

Коэффициент а1 характеризует скорость нарастания воздействия X(t).
Рис. 2.2. Виды типовых воздействий
2.Дать определение и указать на области использования импульсной переходной функции линейной динамической системы.
Реакция
динамической системы на это входное
воздействие называется импульсной
переходной характеристикой,
которую обычно обозначают символом
 .
Пользуясь этим понятием, можно получить
выражение для вычисления реакции системы
на воздействие произвольного типа, в
том числе и на воздействие типа непрерывной
функции времени.
.
Пользуясь этим понятием, можно получить
выражение для вычисления реакции системы
на воздействие произвольного типа, в
том числе и на воздействие типа непрерывной
функции времени.
Формально
импульсную переходную характеристику
можно определить как оригинал
по отношению к передаточной функции.
В самом деле, т.к. изображение единичного
импульса равно 1, то изображение
 можно записать как
можно записать как
 .
.
Если
импульс возникает в момент
 ,
то реакция на него будет также сдвинута
и равна
,
то реакция на него будет также сдвинута
и равна ,
причем поскольку эффект не может
предшествовать причине, вызвавшей его
, то при
,
причем поскольку эффект не может
предшествовать причине, вызвавшей его
, то при .
.
С
другой стороны любая ограниченная
функция

 может
быть представлена суммой элементарных
импульсов
может
быть представлена суммой элементарных
импульсов
 ,
,
где
 и
и
 при остальных значениях аргумента. В
силу линейности реакция системы на
сумму импульсов будет равна сумме
реакций на каждое слагаемое, т.е.
при остальных значениях аргумента. В
силу линейности реакция системы на
сумму импульсов будет равна сумме
реакций на каждое слагаемое, т.е.
 .
.
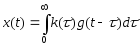
Переходя
к пределу при
 ,
получаем формулу, известную какинтеграл
Дюамеля
,
получаем формулу, известную какинтеграл
Дюамеля
 .
(10.1)
.
(10.1)
Если иметь в виду замечание о причине, вызывающей импульсную реакцию, то в формуле (10.1) верхний предел можно ограничить текущим моментом времени, т.е.
 .
(10.2)
.
(10.2)
В случае, когда входной сигнал равен нулю при отрицательных значениях аргумента в формулах (10.1) и (10.2) нижний предел интеграла также равен нулю.
Последние два выражения можно получить и более строгим путем, преобразуя по Лапласу свертку, т.е.
 (10.3)
(10.3)
В последнем выражении сделаем замену переменных, положив
 (10.4)
(10.4)
с Якобианом преобразования
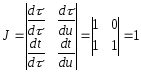 .
.
При этом область интегрирования преобразуется, как показано на
рис.10.1.

Рис.10.1. Преобразование области интегрирования при подстановке (10.4).
Тогда (10.3) примет вид
 .
(10.5)
.
(10.5)
Следовательно,
оригинал
 в формулах (10.1) и (10.2) действительно
является выходным сигналом и интеграл
Дюамеля доказан формальным путем.
в формулах (10.1) и (10.2) действительно
является выходным сигналом и интеграл
Дюамеля доказан формальным путем.
Изображения
 и
и входят в (10.5) симметрично. Поэтому
интеграл Дюамеля можно записать также
в виде
входят в (10.5) симметрично. Поэтому
интеграл Дюамеля можно записать также
в виде
 .
.
Билет № 3.
1.Математическое описание периодических и непериодических сигналов. Какие сигналы имеют изображение по Лапласу?
Функция f(t) называется периодической, если существует величина T, такая что для любого значения t f(t+T)=f(t). Наименьшая из величин T называется периодом.
Весьма широкий класс периодических функций можно разложить в ряд Фурье

 .
(2.1)
.
(2.1)
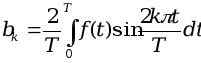
Здесь коэффициенты ak и bk вычисляются с помощью соотношений
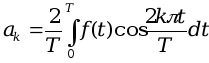 ,
,
(2.2)
Ряду Фурье можно придать комплексную форму, если воспользоваться соотношениями
 и
и
 .
.
Введем
обозначение
 и, замечая, что согласно (2.2)
и, замечая, что согласно (2.2)
 ,
запишем ряд (2.1) в комплексной форме
,
запишем ряд (2.1) в комплексной форме
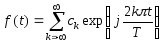 .
(2.3)
.
(2.3)
Нетрудно заметить, что коэффициенты в (2.3) вычисляются с помощью формулы, вытекающей из (2.2), а именно
 .
(2.4)
.
(2.4)
Введем
обозначение
 . Очевидно при этом приращение
. Очевидно при этом приращение
 и,
следовательно, согласно (2.3) и (2.4),
и,
следовательно, согласно (2.3) и (2.4),
 .
(2.5)
.
(2.5)
Переходя
к пределу в (2.5) при
 и обозначая
и обозначая
 ,
(2.6)
,
(2.6)
запишем
 .
(2.7)
.
(2.7)
Мы получили соотношения, которые играют в дальнейшем важную роль во всей изучаемой нами дисциплине. Это прямое (2.6) и обратное (2.7) преобразования Фурье. Предельный переход означает, что мы распространили ряд Фурье на непериодические функции, и этим существенно расширили класс исследуемых сигналов.
Заметим,
что функция
 ,
фигурирующая в формуле прямого
преобразования должна допускать
сходимость несобственного интеграла.
Разумеется, не все функции обладают
этим свойством. Например, функция1/t
не может быть преобразована по Фурье -
она недостаточно быстро убывает (кроме
того, она имеет разрыв при t=0).
Для того, чтобы гарантировать сходимость
несобственного интеграла в (2.5),во многих
случаях достаточно предварительно
умножить преобразуемую функцию на
экспоненту с отрицательным показателем,
т.е. рассматривать в дальнейшем такие
функции, которые допускают существование
интеграла
,
фигурирующая в формуле прямого
преобразования должна допускать
сходимость несобственного интеграла.
Разумеется, не все функции обладают
этим свойством. Например, функция1/t
не может быть преобразована по Фурье -
она недостаточно быстро убывает (кроме
того, она имеет разрыв при t=0).
Для того, чтобы гарантировать сходимость
несобственного интеграла в (2.5),во многих
случаях достаточно предварительно
умножить преобразуемую функцию на
экспоненту с отрицательным показателем,
т.е. рассматривать в дальнейшем такие
функции, которые допускают существование
интеграла
 (2.8)
(2.8)
Константа с называется абсциссой абсолютной сходимости, а преобразование вида (2.8) называется прямым преобразованием Лапласа.
В соответствии с введенным обозначением для параметра s можно записать и обратное преобразование (2.7) в форме

 .
(2.9)
.
(2.9)
В
математической литературе принято
называть
 изображением
изображением
по
Лапласу
функции
 ,
которая в свою очередь называетсяоригиналом.
,
которая в свою очередь называетсяоригиналом.
Пользуясь преобразованием Лапласа, мы еще более расширяем класс исследуемых сигналов. Найдем, например, изображение для
оригинала
 ,
причем параметр
,
причем параметр может быть как отрицательным, так и
положительным. Обращаясь к (2.8), находим
может быть как отрицательным, так и
положительным. Обращаясь к (2.8), находим
 .
(2.10)
.
(2.10)
Формула
(2.10) открывает широкие возможности для
получения изображений еще нескольких
оригиналов. Полагая
 ,запишем
сразу изображение для единичного скачка,
причем будем пользоваться следующей
символикой:
,запишем
сразу изображение для единичного скачка,
причем будем пользоваться следующей
символикой:
 .
(2.11)
.
(2.11)
Далее,
полагая
 и
и и пользуясь линейностью интегрального
преобразования, получим изображения
для двух гармонических функций:
и пользуясь линейностью интегрального
преобразования, получим изображения
для двух гармонических функций:
 ,
(2.12)
,
(2.12)
а также
 .
(2.13)
.
(2.13)
Из формулы (2.10)видно также, что умножение оригинала на экспоненту влечет соответствующий сдвиг в области переменного s . Таким образом,
 (2.14)
(2.14)
и
 .
(2.15)
.
(2.15)
Нам понадобится еще формула для изображения производной от оригинала. Для этого рассмотрим интеграл
 .
(2.16)
.
(2.16)
Формула (2.11) без труда распространяется на любой порядок производной:
 .
(2.17)
.
(2.17)
Применим формулу (2.17) к дифференциальному уравнению (1.1)
При нулевых начальных условиях. Обозначая для краткости
 и
и
 ,
,
имеем
 .
.
Найдем отношение
 .
(2.18)
.
(2.18)
Мы получили выражение для передаточной функции линейной динамической системы, которая в соответствии с выражением (1.3) обозначается тем же символом, что и частотный оператор.
Определение
Передаточной функцией линейной динамической системы называется отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях.