

Системы автоматического управления электроприводами: лабораторный практикум. Медведев В.А., Романов А.В
.pdfФГБОУ ВО “Воронежский государственный технический университет”
В.А. Медведев А.В. Романов
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ: ЛАБОРАТОРНЫЙ ПРАКТИКУМ
Утверждено учебно-методическим советом университета в качестве учебного пособия
Воронеж 2017

УДК 62-83.01(075)
Медведев В.А. Системы автоматического управления электроприводами: лабораторный практикум: учеб. пособие / В.А. Медведев, А.В. Романов. Воронеж: ФГБОУ ВО “Воронежский государственный технический университет”, 2017. – 100 с.
Учебное пособие содержит теоретические сведения о синтезе цифровых контуров регулирования электроприводов, построении системы управления вентильного электропривода, расчете параметров регуляторов при векторном управлении асинхронным электроприводом. Сформулированы предварительное и рабочее задания на лабораторные работы, требования к содержанию отчетов и контрольные вопросы.
Издание соответствует требованиям Федерального государственного образовательного стандарта высшего образования по направлению 13.04.02 “Электроэнергетика и электротехника” (направленность “Электроприводы и системы управления электроприводов”), дисциплине “Системы автоматического управления электроприводами”.
Учебное пособие предназначено для студентов 2 курса, а также представляет интерес для преподавателей, аспирантов и инженеров, связанных с разработкой и исследованием систем автоматического управления электроприводами.
Табл. 10. Ил. 28. Библиогр.: 10 назв.
Рецензенты: кафедра электроэнергетики Международного института компьютерных технологий (зав. кафедрой д-р техн. наук, проф.
А.Н. Анненков); канд. техн. наук, доц. А.П. Харченко
сМедведев В.А., Романов А.В., 2017
сОформление. ФГБОУ ВО
“Воронежский государственный технический университет”, 2017
2
ВВЕДЕНИЕ
Учебная дисциплина “Системы автоматического управления электроприводами” соответствует программе подготовки магистров “Электроприводы и системы управления электроприводов”, обучающихся по направлению 13.04.02 “Электроэнергетика и электротехника”.
Тенденции развития современного автоматизированного электропривода состоят в постоянном увеличении доли цифровых систем управления электроприводами в промышленности и сельском хозяйстве, а также в переходе от регулируемых приводов постоянного тока к вентильным электроприводам и асинхронным электроприводам с векторным управлением. Вопросы расчета, моделирования и экспериментального исследования таких приводов составили основу лабораторного практикума по дисциплине “Системы автоматического управления электроприводами”.
В том случае, когда исполнительный орган рабочей машины должен двигаться по сложной пространственной траектории, для перемещения его центра тяжести требуются три индивидуальных электропривода, и еще три привода нужны для ориентации рабочего органа; то есть всего требуются шесть индивидуальных электроприводов. К таким многокоординатным устройствам относятся манипуляторы промышленных роботов.
Вопросы управления манипуляторами рассмотрены в учебных пособиях [1], [2], основы моделирования роботов и робототехнических систем – в работах [3]÷[6].
Данный лабораторный практикум посвящен вопросам проектирования цифровых контуров регулирования, экспериментального исследования многокоординатного цифрового электропривода, расчета и моделирования вентильного электропривода и асинхронного электропривода с векторным управлением в системе MATLAB. Сформулированы предварительные и рабочие задания на лабораторные работы, требования к содержанию отчетов и контрольные вопросы.
3
ЛАБОРАТОРНЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
Лабораторный стенд предназначен для исследования системы автоматического управления многокоординатным электроприводом. Блоки управления координат имеют в своем составе PIC-микроконтроллеры, широтно-импульсные преобразователи и обеспечивают управление исполнительными двигателями в соответствии с принципом подчиненного регулирования с обратными связями по току, скорости и положению.
Функциональные возможности стенда:
управление исполнительными двигателями по интерфейсу RS-485;
управление двигателями с помощью дискретных и аналоговых сигналов;
программная настройка ПИД-регуляторов для управления скоростью вращения двигателей;
настройка параметров и режимов работы индивидуальных электроприводов по интерфейсу RS-485;
защита от короткого замыкания;
получение по интерфейсу RS-485 информации о скоростях двигателей и параметрах состояния блоков управления.
Режимы работы блоков управления стенда: стабилизация скорости вращения двигателя по уровню
противо-ЭДС (Ст1); стабилизация скорости вращения двигателя с обратной
связью от инкрементального энкодера (Ст2); слежение за внешним аналоговым сигналом (Сл); ограничение момента на валу двигателя (М).
Стенд позволяет исследовать влияние структуры и параметров блоков управления координат на статические и динамические свойства индивидуальных электроприводов.
Верхний уровень системы автоматического управления многокоординатным электроприводом даёт возможность изучения алгоритмов позиционного и контурного типа.
4
Основные технические характеристики лабораторного стенда приведены в табл. 1.
|
Таблица 1 |
|
|
|
|
Технические характеристики |
Значение |
|
|
|
|
Напряжение питающей сети, В |
220 |
|
|
|
|
Количество регулируемых координат |
6 |
|
|
|
|
Номинальная мощность блока управления одной |
240 |
|
координаты, Вт |
||
|
||
|
|
|
Номинальное напряжение на выходе широтно- |
24 |
|
импульсного преобразователя координаты, В |
||
|
||
|
|
|
Номинальный ток преобразователя, А |
10 |
|
|
|
|
Максимальное аналоговое напряжение задания |
5 |
|
скорости и перемещения, В |
||
|
||
|
|
При эксплуатации стенда необходимо выполнять следующие инструкции.
1.Включение питания осуществляется автоматом на лицевой панели стенда.
2.Во всех режимах работы индивидуального электропривода координаты ток нагрузки широтно-импульсного преобразователя не должен превышать 10 А.
3.Не допускается скачкообразное изменение сигнала задания скорости на максимальную величину при пуске, торможении и реверсе двигателей.
4.Для ограничения нагрузок механической части привода при управлении скоростью двигателя с помощью интерфейса RS-485 скачкообразное изменение скорости не должно превышать 10 рад/c.
5.При срабатывании защиты по току необходимо отключить автомат питания на лицевой панели стенда. После устранения причины перегрузки, но не ранее чем через 30 с, нужно включить питание и тем самым возобновить работу.
6.Изменения тока исследуемого индивидуального электропривода контролировать, подсоединяя к выводам шунта соответствующей координаты осциллограф С1-83.
5
ЛАБОРАТОРНАЯ РАБОТА № 1
ИССЛЕДОВАНИЕ ЦИФРОВОЙ СИСТЕМЫ В РЕЖИМАХ СТАБИЛИЗАЦИИ СКОРОСТИ
ПО УРОВНЮ ПРОТИВО-ЭДС И ПО ИМПУЛЬСАМ ОТ ИНКРЕМЕНТАЛЬНОГО ЭНКОДЕРА
Цель работы: Изучение математического описания цифровых систем управления с учетом их дискретности. Исследование цифровой системы управления электропривода в режимах стабилизации скорости по уровню противо-ЭДС и с обратной связью от инкрементального энкодера.
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Понятие цифровой системы управления электропривода
К цифровым системам управления (ЦСУ) относятся системы, состоящие из цифровых элементов. Термин «цифровой элемент» (ЦЭ) означает конструктивную электротехническую единицу дискретного действия, выполняющую определенные функции – логические, вычислительные, преобразовательные, запоминания сигналов. В составе цифровой системы управления эти элементы выполняют требуемые задачи управления.
На рис. 1 приведена схема цифровой системы управления координатой х электропривода, где ЦЗУ – цифровое задающее устройство, ЦС – цифровой сумматор, ЦР – цифровой регулятор, ЦАП – цифроаналоговый преобразователь, АЦП – аналогово-цифровой преобразователь, УП-Д – система управляемый преобразователь–двигатель, в которой УП является выходной исполнительной частью системы управления электроприводом. Заглавными латинскими буквами обозначены многоразрядные цифровые сигналы.
Входной цифровой сигнал хз0 устанавливает исходные параметры для х3, например, xзmax , xзmax , xзmax , что означает для выходной управляемой координаты электропривода х, например, для перемещения, соответственно заданные значения перемещения, максимально допустимые скорость и ускорение.
6
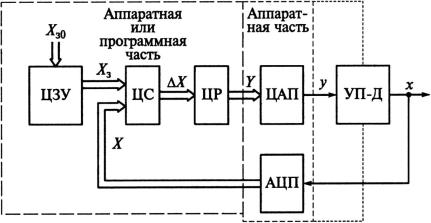
Рис. 1. Схема цифровой системы управления одной координатой электропривода
Данная схема цифровой системы управления по своей структуре аналогична непрерывной системе управления электроприводом [7] с теми же функциональными узлами, кроме ЦАП и АЦП, но выполненными на аналоговых элементах.
Достоинства цифровой системы управления определяются достоинствами цифровых элементов по сравнению с аналоговыми – большими помехоустойчивостью и точностью датчиков скорости и положения, простотой и удобством цифрового задания программы на движения электропривода, неуклонной тенденцией к снижению габаритов и стоимости ЦЭ, к повышению надежности и степени интеграции цифровых узлов.
Функциональные узлы цифровой системы управления, показанные на рис. 1, в современных системах управления реализуются программно, т.е. выполняются на едином универсальном цифровом устройстве – микроконтроллере и алгоритм их функционирования определяется программой работы этого устройства. При программном способе для изменения алгоритма управления требуется лишь изменение программы на той же элементной базе.
7

Цифровые системы, как и непрерывные системы управления электроприводов, формируют те же требуемые задачами управления алгоритмы, используют те же методы управления – модального управления, подчиненного регулирования, последовательной и параллельной коррекции и т.п. Однако в реализации алгоритмов управления может проявляться дискретность цифровой системы управления, отражающаяся на динамических и точностных показателях электропривода. Поэтому рассмотрим способы учета дискретностей цифровой системы управления электроприводом при синтезе цифровых регуляторов.
Расчетные модели цифровой системы управления с учетом дискретности по уровню
При любом способе построения цифровой системы управления дискретное представление значений цифровых переменных, определяемое конечным числом их разрядов, вносит отличие в преобразование сигнала по сравнению с непрерывными системами управления электроприводов. Эта так называемая дискретность по уровню, или квантованность по уровню.Оценим влияние данной дискретности на преобразование сигнала в цифровом элементе.
Наибольшая квантованность сигнала в цифровых датчиках, представляющих собой аналогово-цифровые преобразователи (АЦП) и цифроаналоговые преобразователи (ЦАП).
Рассмотрим АЦП. Квантованность по уровню выражается в многоступенчатой характеристике управления (рис. 2, а).
Такая характеристика вносит нелинейность в ЦСУ. Передаточный коэффициент АЦП, представляющий собой отношение единицы выходной величины к единице входной величины (∆х0)
kАЦП = 1/ x0 = x0-1 |
(1) |
определяет только усредненную выходную переменную
уср = kАЦП x. |
(2) |
8

б)
|
|
в) |
|
а) |
|||
|
|
||
|
|
|
Рис. 2. Характеристика управления (а), уточненная (б) и упрощенная (в) расчетные модели АЦП
Если заменить выходную переменную у на переменную х' в масштабе входной величины х, то разность
х' – х = хп |
(3) |
определит помеху от квантованности по уровню в виде периодической функции от х. Тогда описание нелинейной характеристики АЦП будет определяться выражениями
|
|
|
|
|
|
|
n |
|
|
у |
х |
1 |
х , |
х х |
х , |
х |
х |
, |
|
|
0 |
|
|
п |
п |
пi |
|
(4) |
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
хпi |
(x i |
|
х0 ), при (i 0,5) |
х0 x |
(i 0,5) х0 ,иначе хпi 0, |
|
|||
которым соответствует расчетная модель АЦП, приведенная на рис. 2, б.
Средний квадрат ошибки от квантования будет определяться как дисперсия помехи
9
|
1 |
0,5 |
х0 |
|
х |
2 |
|
|
х 2 |
|
|
( х)2 dx |
0 |
. |
(5) |
||
|
|
|
|
|||||
|
|
|
|
|
||||
п |
х0 0,5 |
|
|
12 |
|
|
||
|
х0 |
|
|
|
||||
При интегральной оценке влияния помехи квантования расчетная модель АЦП упрощается (рис. 2, в). Преобразователь представляется линейным звеном, на входе которого кроме полезного сигнала х действует помеха хп типа «белого шума» с равновероятными значениями в пределах от -0,5 х0 до 0,5 х0 с корреляционной функцией
R (τ) |
х 2δ(t), |
(6) |
п |
п |
|
где (t) – дельта-функция, и спектральной плотностью, равной дисперсии помехи:
|
|
|
х 2 |
х2 |
|
|
S |
|
(ω) |
0 |
. |
(7) |
|
п |
|
|||||
|
|
п |
12 |
|
|
|
|
|
|
|
|
|
|
В таком представлении АЦП влияние помехи от квантования сигнала можно учесть интегральной оценкой ошибки регулирования х координаты электропривода
х 2 |
1 |
|
|
2 |
|
|
х 2 |
|
|
2 |
|
|
|
|
W ( jω) |
|
S |
(ω)dω |
0 |
|
W ( jω) |
|
dω, |
(8) |
|
|
|
|
|
|||||||||
|
π |
|
п |
|
п |
|
12π |
|
п |
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
где Wп ( jω) – модуль передаточной функции системы регулирования по каналу помехи квантования, равный x / xп .
Таким образом, имеются три варианта расчетной модели АЦП с квантованным по уровню выходным сигналом:
модель 1 – нелинейное звено с многоступенчатой релейной характеристикой управления (см. рис. 2, а), характеризуемой структурной схемой, показанной на рис. 2, б;
модель 2 – линейное звено с дополнительным сигналом в виде помехи, имеющей вероятностный характер типа «белого шума» с постоянной спектральной плотностью, равной дисперсии помехи (см. рис. 2, в);
модель 3 – линейное непрерывное звено без учета квантованности в соответствии с выражением (2).
10