

3778
.pdf2.На необходимость разработки и внедрения комплекса мероприятий по ликвидации выявленных источников формирования чрезвычайной ситуации.
3.Безотлагательность решений по модернизации объектов водоотведения и водоочистки в городе.
4.Необходимость экологического обоснования генплана г.Воронежа с учетом плотности застройки плотно заселенных территорий, участков распространения старых сетей канализации и водоотведения.
Председатель Экспертного совета по вопросам предупреждения чрезвычайных ситуаций природного и техногенного характера при Комиссии правительства Воронежской области по предупреждению и ликвидации чрезвычайных ситуаций и обеспечению пожарной безопасности
I. I. Kosinova
ON THE EFFECTIVENESS IN SCIENTIFIC SUPPORTING THE PROJECTS IS OPERATED OF ENVIRONMENTAL AUTHORITIES И STRUCTURES EXECUTIVE AUTHORITY HAVE THE AUTHORITY TO THE EMERGENCY SITUATION
The article suggests the effectiveness in scientific supporting the projects is operated of environmental authorities и structures executive authority have the authority to the emergency situation. The article shows the results of natural or man-made disasters by of the Voronezh region. The paper presents a brief review of the problem about the unpleasant smell in Voronezh region
The expert council for natural or man-made disasters by of the Voronezh region government commission in the disaster risk managementand providing fire safety
31
УДК 614.8.084
А. В. Вытовтов, Р. В. Баранкевич
АЛГОРИТМ АВТОМАТИЗИРОВАННОЙ ИДЕНТИФИКАЦИИ РОЗЛИВА НЕФТЕПРОДУКТОВ С ДВИЖУЩЕГОСЯ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА НА ОСНОВЕ НЕЙРОСЕТИ
Разработан алгоритм автоматизации мониторинга нефтегазопроводов с беспилотного воздушного судна направленный на обнаружение розлива нефтепродуктов. В качестве устройства получения исходных данных выбрана типовая фотокамера с частотой захвата кадр в две секунды. Идентификация производится бортовым микропроцессором с использованием базы данных и нейросети обрабатывающей данные без передачи на наземную станцию управления
Анализ государственных закупок показал, что с 2017 года востребованной является услуга «Мониторинг трубопроводов с применением беспилотных летательных аппаратов». Предприятия, обслуживающие трубопроводы, имеют возможность заключить контракт на облет газонефтепроводов и получить оперативные и качественные данные мониторинга по низкой цене [1]. Традиционно для подобных целей используются вертолеты с экипажем, состоящим из специалистов по разным направлениям [2]. Каждый из которых, как правило, визуально оценивает территорию у трубопровода через иллюминатор [3]. Высокая стоимость часа полетов и низкая информативность способа побуждают компании дополнительно заказывать мониторинг с беспилотных воздушных судов. Летательные аппараты могут комплектоваться различным навесным оборудованием в зависимости от целей мониторинга. По обобщенным данным компании исполнителя работ ООО Финко, наиболее распространенными являются заказы на фото сьемку объекта мониторинга. Это обусловлено высоким качеством результатов обследования, низкой массой навесного оборудования, наличием координат у фото материалов и экономным электро потреблением на протяжении полетного задания. При этом необходимо выделить следующие недостатки: отсутствие возможности получать информацию оператором наземной станции управления в режиме реального времени, высокие трудозатраты на просмотр отснятого материала, задержка в принятии решения по результатам мониторинга, отсутствие возможности произвести пролет выявленного сектора в одном полетном задании. Типовым условием государственного контракта по данному типу работ являются задачи по обнаружению розлива нефтепродуктов, пожара, нарушения охранной зоны трубопровода [5]. В каждой цели оперативность получения данных оказывает существенное влияние на принятие решения и повышает эффективность мониторинга.
Отдельно необходимо отметить человеческий фактор. При выполнении полетов над газонефтепроводами минимальное количество персонала два человека. В их обязанности входит транспортировка к месту мониторинга, развертывание комплекса беспилотной авиационной системы, программирование полетного задания, запуск аппарата, контроль полета, посадка, перебазирование. Как правило, трубопроводы находятся в труднодоступной местности, и группа выполняет свои обязанности продолжительное время. Работникам тяжело выполнять ежедневную многочасовую работу по просмотру отснятого материала, особенно в полевых условиях, при высокой загруженности по обеспечению безопасных полетов. Описанные выше условия дают представление о части не проанализированного материала. Перед попаданием к заказчику работ полученный материал проходит проверку в Управлении федеральной службы безопасности Российской Федерации по региону, что занимает значительное время.
Перечисленные факторы свидетельствуют об острой необходимости в создании алгоритмов автоматизации процессов мониторинга газонефтепроводов [6]. Задача
32

обнаружения пламенного горения решена за счет эмпирической математической модели по ряду программных фильтров видео изображения [7].
Алгоритм автоматизированной идентификации розлива нефтепродуктов с беспилотного воздушного судна
Задача обнаружения розлива нефтепродуктов относительно пламенного горения имеет некоторые особенности затрудняющие обнаружение, а именно: розлив не светится, не выделяет дым, не мерцает, не занимает вертикальный объем в пространстве. Предпосылками для создания алгоритма явились следующие факторы: пролив нефти отличается по цвету на местности, как правило, заполняет понижения рельефа, сопряжен с участком прохождения нефтепровода (рисунок). Форма розлива может значительно различаться, количество данных не достаточно для определения с помощью математически простых программных фильтров. Для решения поставленной задачи допустимо использовать искусственную нейронную сеть.
Условием адекватного функционирования нейронной сети является большой объем обучающих данных, позволяющих программе делать выводы о смежных результатах объекта исследования относительно эталона. В рамках исследования поставщиком исходных данных является партнер проекта ООО Финко г. Ижевск. Задача автоматизации процесса идентификации разделена на два этапа. Первый этап создание программного продукта работающего на стационарном компьютере для облегчения работы оператора на земле. Второй этап создание программного продукта интегрированного в летательный аппарат, с обеспечением работы в режиме реального времени. Принципиальная структура работы алгоритма обнаружения представлена выше. В реализации проекта зарегистрирована и разработана программы для ЭВМ RU 2019615393, 25.04.2019 «Видеодетектор розлива нефтепродуктов 1.0(PD)» [8]. Выводы о математической точности алгоритма, программы и применимости разработанного подхода можно только после экспериментального подтверждения результатов исследования [9].
33
Использование искусственной нейронной сети требует больших вычислительных мощностей микропроцессора, но позволяет по не явным признакам проанализировать изображение и автоматизировать процесс мониторинга.
Литература
1.Степанов Р. А., Белкин Д. С., Перевалов А. С. Перспективы развития и применения беспилотных воздушных судов в МЧС России / Р. А.Степанов, Д. С. Белкин, А. С. Перевалов // Проблемы управления рисками в техносфере. – 2017. – № 2(42). – С. 36-43.
2.Вытовтов А. В., Калач А. В., Трофимец В. Я. Методика автоматизированного мониторинга линейных объектов нефтегазового комплекса с беспилотного воздушного судна / А. В. Вытовтов, А. В. Калач, В. Я. Трофимец // Пожаровзрывобезопасность. – 2018. – Т.27. – № 4. – С.50-57.
3.Королев Д. С. Методика прогнозирования пожароопасных свойств продуктов нефтепереработки для обеспечения пожарной и промышленной безопасности : дис. ... канд. техн. наук. — Воронеж, 2017. — 105 c.
4.Королев Д. С., Калач А.В., Зенин А. Ю. Важность принятия решений при обеспечении пожарной безопасности / Д. С. Королев, А. В. Калач, А. Ю. Зенин // Вестник Воронежского института ГПС МЧС России.
–2015. – № 2(15). – С. 42-46.
5.Capitan J., Merino L., Ollero A. Cooperative decision-making under uncertainties for multi-target surveillance with multiples UAVs // Journal of Intelligent and Robotic Systems. — 2016. — Vol. 84, No. 1-4. — P. 371–386.DOI: 10.1007/s10846-015-0269-0.
6.Вытовтов А.В. Методика применения беспилотных воздушных судов для обеспечения пожарной безопасности на нефтегазовых объектах: дис. … канд. техн. наук. СПб., 2018. – 112 с.
7.Патент на изобретение RU 2669310, 09.10.2018. Экспресс-способ автоматического распознания пламени с борта беспилотного воздушного судна / А. В. Вытовтов, Д. С. Королев, С. А. Шевцов, А. В. Калач // Заявка № 2017138353 от 02.11.2017.
8.Свидетельство о регистрации программы для ЭВМ RU 2019615393, 25.04.2019. Видеодетектор розлива нефтепродуктов 1.0 (PD) / А. В. Вытовтов, Р. В. Баранкевич, А. В. Калач // Заявка № 2019614126 от 15.04.2019.
9.Патент на изобретение RU 2692241, 24.06.2019. Экспресс-способ прогнозирования пожароопасных свойств антрахинона и красителей на его основе с использованием молекулярных дескрипторов и искусственных нейронных сетей / Д. С. Королев // Заявка № 2018120058 от 30.05.2018.
Воронежский институт повышения квалификации сотрудников ГПС МЧС России, г. Воронеж, Россия Главное управление МЧС России по Воронежской области, г. Воронеж, Россия
А. V. Vytovtov, R. V. Barankevich
ALGORITHM FOR AUTOMATED IDENTIFICATION OF PETROLEUM FILLING FROM A MOVING UNMANNED AIRCRAFT BASED ON A NEURAL NETWORK
An algorithm has been developed for automating monitoring of oil and gas pipelines from an unmanned aerial vehicle aimed at detecting oil product spills. A typical camera with a capture frequency of a frame of two seconds was selected as the device for obtaining the initial data. Identification is performed by an on-board microprocessor using the database and a neural network processing data without transmission to a ground control station
Voronezh institute of Advanced Training of Employees of the EMERCOM of Russia, Voronezh, Russia Main Directorate of the Ministry of Emergencies of Russia for the Voronezh Region, Voronezh, Russia
34
УДК 621.396.9
В. П. Лихачев, Е. Е. Пугач, К. Н. Строев
МАЛОГАБАРИТНЫЙ НИЗКОПОТЕНЦИАЛЬНЫЙ РАДАР КОМПЛЕКСА ОБНАРУЖЕНИЯ И БЛОКИРОВАНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Изложены принципы функционирования и технические характеристики малогабаритного низкопотенциального радара кругового обзора. Радар обеспечивает обзор пространства в верхней полусфере, обнаружение, определение координат и скорости беспилотных летательных аппаратов. Полученная радаром информация выдается комплексу радиотехнического обнаружения и блокирования беспилотных летательных аппаратов для недопущения террористических действий и нарушений безопасности на транспорте
Количество беспилотных летательных аппаратов (БПЛА) различного типа и области их применения непрерывно растут. БПЛА могут стать эффективным средством террористических действий и нарушения безопасности на транспорте (аэропорты, железные дороги, порты и др.) [1-5]. Современные БПЛА малого класса (самолетного типа и типа квадрокоптера) могут воздействовать на охраняемые объекты из верхней полусферы (углы места более 45 градусов). «Классические» обзорные радары имеют недостатки в части обнаружения БПЛА (наличие «мёртвой воронки» и «слепой зоны»), что создаёт серьёзные проблемы при обеспечении мероприятий антитеррора и безопасности на транспорте. На практике, в условиях сложного рельефа местности, очень высока вероятность пропуска маловысотных БПЛА со сниженной радиолокационной заметностью обзорными РЛС ПВО. Средства радиотехнического мониторинга (РТМ) [6] не способны обнаруживать БПЛА, работающие в режиме радиомолчания, а средства оптической разведки ограничены условиями прозрачности атмосферы.
Отсутствуют малогабаритные низкопотенциальные РЛС (МН РЛС) кругового обзора (КО), способные на дальности до нескольких километров обнаруживать на фоне земной поверхности (в «слепых зонах») и на фоне открытого пространства (в «мертвой воронке») низколетящие БПЛА малого класса (самолетного типа и типа квадрокоптера), которые в современных условиях представляют большую угрозу. Необходимо не только установить факт наличия таких БПЛА в зоне ответственности, но и сопровождать их, и выдавать целеуказания, например, комплексам радиоэлектронного блокирования. В связи с необходимостью создания подобных РЛС, способных на дальности до нескольких километров, без «слепых зон» и в «мертвой воронке» обнаруживать БПЛА малого класса и выдавать целеуказания потребителям, в АО «НИИ СТТ» (г. Смоленск) разработан и произведен экспериментальный образец МН РЛС КО.
Целью данной статьи является описание принципов функционирования и технических характеристик МН РЛС КО АО «НИИ СТТ» (г. Смоленск), обеспечивающей выдачу целеуказаний комплексам радиотехнического обнаружения и блокирования (КОИБ) БПЛА.
Решения, положенные в основу технологии низкопотенциального радиолокационного обнаружения маловысотных малозаметных воздушных целей, основаны на построении трансформируемого радиолокационного поля, параллельном обзоре пространства несколькими каналами, применении широкополосных квазинепрерывных зондирующих сигналов, имеющих низкую спектральную плотность мощности, обработке сигналов в гомодинном приемнике и когерентного их накопления [7-9].
Внешний вид антенных систем МН РЛС КО показан на рис. 1а и 1б, а их диаграммы направленности (ДН) - на рис. 1в. В МН РЛС КО реализован:
электронный обзор пространства вкруговую по азимуту и по углам места выше 20 ;
35

период обзора во всех лучах ДН антенной системы не более 3 с, а в зенитных секторах - 1,5 с;
четырехканальный приемник с цифровой обработкой сигналов и реализацией режимов работы: обнаружение и распознавание.
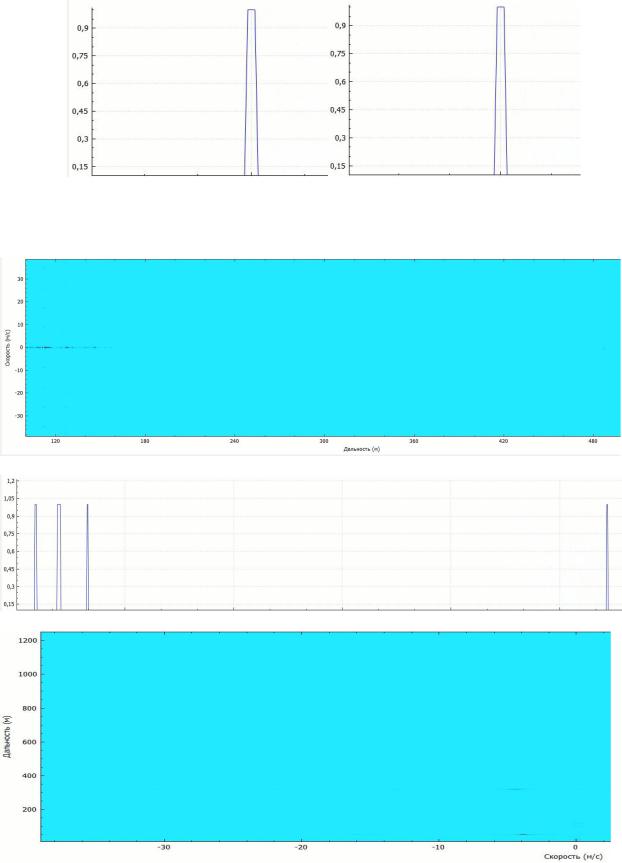
Алгоритм первичной обработки эхо-сигналов в МН РЛС КО заключается в вычислении в реальном масштабе времени двумерного преобразования Фурье в системе цифровой обработки по данным, поступающим с АЦП, и обработки дальностно-скоростного изображения (рис. 2,а – 4,а) алгоритмом обнаружения с постоянным уровнем ложной тревоги. Отсутствие механического обзора пространства позволяет формировать стабильную карту местных отражений в интересах их межобзорной компенсации и определение параметров движения БПЛА [10-11].
Достигнутые характеристики МН РЛС КО и их сравнение с РЛС РАДЕСКАН показаны в табл. 1. Дальность обнаружения БПЛА малого класса 2 км проверялась с использованием БПЛА самолетного типа «Мерлин-21Б» и коптерного типа «Скарабей» (Производство АО «НИИ СТТ» (г. Смоленск).
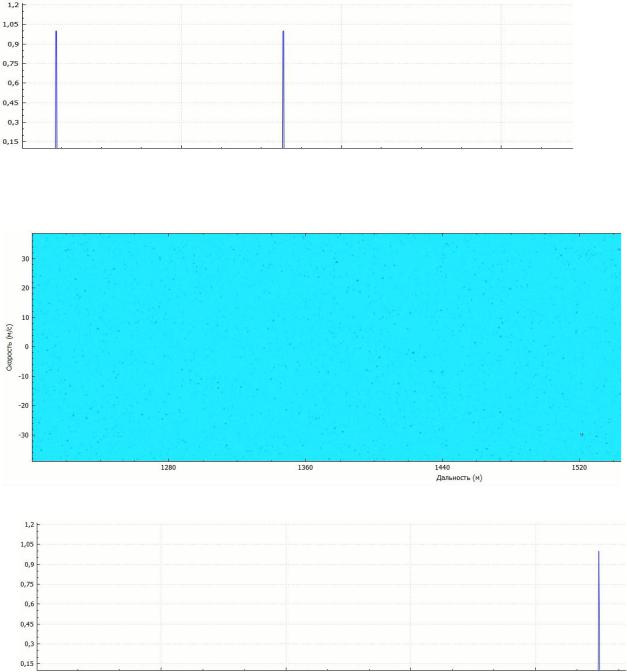
Результаты работы МН РЛС КО, показанные на рис. 2–4, свидетельствуют о возможности: обнаружения миниБПЛА коптерного типа на расстоянии до 500м (рис. 2 и 3,а,б); наблюдения и сопровождения нескольких БПЛА в каждом пространственном канале (рис. 3,в,г) и обнаружения и определения дальности и скорости БПЛА самолетного типа на расстоянии до 2 км со скоростью до 39 м/с (рис. 4). МН РЛС КО позволяет автоматически обнаруживать зависшие БПЛА мультикоптерного типа по доплеровским составляющим вращающихся винтов (рис. 2), а при наличии соответствующих алгоритмов распознавать тип БПЛА по спектру сигнала.
а) |
б) |
36
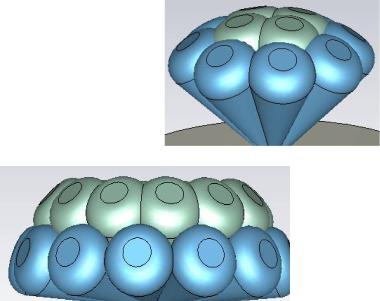
в)
Рис. 1. Внешний вид а) приемной и б) передающей антенных систем МН РЛС КО и в) диаграмма направленности приемных антенн
Целеуказания по малогабаритным БПЛА самолетного и коптерного типа, обнаруженным МН РЛС КО, могут выдаваться в комплекс радиотехнического обнаружения и блокирования (КОИБ) каналов управления и навигации БПЛА «Стриж-3», показанного на рис. 6 (производство АО «НИИ СТТ» (г. Смоленск)). Основные характеристики КОИБ БПЛА «Стриж-3» представлены в табл. 2.
|
|
|
Таблица 1 |
Характеристики малогабаритных низкопотенциальных РЛС |
|||
Характеристика РЛС |
РАДЕСКАН |
|
МН РЛС КО |
|
|
|
|
|
|
Значение |
|
|
|
|
|
Средняя мощность излучения, мВт, не более |
100 |
|
2000 |
|
|
|
|
Ширина рабочего сектора по азимуту, град |
90 |
|
360 |
|
|
|
|
Ширина рабочего сектора по углу места, град |
23 |
|
70 (20…90) |
|
|
|
|
Максимальная дальность обнаружения объекта (ЭПР не менее |
1 000* |
|
|
0,01 м2), м |
|
|
11001) |
|
|
|
|
Максимальная дальность обнаружения объекта (ЭПР не менее 0,1 |
1 500 |
|
|
м2), м |
|
|
20002) |
|
|
|
|
Влияние осадков на дальность обнаружения, м |
Да |
|
Нет |
|
|
|
|
Количество каналов обнаружения |
1 |
|
4 |
|
|
|
|
Одновременно вычисляемые траектории объектов |
32 |
|
36 |
|
|
|
|
Период обнаружения траектории объекта, не более, с |
3 |
|
1,5 … 3 |
|
|
|
|
37 |
|
|
|

|
|
Окончание табл. 1 |
Точность определения дальности, не более, м |
8 |
0,1 / 33) |
|
|
|
Диапазон дальностей обнаружения, км |
1,5 |
2 / 93) |
|
|
|
Точность определения азимута объекта, град |
0,5 |
30 |
|
|
|
Диапазон радиальных скоростей объектов, км/ч |
6...150 |
0,36 …140/ 1903) |
|
|
|
Точность определения скорости объекта, м/с |
≈ 6 |
0,1 |
|
|
|
Определение угла места (высоты) цели |
Нет |
4 эшелона |
|
|
|
1) – по БПЛА типа Фантом-4; 2) – поБПЛА типа «Мерлин-21Б»; 3) – режим работы «обнаружение».
В ходе натурного эксперимента были подтверждены характеристики МН РЛС КО и КОИБ БПЛА:
1.Возможность обнаружения, определения координат и сопровождения маловысотных БПЛА со сниженной радиолокационной заметностью средствами МН РЛС КО.
2.Высокое разрешение МН РЛС КО по дальности и скорости.
3.Возможность радиотехнического обнаружения целей средствами КОИБ с определением их принадлежности к БПЛА и классификации целей по типу.
4.Возможность определения некоординатных параметров целей средствами МН РЛС КО и КОИБ.
5.Возможность подавления сигналов навигации средствами КОИБ и обновления базы данных БПЛА
Управление и контроль функционированием МН РЛС КО и КОИБ может осуществляться дистанционно и автоматизировано из одного пункта управления.
а) момент времени t1 |
б) момент времени t2 |
38
в) момент времени t1 |
г) момент времени t2 |
Рис. 2. Внешний вид а) и б) дальностно-скоростного индикатора и в) и г) индикатора автоматического обнаружителя МН РЛС КО при обнаружении зависшего БПЛА – мультикоптера типа Фантом-4 по доплеровским составляющим вращающихся винтов
а)
б)
в)
39
г)
Рис. 3. Внешний вид а) и в) дальностно-скоростного индикатора и б) и г) индикатора автоматического обнаружителя МН РЛС КО при наблюдении: а) и б) мультикоптера типа Мейвик Про, зависшего на расстоянии 490 м; в) и г) двух удаляющихся БПЛА – мультикоптеров типа Фантом-4 на расстоянии 50 м и 375 м
а)
б)
Рис. 4. Внешний вид а) дальностно-скоростного индикатора и б) индикатора автоматического обнаружителя МН РЛС КО при наблюдении на дальности 1520 м удаляющегося со скоростью 30 м/с БПЛА «Мерлин–21Б»
МН РЛС КО и КОИБ БЛА совместно реализуют круговой обзор, обнаружение, распознавание и блокирование БПЛА в районе «мертвой воронки» (в верхней полусфере) обзорных РЛС, в условиях сложного рельефа местности в районах отсутствия маловысотного радиолокационного поля. Это позволяет расширить функциональные возможности существующих и перспективных радиоэлектронных комплексов, повысить безопасность на транспорте (аэропорты, железные дороги, порты и др.).
В связи с этим разработка и совместное использование МН РЛС КО и КОИБ, как единой системы, обеспечит расширение круга решаемых задач:
–создание позиционно-распределенной системы обнаружения и блокирования БПЛА
сцентрализованным управлением;
40