
|
|
|
vC2 |
= vC 2C0 |
vS2 |
|||
|
|
|
|
|
|
|
G2 |
S3 Fи2 ω2 = ω3 |
|
|
|
|||||
|
S2 |
|
|
|
|
|
aS3 |
G3 |
|
ε2 = ε3 |
|
vD |
vS3 s3 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
D |
Fд2= -Fд3 |
|
|
pv ,a,c0 |
|||||
2 |
|
|
D |
|
|
|
3 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
План ускорений |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
µa, мм/м с-2 |
|||||
_ |
_ |
|
_ |
|
|
|
|
|
|
|
|
|
c′2 |
|
||
|
|
|
|
|
|
|
|
atCB |
atC2C0 |
|
||||||
|
aB = anB + atB |
|
|
|
|
|
|
|
|
|||||||
__ === __ ===__ |
|
|
__ |
|
|
|
|
|
|
|
|
|
||||
|
aC2 |
= aB + anCB |
+ atCB |
|
|
|
d′ aCB |
|
|
|
||||||
|
|
=== |
===== |
-------- |
|
|
|
|
|
aC2 = aC2C0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
__ |
__ |
__ |
|
|
__ |
|
|
|
|
|
|
|
|
|
||
|
aC2 = aC0 + akC2C0 |
+ atC2C0 |
n′CB |
s′2 |
aS2 |
|
|
n′C2 |
||||||||
|
|
=== |
======= |
---------- |
anCB |
|
|
|
|
|
|
|||||
|
|
|
|
aS1 |
|
|
|
|
aB |
|
|
|
|
|
akC2C0 |
|
|
s′1 |
|
|
|
|
|
b′ atB |
|
|
|
|
pa,a′,c′0 |
||||
|
|
|
|
|
|
|
|
|
|
|
aS3 |
n′S3 |
||||
_ |
_ |
_ |
|
|
|
|
n′B |
|
anB |
s′3 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
aS3 = anS3 + atS3 |
|
|
|
|
Рис. 46 |
|
|
|
|||||||
|
|
=== |
=== |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2. ∑ MA(1)=0 |
Fn12 |
|
|
|
_ _ |
_ |
_ |
|
3. |
∑ F(1)=0 G1 + Ф1+ F12 |
+ F10 = 0 |
µF, мм/H |
|
|
|
|
?? |
|
Звено 1 |
1 |
|
|
F10 |
|
|
|
|
|
|
|
|
|
pF |
|
|
|
|
F12 |
|
|
|
|
|
|
|
|
|
|
54 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
MФ1 |
|
B |
|
|
|
S1 |
Ф1 |
G1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
G1 |
|
|
|
|
|
Ф1 |
|||||||||||
|
A |
|
|
Ft12 |
Fn12 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
F10 |
|
|
|
F12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Звено 2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
_ |
|
|
_ |
_ |
_ |
_ |
_ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
∑ F(2)=0 |
G2 + Ф2 + F21 + F23 |
+ Fд2= 0 |
|
F21 |
|
|
|
|
|
|
|
|
|
|
||||||||||
6. ∑ MB(2)=0 M23 |
|
? |
? |
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
F21 |
Группа звеньев 2-3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Fn21 |
|
|
|
|
|
|
|
|
|
MФ2 |
|||||||||||||||
Ft21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
B |
2 |
|
|
|
|
|
|
|
|
|
|
G2 |
|
|
Ф2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
S2 |
|
MФ2 Ф3 |
MФ3 |
|
|
|
|
|
|
|
|
|
|
M23 |
||||||||||
|
S3 |
Ф2 |
1. ∑ MC(2-3)=0 Ft12 |
|
|
F23 |
D Fд2 |
||||||||||||||||||
|
G2 |
|
|
||||||||||||||||||||||
|
|
G3 |
|
|
|
|
|
|
|
|
|
|
|
|
µF, мм/H |
||||||||||
|
|
|
D |
Fд2 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
F23 |
pFF30 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
С |
|
|
|
|
|
|
G2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
F30 |
|
|
|
|
|
|
Fд2 |
Ф2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F21 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
_ |
|
|
_ |
_ |
_ |
_ |
_ _ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
4. ∑ F(2-3)=0 G2 + Ф2 |
+ F21 + G3 |
+ Ф3+ F30 = 0 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Результаты силового расчета |
?? |
|
|
|
G3 |
Ф3 |
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
F10,H |
|
F12,H |
F30,H |
|
|
Относительная погрешность |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆Fд2 = … |
|||||||||||
|
|
ϕ10° |
|
ϕ12° |
|
ϕ30° |
|
|
|
|
|
|
|
||||||||||||
|
|
F23,H |
M23,H м |
Fд2,H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЛИТЕРАТУРА
1. Теория механизмов и механика машин: Учебн. для втузов/ К.В.Фролов, С.А.Попов, А.К.Мусатов и др.; Под ред. К.В.Фролова. – 2- у изд., перераб. и доп. – М.: Высш. шк., 1998. – 496 с.: ил.
55
2.Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и механике машин: Учебное пособие. – М.: Высш. шк.,
1998. – 294 с.: ил.
3.Лукичев Д.М., Тимофеев Г.А. Определение усилий в кинематических парах рычажных механизмов с применением ЕС ЭВМ. – М.: Изд-во МВТУ. 1983. – 41с.: ил.
4.Силовой расчет механизмов: Учебное пособие /Д.М.Лукичев, Г.А.Тимофеев, И.Н.Ермакова, А.В.Яминский; Под ред. К.В.Фролова. – М.: Изд-во МГТУ, 1991. – 78 с., ил.
5.Теория механизмов и механика машин. Учебное пособие для выполнения домашних заданий по первой части дисциплины “Основы проектирования машин” / Под ред. В.А.Никонорова. – М.: Изд-во МГТУ, 1989. – 81 с.: ил.
6.Зиновьев Вяч. А. Курс теории механизмов и машин. Учебное пособие. – М.: Гос. изд-во физ.-мат. лит-ры, 1960. – 431 с.: ил.
ВВЕДЕНИЕ.
1.Аксиома освобождения от связей.
2.Классификация сил, действующих в механизмах.
56
3.Силы в кинематических парах плоских механизмов(без учета трения).
4.Силовой расчет механизмов.
5.Механические характеристики машин.
6.Этапы силового расчета механизмов.
7.Силовой расчет рычажных механизмов по группам Ассура.
8.Кинетостатический силовой расчет типовых механизмов.
8.1.Кинетостатический расчет зубчатой передачи (метод планов сил).
8.2.Кинетостатический расчет кулачкового механизма (метод планов сил).
8.3.Кинетостатический расчет четырехшарнирного механизма (метод проекций или аналитический).
9.Силовой расчет сложных зубчатых механизмов.
9.1.Силовой расчет двухступенчатого цилиндрического редуктора.
9.2.Силовой расчет однорядного планетарного редукто-
ра.
10.Применение компьютеров при решении задач силового расчета механизмов.
10.1. Силовой расчет по программе PR 1. 10.2. Силовой расчет по программе PR 3050. 10.3. Силовой расчет по программе PR 3207.
10.4. Силовой расчет механизмов в системе САРЦМ.
10.5.Силовой расчет механизмов в системе DIADA.
11.Методические указания к выполнению второго листа курсового проекта “Кинетостатический расчет механизма”.
57
Приложение 1. Пример графоаналитического кинетостатического силового расчета шестизвенного кулисного механизма. Приложение 2. Пример аналитического кинетостатического силового расчета шестизвенного кулисного механизма.
Приложение 3. Пример аналитического кинетостатического силового расчета рычажного механизма в среде MathCAD.