

2854
.pdfПД – приводной двигатель; Г – обмотка якоря генератора;
ДПГ – добавочный полюс генератора; КОГ – компенсационная обмотка генератора; ОВД – обмотка возбуждения двигателя; Д – обмотка якоря двигателя; ДПД – добавочный полюс двигателя;
КОД – компенсационная обмотка двигателя; ИМ – исполнительный механизм.
Структурная схема контура тока приведена в [10] и представлена на рис. 20.
|
|
|
|
|
|
|
|
|
|
|
|
|
ед |
|||||
из.т |
|
иу |
|
|
kв |
|
ив |
|
kг |
|
ег – |
|
1/ Rя |
|
iя |
|||
WPT (p) |
||||||||||||||||||
– |
|
|
Тв |
р 1 |
|
|
Тг р 1 |
|
|
Тя р 1 |
|
|||||||
|
|
|
|
|
|
|
|
|||||||||||
|
||||||||||||||||||
uо.т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
kо.т |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 20
На рис. 20 приняты обозначения: из.т – сигнал задания тока; ио.т – сигнал обратной связи по току;
WPT (p) – передаточная функция регулятора тока;
uу – напряжение управления на входе тиристорного возбудителя;
kв, Тв – коэффициент усиления и постоянная времени тиристорного возбудителя;
uв – напряжение, поступающее с выхода тиристорного возбудителя на обмотку возбуждения генератора;
kг, Тг – коэффициент усиления и постоянная времени генератора;
ег – ЭДС генератора; ед – противоЭДС, наводимая в обмотке якоря двигателя;
Rя – суммарное сопротивление последовательно соединенных в соответствии с рис. 20 обмоток генератора и двигателя;
– суммарное сопротивление последовательно соединенных в соответствии с рис. 20 обмоток генератора и двигателя;
61
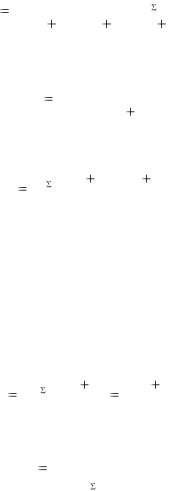
Tя – постоянная времени последовательно соединенных обмоток генератора и двигателя;
– постоянная времени последовательно соединенных обмоток генератора и двигателя;
iя – ток в обмотке якоря двигателя;
kо.т – коэффициент обратной связи по току. Передаточная функция разомкнутого контура тока в
соответствии с рис. 20 имеет вид:
Wк.т |
( р) |
|
WРТ ( р)kв kг kо.т |
/ Rя |
, |
(82) |
||||
(Тв |
р 1)(Тг р 1)(Тя р 1) |
|||||||||
|
|
|
|
|||||||
Желаемая передаточная функция разомкнутого контура |
||||||||||
тока при настройке на модульный оптимум |
|
|
||||||||
|
Wжел.к.т ( р) |
|
1 |
|
, |
|
(83) |
|||
|
|
|
|
|
||||||
|
2Тμ |
р(Тμ р |
1) |
|
||||||
|
|
|
|
|
|
|
||||
Приравняв правые части уравнений (82), (83) и положив Т = Тв, получим передаточную функцию регулятора тока
= Тв, получим передаточную функцию регулятора тока
WР Т |
( р) |
Rя (Т |
г |
р 1)(Т я |
р 1) |
, |
(84) |
|
2Т |
μ р kв kг kо.т |
|||||||
|
|
|
|
|||||
Полученная передаточная функция соответствует ПИДрегулятору. Вследствие того, что постоянная времени якоря двигателя Тя значительно меньше постоянной времени генератора Тг, можно отказаться от компенсации постоянной времени Тя, положив Т = Тв + Тя.
= Тв + Тя.
Передаточная функция регулятора тока при этом упрощается и имеет тот же вид, что и для системы ТП-Д, т.е. она соответствует ПИ-регулятору.
WРТ |
( р) |
Rя (Тг р 1) |
|
Тг |
р 1 |
, |
(85) |
|||
2Тμ |
р kв kг kо.т |
|
Т |
и р |
|
|||||
|
|
|
|
|
||||||
Постоянная времени интегрирования ПИ-регулятора тока
Ти |
2Тμ kвkг kо.т |
. |
(86) |
|
Rя |
||||
|
|
|
Передаточная функция замкнутого контура тока при настройке на модульный оптимум имеет вид:
62

Wзам.к.т |
( р) |
|
1/ kо.т |
|
. |
(87) |
2Тμ |
р(Тμ р 1) |
|
||||
|
|
1 |
|
|||
Структурная схема контура ЭДС приведена в [10] и представлена на рис. 21.
из.э |
|
из.т |
|
|
|
|
iя – |
Iс |
|
|
|
|
|
ед |
|||
|
|
1/ kо.т |
|
|
|
|
|
|
R |
|
|
||||||
WPЭ(p) |
|
|
|
|
|
|
см |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
|
|
|
2Тμ р(Тμ р 1) 1 |
|
|
|
|
|
|
|
|
|
|
||
– |
|
|
|
|
|
|
|
|
смТм р |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|||||||||||
uо.э |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kо.э |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТФ р |
1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 21
На рис. 21 дополнительно приняты обозначения: из.э – сигнал задания ЭДС; ио.э – сигнал обратной связи по ЭДС;
WPЭ (p) – передаточная функция регулятора ЭДС; Iс – статический ток;
см – коэффициент пропорциональности по моменту; Тм – электромеханическая постоянная времени;
– угловая скорость двигателя;
kо.э – коэффициент обратной связи по ЭДС двигателя; TФ – постоянная времени фильтра в датчике ЭДС. Передаточная функция разомкнутого контура ЭДС в
соответствии с рис. 21 при пренебрежении постоянной времени TФ и малой величиной 2Т 2р2 определяется из уравнения:
W |
( р) |
WРЭ( p)Rя смkо.э / kо.т |
|
|
WРЭ( p)Rя kо.э / kо.т |
. |
(88) |
|||
|
|
|
|
|
|
|||||
к.э |
|
[2Тμ р(Тμ р 1) 1]смТм р |
|
(2Тμ р 1)Тм р |
|
|||||
|
|
|
|
|||||||
Желаемая передаточная функция разомкнутого контура |
||||||||||
ЭДС при настройке на модульный оптимум |
|
|||||||||
|
|
Wжел.к.э ( р) |
|
1 |
|
|
, |
|
(89) |
|
|
|
|
|
|
|
|
||||
|
|
2Тμэ |
р(Тμэ |
|
|
|||||
|
|
|
р 1) |
|
||||||
63

где Т э = 2Т + ТФ |
2Т . |
|
|
|
|
|
|
|
|
|
Приравняв правые части уравнений (88), (89), получим |
||||||||||
передаточную функцию регулятора ЭДС |
|
|
|
|
||||||
|
WРЭ |
( р) |
kо.тТм р(2Тμ |
р 1) |
. |
|
(90) |
|||
|
|
|
|
|
|
|
||||
|
2Тμэ р(Тμэ р 1)kо.э Rя |
|
||||||||
|
|
|
|
|
|
|||||
Принимая Т э = 2Т , получаем передаточную функцию |
||||||||||
П-регулятора ЭДС |
|
|
|
|
|
|
|
|
|
|
|
kо.тТм р(2Тμ р 1) |
|
k |
Т |
|
|
|
|||
WРЭ ( р) |
|
|
|
|
|
|
о.т м |
kРЭ. |
(91) |
|
4Тμ |
р(2Тμ р 1)kо.э Rя |
|
4Тμ kо.э Rя |
|||||||
|
|
|
|
|||||||
Расчёт параметров системы ТВ-Г-Д для электропривода напора экскаватора
Вначале произведём расчёт номинальных значений параметров электродвигателя [10]. Значения номинальной частоты вращения nном, номинальной мощности Рном, номинального тока Iя.ном, номинального напряжения Uном и числа пар полюсов рп возьмём из паспортных данных двигателя: nном = 750
об/мин; Рном = 200 кВт, Iя.ном = 585 А, Uном = 370 В, рп = 2.
Выразим угловую номинальную скорость двигателя:
ном = 2 nном / 60 = 2 3,14 750 / 60 = 78,54 рад / с.
Рассчитаем номинальный момент электродвигателя:
Мном = Рном / ном = 200000 / 78,54 = 2546,5 Н м.
Постоянную см найдём следующем образом:
см = Мном / I я.ном = 2546,5 / 585 = 4,353 Н м / А.
Номинальная ЭДС двигателя
Еном = см ном = 4,353 78,54 = 341,88 В.
Индуктивность обмотки якоря двигателя
Lя |
Uном |
|
0,25 370 |
0,00101 Гн, |
||
рп ном |
Iя.ном |
2 78,54 585 |
||||
|
|
|||||
64

где = 0,25 при наличии компенсационной обмотки. Произведём также расчёт номинальных значений пара-
метров генератора типа ГПЭ - 220 - 1000 У2 [10]. Значения номинальной частоты вращения nг.ном, номинального тока Iг.ном, номинального напряжения Uг.ном и числа пар полюсов рпг возьмём из паспортных данных генератора: nг.ном = 1000
об/мин, Iг.ном = 579 A, Uг.ном = 380 В, рпг = 2.
Зная паспортные данные генератора, найдем следующие параметры.
Угловая номинальная скорость генератора
г.ном = 2 n г.ном / 60 = 2 3,14 1000 / 60 = 104,72 рад / с.
Индуктивность обмотки якоря генератора
Lг |
Uг.ном |
|
0,25 380 |
0,00078 Гн. |
||
рпг г.ном |
Iг.ном |
2 104,72 579 |
||||
|
|
|||||
Суммарная индуктивность обмоток якоря генератора и двигателя
Lя = Lя + Lг = 0,00101 + 0,00078 = 0,00179 Гн.
= Lя + Lг = 0,00101 + 0,00078 = 0,00179 Гн.
Значения активных сопротивлений якоря генератора Rяг, дополнительных полюсов генератора RДПг, якоря двигателя Rяд, и дополнительных полюсов двигателя RДПд при температуре 15 С возьмём из паспортных данных генератора и дви-
гателя: Rяг = 0,0128 Ом; RДПг = 0,0047 Ом; Rяд = 0,013 Ом; RДПд = 0,00525 Ом.
Рассчитаем суммарное активное сопротивление последовательной цепи обмоток генератора и двигателя, приведенной на рис. 19, при температуре 15 С:
Rя 15 = Rяг + RДПг + Rяд+ RДПд = 0,0128 + 0,0047 + + 0,013 + 0,00525 = 0,03575 Ом.
Активное сопротивление цепи генератор – двигатель при температуре 75 С
65

R я 75 = 1,1 R я 15 [1 + (75 – 15)] =
R я 15 [1 + (75 – 15)] =
= 1,1  0,03575
0,03575  [1 + 0,004
[1 + 0,004  (75 –15)] = 0,04876 Ом,
(75 –15)] = 0,04876 Ом,
где = 0,004 – температурный коэффициент сопротивления меди;
1,1 – коэффициент, учитывающий сопротивление соединительных проводов.
Суммарная постоянная времени обмоток якорей генератора и двигателя
Тя = Lя
= Lя /Rгд75 = 0,00179 / 0,04876 = 0,0367 с.
/Rгд75 = 0,00179 / 0,04876 = 0,0367 с.
Номинальное напряжение на выходе тиристорного воз-
будителя Uв.ном = 220 В, напряжение управления Uy.ном = 10 В. Постоянная времени тиристорного возбудителя Тв = 0,125 с.
Коэффициент усиления тиристорного возбудителя kв= Uв.ном / Uу.ном = 220/10 = 22.
Коэффициент усиления генератора: kг = Uг.ном / Uв.ном = 380/220 = 1,7273.
Постоянную времени генератора Тг принимаем равной
0,52 с.
Активное сопротивление двигателя при температуре
15 С
Rд15 = Rяд+ RДПд = 0,013 + 0,00525 = 0,01825 Ом.
Активное сопротивление двигателя при температуре
75 С
Rд75 = 1,1 Rд15 [1 + (75 – 15)] =
Rд15 [1 + (75 – 15)] =
= 1,1  0,01825
0,01825  [l + 0,004 (75 – 15)] = 0,0249 Ом.
[l + 0,004 (75 – 15)] = 0,0249 Ом.
Рассчитаем момент инерции механизма J2 (исполнительного органа рабочей машины), зная моменты инерции рукояти
Jр = 0,41 кг м2, ковша Jк = 0,45 кг м2 и породы Jпор = 0,56 кг м2, определенные из нагрузочных и скоростных характеристик.
J2 = Jмех = Jр + Jк + Jпор = 0,41 + 0,45 + 0,56 = 1,42 кг м2.
66

Суммарный момент инерции двигателя и механизма
J = J1+ J2 = 15 + 1,42 = 16,42 кг
= J1+ J2 = 15 + 1,42 = 16,42 кг  м2,
м2,
где J1 = 15 кг м2 – момент инерции двигателя.
Напряжение управления тиристорным возбудителем при номинальном напряжении на двигателе
Uу = Uном /kв kг = 370/(22 1, 7273) = 9,7367 В.
Определим коэффициенты обратной связи по току, ЭДС и постоянные времени. При этом учитываем, что максимальный ток якоря двигателя Iя.max = 1500 A.
Коэффициент обратной связи по току
kо.т = Uу.ном / Iя.max = 10 /1500 = 0,006667 В.
Коэффициент обратной связи по ЭДС
kо.э = UДЭном / Uном = 10 / 370 = 0,02703.
Малая некомпенсируемая постоянная времени
Т = Тв + Тя = 0,125 + 0,0367 = 0,1617 с.
= Тв + Тя = 0,125 + 0,0367 = 0,1617 с.
Постоянная времени интегрирования ПИ-регулятора
тока
Т |
|
2Тμ kвkг kо.т |
|
2 0,1617 22 1,7273 0,006667 |
1,6803 с. |
и |
Rя |
0,04876 |
|||
|
|
|
|||
Электромеханическая постоянная времени
Тм = J R я / (См)2 = 16,42 0,04876 /4,3532 = 0,04225 с.
R я / (См)2 = 16,42 0,04876 /4,3532 = 0,04225 с.
ПРЕДВАРИТЕЛЬНОЕ ЗАДАНИЕ
1.Изучить структуру системы тиристорный возбудитель
–генератор – двигатель.
2.Получить выражения для синтеза регуляторов тока и ЭДС в системе ТВ-Г-Д.
3.Произвести расчет параметров системы ТВ-Г-Д для электропривода напора экскаватора.
67

РАБОЧЕЕ ЗАДАНИЕ
1.Создать модель системы ТВ-Г-Д для снятия переходных процессов и механических характеристик электропривода напора экскаватора [10], приведенную на рис. 22, используя блоки библиотеки Simulink.
2.Установить в модели значения коэффициента передачи регулятора ЭДС Кре = 5,14, коэффициента обратной связи по току Кot = 0,006667 и постоянной Сm = 4,353. Конечное значение момента Мс установить равным 2546,5, время наброса нагрузки – 0,25 с. Время окончания моделирования – 25 с.
3.В блоке Saturation установить верхний предел 10; установить нижний предел -10.
4.Установив значение сигнала задания ЭДС Uzе = 10 В, получить переходные процессы изменения сигналов на выходах регуляторов ЭДС Upe и тока Upt, напряжений с выходов тиристорного возбудителя Utv и генератора Ug, противоЭДС
E, тока якоря Ia, момента М и скорости w двигателя.
5. Определить установившиеся значения напряжения с выхода генератора Ug, противоЭДС E, тока якоря Ia, момента М, скорости w двигателя и сравнить их с номинальными зна-
чениями Uном, Еном, Iя.ном, Мном, ном.
6. Устанавливая значения сигнала задания ЭДС Uzе равными 8, 6, 4, 2, получить с помощью осциллографа Scope переходные процессы изменения скорости привода w. Определить время переходного процесса tп.п. и перерегулирование .
7.В блоке Ramp установить наклон характеристики (Slope), равный 500. Время начала пуска (Start Time) установить равным 2.
8.Устанавливая значения сигнала задания ЭДС Uzе1 равными 10, 8, 6, 4, 2, получить семейство механических характеристик электропривода напора экскаватора с помощью плоттера XY Graph.
9.Создать модель системы тиристорный возбудитель – генератор – двигатель для снятия переходных процессов и механических характеристик электропривода подъема экскаватора [10], приведенную на рис. 23.
68

69
Рис. 22. Модель системы управления электропривода напора экскаватора

70
Рис. 23. Модель системы управления электропривода подъема экскаватора