

2854
.pdfI |
|
1 |
( |
|
L I |
|
), |
I |
|
L12 |
I |
|
. |
(102) |
2 x |
|
2 x |
1x |
2 y |
|
1y |
||||||||
|
L2 |
12 |
|
|
L2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
С учетом (102) уравнения (100) преобразуются к виду
1х = k2 2х + L1 I1x, 1у = L1I1y, (103)
где k2 = L12 /L2' – коэффициент электромагнитной связи ротора;
L2
1 12 – коэффициент рассеяния магнитного поля АД.
L1L2
Подставив (103) в (98), для статорной цепи АД получим
U1x |
k2 |
d |
2 x |
|
L1 |
dI1x |
I1x R1 |
L1I1y 0эл , |
||
|
|
dt |
|
dt |
|
|||||
|
|
|
dI1y |
|
|
|
|
|
(104) |
|
U1y |
L1 |
|
I1y R1 |
(k2 2 x |
L1I1x ) 0эл. |
|||||
|
|
|||||||||
dt |
|
|||||||||
Уравнения (99) для роторной цепи с учетом (102) преобразуются к виду
|
|
|
d 2 x |
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(105) |
|||||||||
|
|
|
|
|
|
|
|
|
|
k2 R2 I1x |
|
|
|
2 x , |
( |
|
0эл |
pп ) |
2 x |
k2 R2 I1y . |
||||||||||||||
|
|
|
dt |
|
|
|
|
|
L2 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
С учетом (105) уравнения (104) примут вид |
|
|
|
|
|
|
|||||||||||||||||||||||||
U |
|
|
k |
|
|
R2 |
|
|
|
|
|
L I |
|
|
|
I |
(R k |
2 R ) |
|
L |
dI1x |
, |
|
|
|
|
||||||||
|
|
2 L |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
1x |
|
|
|
2 x |
|
1 1y 0эл |
|
1x |
|
|
1 2 2 |
|
1 dt |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
U |
|
|
L |
dI1y |
|
I |
(R k |
2 R ) (k |
|
|
|
|
k 2 R I |
) |
|
L I |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
1y |
1 dt |
|
|
|
1y |
|
1 |
|
2 2 |
|
|
|
2 2 x 0эл |
|
2 2 1y |
|
|
|
1 1x 0эл |
||||||||||||||
|
L |
dI1y |
|
|
I |
|
|
(R k 2 R ) (k |
|
|
|
|
|
k |
|
|
|
|
k |
|
p |
|
|
) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
1 dt |
|
|
|
|
1y |
|
1 |
|
2 2 |
|
|
2 2 x 0ээ |
|
2 2 x 0эл |
|
|
2 п |
2 x |
|
||||||||||||||
|
L I |
|
|
|
|
|
|
|
k |
p |
|
|
|
|
L I |
|
|
|
|
I |
(R k 2 R ) |
|
|
L |
dI1y |
. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
1 1x 0эл |
|
|
|
2 п |
|
2 x |
|
1 1x 0эл |
1y |
|
1 |
|
2 2 |
|
|
|
1 dt |
|
|||||||||||||||
(106)
Если представить в осях х, y составляющие ЭДС, наводимые в статоре, как
81

Е1х k2 |
|
R2 |
2 x L1I1y |
0эл , Е1y k2 pп 2 x L1I1x |
0эл , (107) |
|
L |
||||
|
2 |
|
|
|
|
где выражение k2(R2'/L2') |
2x = (k2 I2x' + k22I1x)R2' определяет па- |
||||
дение напряжения в роторной цепи АД, выражения |
L1I1y 0эл |
||||
и L1I1х |
0эл |
характеризуют ЭДС самоиндукции или падение |
|||
напряжения на индуктивном сопротивлении цепи статора, а k2 pп  2x учитывает составляющую ЭДС вращения, наводимую в статоре потокосцеплением ротора.
2x учитывает составляющую ЭДС вращения, наводимую в статоре потокосцеплением ротора.
Тогда уравнения (106) примут вид
U1x = – Е1x + (R1 +k22R2')I1x + L1(dI1x /dt),
(108)
U1y = Е1y + (R1 +k22R2')I1y + L1(dI1y /dt)
или в операторной форме
U1x(р) + Е1x(p) = R1э(1 + Т1э р)I1х(р),
(109)
U1y(р) – Е1y(р) = R1э(1 + T1э p)I1y(p),
где R1э = R1 + k22 R2' – эквивалентное активное сопротивление цепи статора;
T1э= L1/R1э – электромагнитная постоянная времени цепи статора.
Для цепи ротора уравнения (105) в операторной форме будут иметь вид
|
|
|
2 х ( р) |
L12 |
|
I1x |
( р), |
|
|||
|
|
|
T p 1 |
|
|||||||
|
|
|
|
2 |
|
|
|
|
|
|
(110) |
|
|
|
|
|
|
|
|
|
L12 |
|
|
[ |
|
( р) |
р ( р)] |
|
( р) |
|
I |
( р), |
|||
0эл |
2 х |
|
|
||||||||
|
|
п |
|
|
|
|
|
1y |
|
||
|
|
|
|
|
|
|
|
|
T2 |
|
|
где T2 = L'2 /R'2 – электромагнитная постоянная времени цепи ротора.
В соответствии с выражением (96) электромагнитный момент АД при ориентации 2 по оси х в операторной форме определится так:
82

M ( р) |
3 |
p k |
Ψ |
|
( р)I |
( р). |
(111) |
|
|
2 x |
|||||||
|
2 |
п 2 |
|
|
1y |
|
|
|
|
|
|
|
|
|
|
|
|
Уравнение движения электропривода: |
|
|||||||
M(p) – Мс(р) = Jp |
(p). |
(112) |
||||||
Система управления с прямой ориентацией по вектору потокосцепления ротора АД
Функциональная схема системы регулирования скорости АД при питании его от преобразователя частоты (ПЧ) на основе автономного инвертора напряжения с управлением по
вектору Ψ2 представлена на рис. 26.
Подобная система векторного управления Transvektor предложена фирмой Siemens (ФРГ). Система имеет два внешних контура регулирования – модуля вектора потокосцепления ротора | 2| и угловой скорости двигателя, а также два подчиненных им внутренних контура регулирования составляющих тока статора I1x и I1y в осях x и у ортогональной системы координат, вращающейся с синхронной скоростью 0эл поля АД.
Система осуществляет независимое регулирование модуля вектора потокосцепления ротора и скорости ротора при сохранении прямой пропорциональности между моментом двигателя и составляющей намагничивающей силы статора, перпендикулярной вектору потокосцепления ротора. Сигнал задания потокосцепления ротора | 2|з формируется в вычислительном устройстве ВУ, использующем математическую модель АД и вводимые в нее реальные параметры двигателя: активные и реактивные сопротивления цепей статора и ротора, число пар полюсов, номинальные значения мощности, скорости, напряжения и тока статора, их частоты, КПД и мощности.
На рис. 26 вводимые параметры двигателя изображены в виде совокупности внешних сигналов Хвн на входе ВУ. Внешний сигнал задания скорости двигателя з подается на вход задатчика интенсивности ЗИ, формирующего темп изменения скорости двигателя в соответствии с требуемыми ограничениями.
83

84
Рис. 26. Функциональная схема системы регулирования скорости АД с управлением по вектору потокосцепления ротора

Измерение текущих значений скорости, потокосцепления ротора и токов статора АД производится с помощью датчиков скорости (тахогенератор ТГ), потока (ДП) и тока (ДТ).
Датчик потока преобразует измеренные с помощью датчиков Холла трехфазные мгновенные значения потокосцеплений в воздушном зазоре а, b в составляющие потока  ,
,  осях , ортогональной системы координат, связанной с неподвижным статором двигателя, причем ось совме-
осях , ортогональной системы координат, связанной с неподвижным статором двигателя, причем ось совме-
щается с магнитной осью статорной обмотки фазы А. Указанные составляющие определяются следующими выражениями:
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
1 |
|
|
. |
(113) |
|||
|
|
|
Ψμ |
|
|
Ψμа , |
Ψμ |
|
2 |
Ψμа |
Ψμb |
||||||||||
|
|
|
2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||
|
|
Кроме того, в ДП осуществляется вычисление состав- |
|||||||||||||||||||
ляющих потокосцепления ротора |
2 , |
|
|
2 |
согласно выраже- |
||||||||||||||||
ниям |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ψ |
|
|
L2 |
Ψ |
|
(L |
L )I |
, Ψ |
|
|
L2 |
Ψ |
|
(L |
L )I . (114) |
||||||
2α |
|
|
μ |
2 |
|
μ |
|||||||||||||||
|
|
L12 |
2 |
12 1 |
|
|
L12 |
|
2 |
|
12 1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Датчик тока измеряет мгновенные значения фазных токов статора I1а, I1b и аналогично датчику потока преобразует их в двухфазную систему переменных I1 , I1 .
Преобразование переменных АД, приведенных в неподвижной системе координат , , в переменные системы координат х, у, связанной с потокосцеплением ротора и вращающейся со скоростью 0эл, осуществляется векторфильтром ВФ и координатным преобразователем КП1. Век- тор-фильтр выделяет модуль вектора потокосцепления ротора
|
Ψ2 |
|
2 |
2 |
(115) |
|
|
||||
|
|
2 |
2 |
||
и тригонометрические функции |
|
|
|||
cos 0эл = 2 /| |
2|, sin |
0эл = 2 /| 2|, |
(116) |
||
где 0эл – электрический угол поворота ротора относительно статора в осях х, у ( 0эл = 0эл t).
85

Преобразователь КП2 осуществляет поворот вектора намагничивающей силы статора на угол 0эл в соответствии с выражениями (93), в которые входят составляющие тока статора I1х, I1у по осям х, у вращающейся системы координат.
Поскольку вектор потокосцепления ротора в системе координат х, у совмещен с осью х, т.е. | 2| = 2х, 2у = 0, то составляющая тока I1х определяет магнитный поток двигателя, что по аналогии с двигателем постоянного тока сравнимо с действием тока в цепи его обмотки возбуждения. При этом составляющая тока I1у подобно току в якорной цепи ДПТ определяет электромагнитный момент двигателя.
Задание на электромагнитный момент двигателя формируется выходным сигналом регулятора скорости PC, на входе которого сравниваются сигнал задания скорости ЗИ с выхода ЗИ и сигнал, пропорциональный текущей скорости  двигателя. Ограничение выходного сигнала PC обеспечивает ограничение задания максимального значения электромагнитного момента АД. Для поддержания постоянства электромагнитного момента при изменениях модуля потокосцепления ротора введен в соответствии с выражением (111) блок деления (БД) сигнала с выхода регулятора скорости на | 2|. На выходе блока деления формируется сигнал задания I1уз составляющей тока статора по оси у (I1у).
двигателя. Ограничение выходного сигнала PC обеспечивает ограничение задания максимального значения электромагнитного момента АД. Для поддержания постоянства электромагнитного момента при изменениях модуля потокосцепления ротора введен в соответствии с выражением (111) блок деления (БД) сигнала с выхода регулятора скорости на | 2|. На выходе блока деления формируется сигнал задания I1уз составляющей тока статора по оси у (I1у).
Сигнал задания I1хз составляющей тока статора по оси х (I1х) формируется на выходе регулятора потока РП, на входе которого сравниваются сигнал задания и реальное значение модуля потокосцепления ротора.
Сигналы задания I1хз и I1yз сравниваются с текущими составляющими токов статора I1х и I1y на входах регуляторов тока соответственно РТх и PTy, выходные сигналы которых определяют задания составляющих напряжений статора U1хз и U1yз в системе координат х, у.
Если в системе дифференциальных уравнений (109) выполнить компенсацию составляющих E1x и E1y, то без их учета подобно электроприводам постоянного тока
86
U1x(р) = R1э(1 + Т1э р)I1х(р),
(117)
U1y(р) = R1э(1 + T1э p)I1y(p).
На рис. 26 роль указанной компенсации выполняет блок БК, в который вводятся переменные I1х, I1у, | 2|, 0эл, и где производятся необходимые функциональные преобразования.
Преобразование составляющих напряжения статора U1x U1y c выхода БК в составляющие U1 , U1 в осях , осуществляется блоком координатных преобразований КП1 в соответствии с выражениями
в осях , осуществляется блоком координатных преобразований КП1 в соответствии с выражениями
|
|
U1 |
|
= U1x cos |
|
0эл – U1y sin |
|
0эл, |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(118) |
|
|
U1 |
|
= U1x sin |
0эл + U1y cos |
|
0эл. |
||||||||||||||||||
В преобразователе фаз ПФ в соответствии с выраже- |
|||||||||||||||||||||||||
ниями [9] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
2 |
U , |
U |
|
|
|
1 |
|
|
|
|
1 |
|
U |
|
U , |
|||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
1а |
|
|
1 |
|
|
1b |
2 |
|
|
3 |
|
1 |
1 |
|||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
(119) |
|||
|
|
|
U |
|
|
|
|
|
|
U |
|
U |
|
|
|||||||||||
|
|
|
1c |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
2 |
|
|
3 |
|
1 |
|
|
|
1 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
формируются трехфазные синусоидальные сигналы U1a, U1b, U1c, определяющие на выходе преобразователя частоты амплитуду и частоту напряжений UA, UВ, UС питания обмоток
статора двигателя.
Построим структурную схему системы регулирования скорости АД при ориентации координат х, у по вектору потокосцепления ротора.
Динамические свойства преобразователя частоты совместно с блоками измерения и преобразования координат учитываются введением в каждый канал структурной схемы эквивалентных инерционных звеньев с передаточными функциями по напряжению:
Wп1(p) = U1x(p) / U1xз(p) = kп1(Tп р + 1),
(120)
Wп2(p) = U1y(p) /U1yз(p) = kп2(Tп р + 1),
87

где kп1, kп2 – эквивалентные статические коэффициенты передачи между составляющими в осях х, у напряжений U1xз, U1yз управления преобразователем и составляющими выходных напряжений преобразователя U1х, U1y;
Tп – эквивалентная постоянная времени цепи управления преобразователем.
Тогда передаточные функции между составляющими
напряжений U1хз, U1yз и токов I1х, I1у статора |
|
|
|
|||||||
|
|
I |
( р) |
|
|
kп1 / R1э |
|
|
|
|
Wпх |
( р) |
1х |
|
|
|
|
|
|
, |
|
U1хз |
( р) |
|
(Tп p |
1)(T1э p |
1) |
|||||
|
|
|
(121) |
|||||||
|
|
I1у ( р) |
|
|
kп2 / R1э |
|
||||
Wпу |
( р) |
|
|
|
|
, |
||||
U1уз |
( р) |
|
(Tп p |
1)(T1э p |
1) |
|
||||
|
|
|
|
|
||||||
Обобщенная линеаризованная структурная схема электропривода, показанного на рис. 26, с учетом выражений (110) (112), (121) приведена на рис. 27. Схема содержит два внутренних контура регулирования составляющих I1х, I1у тока статора с коэффициентами обратной связи по току kо.т1, kо.т2, внешний контур регулирования потокосцепления ротора с коэффициентом обратной связи по потокосцеплению kо.пт и внешний контур регулирования скорости двигателя с коэффициентом обратной связи по скорости kо.с [10].
Данная схема подобна структурной схеме системы двухзонного регулирования скорости двигателя постоянного тока. Поэтому при настройке контуров регулирования на модульный оптимум определение параметров передаточных функций регуляторов тока Wр.т1(p), Wр.т2(p), потокосцепления Wр.пт(p) и скорости Wр.с (р) выполняется аналогично.
Расчет параметров регуляторов при векторном управлении асинхронным двигателем
Определим динамические параметры исследуемой системы управления [10]. Для расчета динамических параметров, найдем рабочую частоту при том же напряжении, на выходе преобразователя частоты.
88
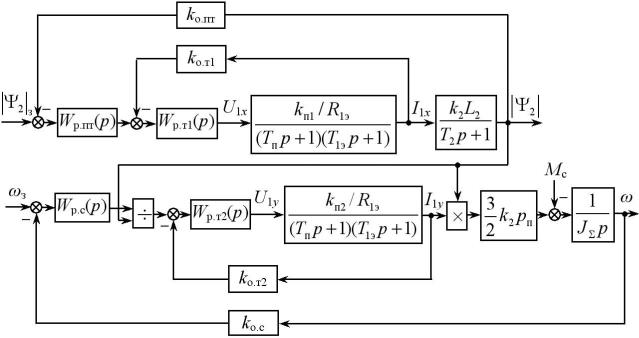
89
Рис. 27. Структурная схема системы регулирования скорости АД при ориентации координат х, у по вектору потокосцепления ротора

Исходные данные:
потокосцепление ротора 2 = 0,87 Вб;
номинальный момент двигателя Мн = 48,6 Η·м; статический момент двигателя Мс= 5,95 Н·м; скорость двигателя ω = 45,6 рад/с; номинальное скольжение двигателя, sн = 0,09; число пар полюсов рп = 6;
активное сопротивление обмотки статора R1 = 1,32 Ом; приведенное активное сопротивление обмотки ротора
R2' = 4,22 Ом;
индуктивное сопротивление намагничивания хм = 26 Ом; индуктивное сопротивление обмотки статора х1 = 3,08
Ом;
приведенное индуктивное сопротивление обмотки ротора х 2' = 1,66 Ом;
постоянная времени преобразователя Tп = 0,007; суммарный момент инерции на валу двигателя
J 0,577.
Расчет параметров исследуемой системы управления осуществляется в следующем порядке.
1. Скольжение на искусственной механической характеристике двигателя
sи |
М с sн |
|
5,95 0,09 |
0,01102. |
|
М н |
48,6 |
||||
|
|
||||
2. Частота вращения поля статора для искусственной механической характеристики двигателя и рабочая частота преобразователя
|
|
|
|
|
|
|
|
|
|
45,6 |
|
46,108 |
рад |
. |
|
о.и |
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
sи |
1 |
|
0,01102 |
|
с |
|||||||
|
|
|
|
|||||||||||
f |
|
pп |
о.и |
6 |
46,108 |
44,03 Гц. |
||||||||
|
2 |
|
|
|
|
|
2 |
3,14 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
3. Взаимная индуктивность
90