

Silmetod5b
.pdf11
режимо малы, или в случаях, когда неизвестны массы и моменты инерции звеньев механизма (на этапах, предшествующих эскизному проектированию); Уравнения статического равновесия:
f |
m |
∑ Fi = 0; |
∑ Mi = 0; |
i=1 |
i=1 |
где Fi - внешние силы, приложенные к механизму или его звеьям, Mi- внешние моменты сил, приложенные к механизму или его
звеньям.
• кинетостатический - для движущихся механизмов при известных массах и моментах инерции звеньев, когда пренебрежение инерционными силами приводит к существенным погрешностям; Уравнения кинетостатического равновесия:
f |
n |
m |
k |
∑ Fi + ∑ Фi = 0; |
∑ Mi + ∑ MФi = 0; |
||
i=1 |
i=1 |
i=1 |
i=1 |
где Фi - инерционные силы, приложенные к звеньям, MФi- моменты сил инерции, приложенные к звеньям.
• кинетостатический с учетом трения - может быть проведен когда определены характеристики трения в КП и размеры элементов пар.
Определение числа неизвестных при силовом расчете. Для определения числа неизвестных, а, следовательно, и числа независимых уравнений, при силовом расчете необходимо провести структурный анализ механизма и определить число и классы кинематических пар, число основных подвижностей механизма, число избыточных связей. Чтобы силовой расчет можно было провести, используя только уравнения кинетостатики, необходимо устранить в нем избыточные связи. В противном случае, к системе уравнений кинетостатики необходимо до-
12
бавить уравнения деформации звеньев, необходимые для раскрытия статической неопределимости механизма. Так как каждая связь в КП механизма соответствует одной компоненте реакции, то число неизвестных компонент реакций равно суммарному числу связей накладываемых КП механизма. Уравновешивающая сила или момент должны действовать по каждой основной подвижности механизма. Поэтому суммарное число неизвестных в силовом расчете определяется суммой связей в КП механизма и его основных подвижностей
H-1
ns = W0 + ∑ (H-i) pi ,
i=1
где ns - число неизвестных в силовом расчете, Н - число степеней свободы твердого тела (на плоскости Н=3, в пространстве Н=6), i – число подвижностей в кинематической паре, pi – число пар с i подвижностями.
5. Механические характеристики машин.
На этапе подготовки исходных данных необходимо определить внешние силы действующие на входные и выходные звенья машины. В машинах-двигателях, которые преобразуют любой вид энергии в механическую, закон изменения движущей силы определяется используемыми для этого преобразования физическими законами. Для электродвигателей – это законы электромагнитной индукции, для тепловых двигателей – законы термодинамики и т.д. На выходных звеньях рабочих машин силы сопротивления определяются законами взаимодействия рабочего органа с обрабатываемой деталью или с окружающей средой. В металлообрабатывающих станках это силы резания, в кузнечнопрессовых машинах – силы деформации заготовки, в транспортерах и конвейерах - силы трения и т.д. Законы изменения этих сил определяются экспериментально. Обобщение экспериментальных исследований
13
используются в динамических расчетах машин в виде механических характеристик.
Механической характеристикой машины называется зависимость силы или момента на выходном валу или рабочем органе машины от скорости или перемещения точки или звена ее приложения.
То есть внешние силы действующие на механизмы зависят от скорости (а следовательно и от времени) или от положения. В студенческом курсе ТММ рассматриваются в основном силы зависящие от положения или позиционные.
Рассмотрим примеры механических характеристик различных машин.
1.Двигатели внутреннего сгорания (ДВС):
•четырехтактный ДВС
|
р,МПа |
|
||
|
|
|
|
ab - расширение |
|
|
|
|
|
|
|
|
pmax |
(рабочий ход); |
a |
|
|
bc - выхлоп; |
|
|
|
|
|
cd - всасывание; |
|
|
|
|
da – сжатие. |
c |
b |
|
|
|
|
0 |
d |
SC , м |
|
HC |
|
|
Ри с. 5 |
|
Индикаторная диаграмма - графическое изображение зависимости давления в цилиндре поршневой машины от хода поршня.
14
• двухтактный ДВС
|
|
|
|
р,МПа |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
ab - расширение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(рабочий ход); |
a |
|
|
|
|
|
|
|
|
|
pmax |
bc - продувка; |
|
|
|
|
|
b |
|
|
|
ca - сжатие. |
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
HC |
|
c SC , м |
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Рис. 6 |
|
|||||
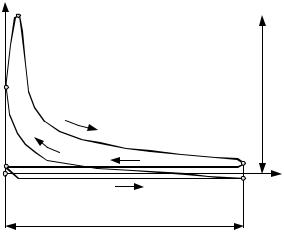
2.Электродвигатели
•асинхронный электродвигатель переменного тока
На диаграмме: Мдп - пусковой момент; Мдн - номинальный крутящий момент;
Мдк или Мдmax - критический или максимальный момент; ωдн - номинальная круговая частота вращения вала двигателя;
ωдхх или ωдс - частота вращения вала двигателя холостого хода или синхронная.
Уравнение статической характеристики асинхронного электродвигателя на линеаризованном участке устойчивой части [2] имеет вид
Мд = b1 + k1 ωд ,
где Мд - движущий момент на валу двигателя, ωд - круговая частота вала двигателя ,
b1 = Мдн ωд /(ωдс - ωдн ) , k1 = - Мдн / (ωдс - ωдн ).
15
Статическая характеристика асинхронного двигателя, выражающая зависимость нагрузки от скольжения, определяется формулой Клосса
Мд = 2 Мдк (S/Sк + Sк/S ),
где S = 1 - ωд /ωдс , Sк = 1 - ωдк /ωдс , ωд >=ωдс .
Мд ,Н м |
b |
|
|
ab - неустойчивый |
a |
|
|
||
|
|
|
участок характеристики; |
|
|
|
с |
|
bd -устойчивый |
Мдн |
|
Мдmax |
участок характеристики. |
|
Мдп |
|
|
|
|
0 |
|
|
d |
ωд , рад/с |
ωдк |
ωдн |
ωдс |
||
Рис. 7
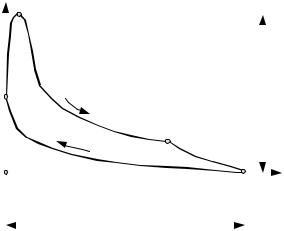
• двигатель постоянного тока с независимым возбуждением
Мд ,Н м
|
a |
|
Мдп Мдн |
|
внешняя характеристика |
|
|
c |
0 |
ωдн |
ωдхх ωд , рад/с |
Рис. 8
Уравнение статической характеристики для двигателя постоянного тока с независимым возбуждением
Мд = Mдн + k (ωдн - ωд ) ,
|
|
|
|
16 |
|
где |
k = Мдн /(ωдхх - ωдн ). |
|
|
||
|
3. |
Рабочие машины |
|
|
|
|
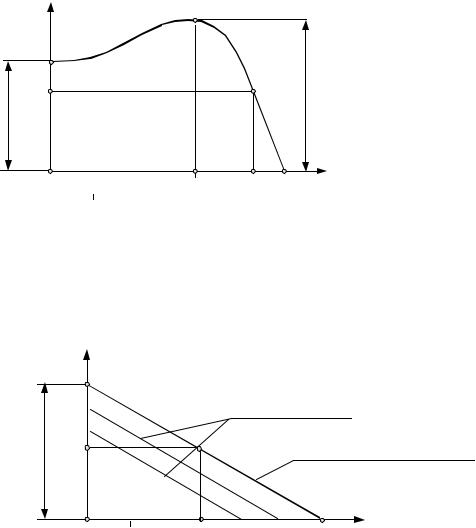
• |
поршневой насос |
|
|
|
|
|
|
р,МПа |
|
|
|
|
a |
|
b |
cd - всасывание ; |
|
|
|
ab - нагнетание. |
||
|
|
|
|
|
|
|
|
|
pmax |
линияатмосферного давления |
|
|
|
0 |
pmin |
|
|
|
|
|
|
|
|
|
|
d |
HC |
c |
SC , м |
|
|
|
|
|
|
|
|
|
Рис. 9 |
|
|
|
|
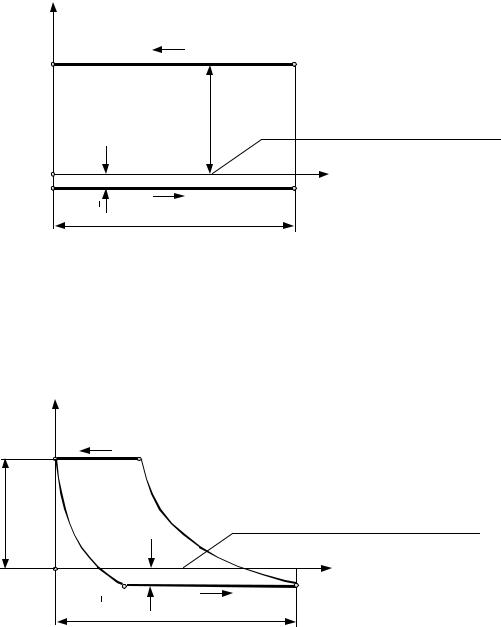
• |
поршневой компрессор |
|
|
|
|
|
р,МПа |
dc – всасывание; |
|
|
|
|
|
cb - сжатие; |
|
|
|
|
|
ba - нагнетание; |
|
|
|
a |
b |
ad - расширение остаточного воздуха. |
|
|
pmax |
|
линия атмосферного давления |
||
|
|
|
|
||
pmin
0 |
d |
c |
SC , м |
|
|
HC |
|
|
|
Рис. 10 |
|
Линии cb и ad - линии сжатия и расширения газа (воздуха) опре- |
|||
деляются параметрами газа (объемом, давлением и температурой) и в
17
общем виде описываются уравнением политропы |
p Vn = const , где n |
||||||||||||||||
- показатель политропы. |
|
|
|
|
|
|
|
||||||||||
• |
строгальный станок |
|
|
|
|
|
|
|
|||||||||
0 |
|
|
Fc,Н м |
|
|
|
Fсmin |
ab,ef - перебег; |
|||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SC , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
a |
|
|
|
b |
|
|
e |
|
|
f |
cd - резание; |
|||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
Fcmax |
|
|
|
|
|
|
|
fa - холостой ход. |
||
|
|
lп |
c |
|
|
|
|
|
|
|
d |
|
lп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
lр |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
HC |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Рис. 11 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
6. Этапы силового расчета механизмов. |
||||||||||||||
В силовом расчете механизма можно выделить следующие эта- |
|||||||||||||||||
пы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
♦структурный анализ механизма: определение числа звеньев, вида и класса КП, числа связей в КП механизма, числа основных и местных подвижностей, определение и устранение избыточных связей;
♦определение всех внешних сил и моментов, включая силы веса, главные векторы и главные моменты сил инерции;
♦декомпозиция механизма на звенья, группы или типовые механизмы, при этом число рассматриваемых подсистем или элементов должно быть равно числу неизвестных деленному на число уравнений статики для каждого рассматриваемого в силовом расчете элемента (для плоских механизмов – 3, для пространственных – 6);
18
♦составление уравнений статики или кинетостатики для всех рассматриваемых элементов системы;
♦решение полученной системы уравнений и определение неизвестных реакций (во вращательной КП по величине и направлению, в поступательной – определяется величина реакции и реактивный момент).
7. Силовой расчет рычажных механизмов по группам Ассура
Часто в качестве элементов системы при силовом расчете применяются структурные группы Ассура. Эти группы по определению являются статически определимыми. Поэтому система уравнений силового расчета распадается на подсистемы меньшего порядка по числу групп Ассура. При изучении курса ТММ в разделе силового расчета рассматриваются в основном простые рычажные механизмы, состоящие из простейших двухповодковых групп. Разновидностей двухповодковых групп всего пять. Рассмотрим алгоритмы решения задачи силового расчета для двухповодковых групп:
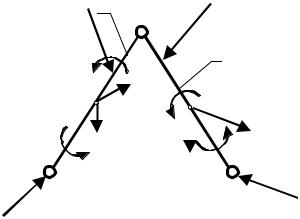
1. группа первого вида с тремя вращательными парами - ВВВ
(рис. 12).
i
С |
1. ∑MС( j) = 0 Fjmτ |
||||
|
2. ∑MC(i) = 0 Fikτ |
||||
|
3. ∑ |
|
|
(i+ j) = 0 Fikn ; Fjmn |
|
|
F |
||||
|
4. ∑ |
|
(i) = 0 Fij ;ϕij |
||
|
F |
||||
|
|||||
|
Фj |
||||
|
MФj |
||||
ik
F
Рис. 12
19
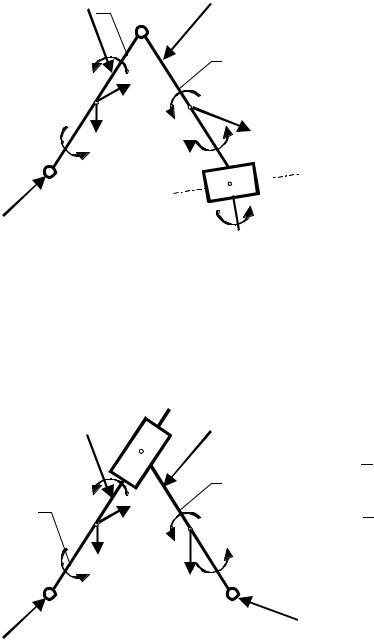
2. группа второго вида с двумя вращательными парами и одной поступательной - ВВП (рис. 13).
i
С |
1. ∑MС(i) = 0 Fikτ |
||||
|
2. ∑ |
|
|
(i+ j) = 0 Fikn ; Fjm |
|
|
F |
||||
|
3. ∑MС( j) = 0 M jm |
||||
|
4. ∑ |
|
(i) = 0 Fij ;ϕij |
||
|
F |
||||
|
|||||
|
Фj |
||||
|
MФj |
||||
ik 
 Fjm Mjm
Fjm Mjm
Рис. 13
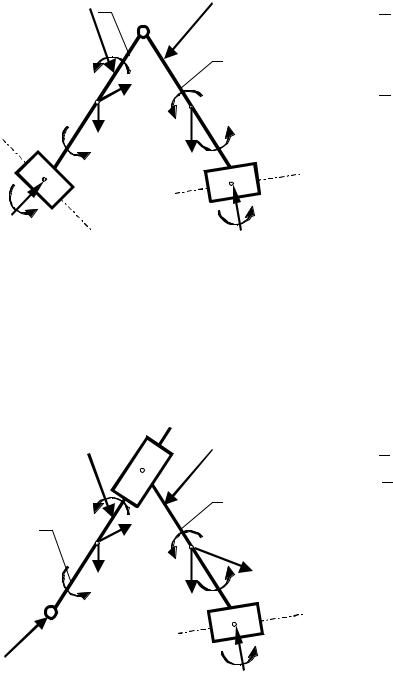
3. группа третьего вида с двумя вращательными парами и одной поступательной - ВПВ (рис. 14 ).
1. ∑M D(i+ j) = 0 Fikτ → ( BD)
2. ∑F (i) = 0 Fij ; Fikn
 Фj
Фj
3. ∑MС( j) = 0 M jm 4. ∑F ( j) = 0 Fjm
MФj
ik |
F |
Рис. 14
20
4. группа четвертого вида с двумя поступательными парами и одной вращательной - ПВП (рис. 15 ).
i
1. ∑F (i+ j) = 0 Fik ; Fjm
2. ∑MС(i) = 0 Mik 3. ∑MС( j) = 0 M jm
 Фj
Фj
4. ∑F (i) = 0 Fij ;ϕij
MФj
Fik |
Fjm Mjm |
|
Мik |
Рис. 15
5. группа третьего вида с одной вращательной парой и двумя поступательными - ВПП (рис. 16 ).
1. ∑F (i) = 0 Fij ; Fim 2. ∑F (i+ j) = 0 Fik ;ϕik
|
3. ∑M B(i+ j) = 0 M jm |
|
4. ∑MС( j) = 0 M ji |
|
Фj |
|
MФj |
ik |
Fjm |
|
Mjm |
|
Рис. 16 |
На заключительном этапе силового расчета рассматривается силовое равновесие подвижного звена 1 первичного механизма. Число возможных вариантов схем этого звена четыре: