

2854
.pdf
|
h1 |
|
h1 |
qj 1 – qj 0 |
|
||||||||
Mj 0 |
|
|
|
+ Mj 1 |
|
|
= |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|||||||
3 |
|
|
6 |
|
|
|
h1 |
(62) |
|||||
|
|
hm |
|
|
h m |
qj , m – 1 –qj m |
|||||||
|
|
|
|
|
|||||||||
Mj , m – 1 |
|
+ Mj m |
|
|
= |
|
|
|
. |
||||
|
|
|
|
|
|
||||||||
6 |
|
|
3 |
|
|
h m |
|
||||||
Из выражений (61), (62) следует система линейных алгебраических уравнений с трехдиагональной матрицей:
2 |
0 |
0..... |
0 |
0 |
0 |
M j 0 |
d j 0 |
|
1 |
2 |
1.... |
0 |
0 |
0 |
M j1 |
d j1 |
|
..... ..... ......... ..... ..... ..... |
..... |
..... |
, (63) |
|||||
0 |
0 |
0..... |
m 1 |
2 |
m 1 |
M j, m 1 |
d j, m |
1 |
0 |
0 |
0..... |
0 |
m |
2 |
M j m |
d j m |
|
где 0 = m =1, |
s =hs / (h s +hs + 1 ), |
s =1 – |
s , |
|
||
dj 0 =6(qj 1 –qj 0 )/h1 |
2 , |
dj m =6(qj , m - 1 – qj m )/h m |
2 , |
(64) |
||
dj s =6[(qj , s + 1 – qj s )/hs + 1 – (qj s –qj , s - 1 )/hs ]/(hs +hs + 1 ).
Для решения системы уравнений (63) используют метод прогонки [1] [4]. Согласно этому методу сначала по рекуррентным формулам находятся значения вспомогательных коэффициентов es, bj s :
es = – s / ( s es – 1 +2), bj s =(dj s – s bj , s – 1 )/ ( s es – 1 +2), |
|
|
e-1 = 0, bj,-1 = 0, |
s = 0, 1, ... , m. |
(65) |
|
||
Затем по найденным коэффициентам es , bj s последовательно определяются значения параметров Mj m , Mj , m - 1 ,...,
Mj 0 :
Mj m = bj m , Mj s = es Mj , s + 1 +bj s , s = m–1, ... , 0. (66)
После определения всех параметров Mj s из системы уравнений (63) сплайн Pj , s 3 (t) может быть вычислен в любой точке траектории. Практически выдача задающих воздействий на исполнительные приводы происходит через определенные моменты времени, называемые периодами дискретности Тд.
41

ПРЕДВАРИТЕЛЬНОЕ ЗАДАНИЕ
1.Ознакомиться с теоретическими сведениями и текстом управляющей программы.
2.Проверить соответствие выражения (57) условиям непрерывности и приближения к заданной функции.
3.Получить выражения для определения скорости изменения кубического сплайна на s-ом и s +1-ом интервалах времени.
4.Разработать блок-схему алгоритма управления многокоординатным электроприводом.
РАБОЧЕЕ ЗАДАНИЕ
1.Запустить программу управления Robot.exe.
2.Ввести заданные значения координат в опорных точках в соответствии с табл. 10.
Таблица 10
m |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
9 |
10 |
q, |
|
|
|
|
|
|
|
|
|
|
|
|
рад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q1 |
2,8 |
2,4 |
2,0 |
2,4 |
2,8 |
3,2 |
3,5 |
3,8 |
3,4 |
|
3,0 |
2,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
q2 |
1,4 |
1,2 |
1,0 |
0,8 |
0,6 |
0,4 |
0,6 |
0,8 |
1,0 |
|
1,2 |
1,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
q3 |
2,5 |
2,7 |
2,9 |
3,1 |
2,9 |
2,7 |
2,5 |
2,3 |
2,1 |
|
2,3 |
2,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1m= 1 рад/с; |
2m= 1 рад/с; |
3m= 1 рад/с |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3.Сформировать требуемые траектории движения трех координат, последовательно нажимая на кнопки 2 коорд., 3 коорд., 1 коорд.
4.Включить автомат на лицевой панели блока управления следящими электроприводами.
5.Запустить заданную программу движения, нажав кнопку 1 коорд.
42

6.Получить временные диаграммы заданных и фактических перемещений координат.
7.Снять временные диаграммы скоростей координат.
8.Выключить автомат на лицевой панели блока управления следящими электроприводами.
9.Закрыть программу управления Robot.exe.
10.Составить отчет по работе.
СОДЕРЖАНИЕ ОТЧЕТА
1.Цель работы.
2.Рабочее задание.
3.Схема алгоритма интерполяции задающих сигналов.
4.Временные диаграммы изменения перемещений и скоростей, снятые в соответствии с рабочим заданием.
5.Анализ результатов и выводы.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Дать определение и пояснить назначение сплайна порядка .
2.Какие преимущества имеет интерполяция траектории кубическими сплайнами?
3.Какие существуют ограничения на параметры движения вдоль заданной траектории?
4.Пояснить смысл всех величин, входящих в выражение для кубического сплайна.
5.Показать, что выражение (57) удовлетворяет условиям непрерывности сплайн-функции и приближения.
6.Получить выражения для определения скорости изменения кубического сплайна на s-ом и s+1-ом интервалах времени.
7.Получить систему алгебраических уравнений для определения параметров кубических сплайнов.
8.Применение метода прогонки для определения параметров кубического сплайна.
9.Описать блок-схему алгоритма управления.
43
ЛАБОРАТОРНАЯ РАБОТА № 4
ИССЛЕДОВАНИЕ ЭЛЕКТРОПРИВОДА С ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ
Цель работы: Изучение теоретических сведений об особенностях и структуре управления синхронным двигателем в схеме вентильного двигателя. Исследование двухконтурного электропривода с вентильным двигателем.
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Особенности управления синхронным двигателем в схеме вентильного двигателя
Синхронные двигатели большой мощности находят достаточно широкое применение в нерегулируемых электроприводах с длительным режимом работы благодаря своим хорошим энергетическим показателям и, в первую очередь, высокому коэффициенту мощности. При необходимости регулирования скорости синхронного двигателя может быть применен, как и для асинхронных двигателей, управляемый преобразователь частоты [7], [9].
Наряду с традиционным частотным управлением, когда двигатель получает питание от инвертора с независимым заданием частоты, находит широкое применение управление, зависимое от вращения ротора, когда частота выходного напряжения (или тока) инвертора задается частотой вращения ротора с помощью датчика положения ротора. Синхронный двигатель с таким инвертором представляет собой обращенный двигатель постоянного тока, в котором неподвижный статор является якорем, а вращающийся ротор – источником магнитного поля.
Двигатель при данной схеме включения называется вентильным двигателем (ВД) [7]. Синхронные двигатели малой мощности с сильными постоянными магнитами используются преимущественно в регулируемом электроприводе по схеме ВД. По сравнению с коллекторными двигателями по-
44
стоянного тока они обладают лучшими динамическими, габаритными и стоимостными показателями.
Простота управления двигателем постоянного тока обусловливала до недавнего времени его преимущественное применение в регулируемом электроприводе. Слабым звеном в этом приводе является сам двигатель, дорогой в изготовлении из-за сложности коллектора и потребности в дефицитном материале – меди, обладающий повышенной инерционностью и ограниченной перегрузочной способностью. Лучшие динамические и стоимостные показатели имеют асинхронные и синхронные двигатели, а также двигатели индукторного и вентильно-индукторного типов. Если этим двигателям с помощью управляемых полупроводниковых средств придаются свойства бесколлекторного двигателя постоянного тока, то используются простые структуры управления электропривода постоянного тока, обеспечивающие высокие регулировочные свойства и динамические показатели.
Рассмотрим один из вариантов бесколлекторного двигателя постоянного тока – вентильный двигатель, выполненный на основе трехфазной синхронной машины с постоянным магнитом (рис. 11). Обмотки статора получают питание от источника постоянного тока через мостовой коммутатор с шестью управляемыми полупроводниковыми ключами К1 К6. Нумерация ключей соответствует очередности их коммутации с угловым интервалом 60 электрических градусов (эл. град.). Ключи управляются выходными сигналами v1 v6 распределителя импульсов (РИ).
Направление коммутации – прямое (правое) вращение (ПВ) или обратное (левое) вращение (ЛВ) – определяется выходными сигналами узла направления вращения (УНВ) в зависимости от знака входного управляющего воздействия иу. За один цикл коммутатора вектор намагничивающей силы статора (НС), пропорциональной произведению тока I на число
витков w фазы (F  3Iw) , делает один оборот на 360 электрических градусов.
3Iw) , делает один оборот на 360 электрических градусов.
45

Рис. 11. Схема включения вентильного двигателя
Диодный мост с обратной относительно напряжения питания полярностью создает контуры для спадания тока в обмотке при отключении соответствующего ей ключа.
Если при отключенном датчике положения ротора (ДПР) подавать через РИ в функции времени с некоторой неизменной частотой f управляющие импульсы, то коммутатор работает как инвертор преобразователя частоты и двигатель вращается с неизменной частотой вращения 2 f. При этом наблюдаются пульсации скорости из-за дискретного характера вращения НС по сравнению с вариантом питания двигателя от трехфазной сети переменного тока. При низкой частоте двигатель входит в шаговый режим, когда пульсации скорости имеют паузы с нулевым значением.
При включенном ДПР коммутация фазовых обмоток синхронного двигателя при вращении ротора аналогична коммутации коллектором секций якоря двигателя постоянного то-
46

ка. В вентильном двигателе функцию коллектора выполняет коммутатор, а функцию щеток – ДПР. В отличие от двигателя постоянного тока в вентильном двигателе якорь и коллектор (статор и коммутатор) неподвижны, а щетки (ДПР) и магниты, расположенные на роторе, вращаются. Мостовой трехфазный коммутатор осуществляет шесть коммутаций за один электрический оборот (360 электрических градусов), т.е. аналогичен коллектору с шестью пластинами двигателя постоянного тока. Для получения максимального среднего момента ВД с шестью тактами в оборотном цикле устанавливают ДПР на роторе так, чтобы начальный угол рассогласования между НС статора и
ротора (угол включения) |
нач = ( – )нач на каждом такте рав- |
|
нялся 2 /3, а конечный угол (угол отключения) кон = ( – |
)кон |
|
равнялся /3. |
|
|
При этом ср = ( |
нач + кон)/2 = /2. Процесс коммута- |
|
ции ключей с изменением угла рассогласования от 2 /3 до |
/3 |
|
проиллюстрирован на рис. 12. |
|
|
Рис. 12. Угловая характеристика вентильного двигателя в функции разности углов намагничивающей силы статора ( ) и положения ротора ( )
47

Среднее значение момента при синусоидальной угловой характеристике неявнополюсного двигателя
|
|
1 |
2π / 3 |
3 |
|
|
3 |
|
|
M |
|
M m sin d |
M m cos |
2π / 3 |
M m . |
(67) |
|||
ср |
π / 3 |
π |
π / 3 |
π |
|||||
|
|
π / 3 |
|
|
|
|
К основным узлам системы управления ВД относятся: датчик положения ротора; распределитель импульсов; узел направления вращения; коммутатор, который работает как инвертор тока или инвертор напряжения в зависимости от источника питания.
Датчик положения ротора (ДПР) может быть оптиче-
ским, индукционным, электромагнитным. Рассмотрим вариант оптического ДПР (рис. 13). На неподвижном кольцевом статоре ДПР расположены друг против дуга попарно светодиоды и фотодиоды: СД A – ФД A, СД В – ФД В, СД С – ФД С. Пары смещены по окружности друг относительно друга на углы 120°/рп, где рп – число пар полюсов двигателя.
На рис. 13 изображен двухполюсный вариант ДПР.
Рис. 13. Конструктивная схема оптического датчика положения ротора
Статор ДПР сочленен со статором двигателя так, что расположение трех пар из светодиодов и фотодиодов соответствует расположению обмоток фаз А, В, С двигателя. Ротор
48

ДПР – сплошной, в целом непрозрачный диск, имеющий лишь прозрачную сегментную щель, которая занимает по окружности диска угол 180°/рп. Ротор ДПР сочленяется с ротором двигателя так, чтобы осевая полюсная линия диска составляла с осевой линией магнита ротора двигателя угол 120°.
Тогда при = 0 для правого вращения активизируется ФД А, нач = 120°, кон = 60° и Мср максимален. Такая установка ротора ДПР соответствует расположению щеток у двигателя постоянного тока на геометрической нейтрали. При вращении ротора фотодиоды поочередно засвечиваются светодиодами и их усиленные и сформированные соответствующими блоками сигналы иа, иb, ис выделяются на выходе ДПР. Сигналы иа, иb, ис образуют трехфазную систему с угловой продолжительностью включения каждого сигнала 180° на оборот ДПР (рис. 14).
Рис. 14. Выходные сигналы датчика положения ротора
Распределитель импульсов (РИ) вырабатывает управ-
ляющие импульсы и распределяет их по ключам коммутатора. На вход РИ поступают сигналы ДПР иа, иb, ис, из которых логическим способом формируются открывающие сигналы (с продолжительностью включения 120°) для ключей
нечетной (анодной) группы
uк1 ua |
|
b , uк3 ub |
|
c , uк5 uc |
|
a , |
(68) |
u |
u |
u |
и четной (катодной) группы
uк4 |
|
aub , uк6 |
|
buc , uк2 |
|
cua . |
(69) |
u |
u |
u |
49
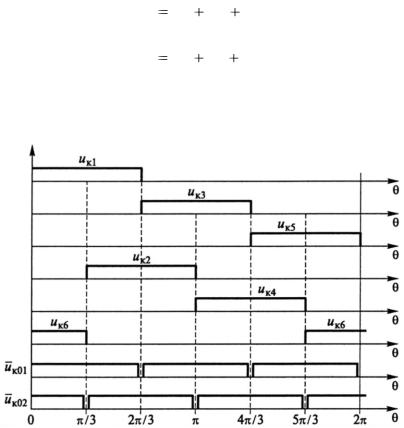
Из сигналов uкi формируются два дополнительных сигнала: для запирания ключей нечетной группы
|
|
|
к01 |
uк1 |
uк3 |
uк5 |
(70) |
|
u |
||||||||
и четной группы |
|
|
|
|
||||
|
|
к02 |
uк2 |
uк4 |
uк6 . |
(71) |
||
u |
||||||||
Диаграмма сформированных распределителем импульсов управляющих сигналов для правого вращения приведена на рис. 15.
Рис. 15. Диаграмма сигналов распределителя импульсов
Порядок следования импульсов, коммутирующих ключи, задается одним из двух сигналов – правого (ПВ) или левого (ЛB) вращения, поступающих на вход РИ от УНВ. Для смены направления вращения двигателя требуется изменить направление вектора намагничивающей силы статора на 180°. Для этого в ранее включенной паре ключей нечетный ключ нужно отключить и включить четный ключ той же фазы, а для другой фазы отключить четный ключ и включить нечетный.
50