

2379
.pdfвоздействии на ножи крупногабаритных и высокопрочных элементов (мебель, камни, строительные отходы) или при перегрузке системы материалом питающая плита останавливается, а весь блок разрывания перемещается влево. При перемещении расстояние между конвейером и резцами увеличивается до 610 мм, что позволяет мешающим элементам свободно миновать блок разрывателя. Такая система позволяет предохранить элементы блока разрыва от поломки.
Рис. 2. Конструкция разрывателя пакетов |
Рис. 3. Схема работы разры- |
BAGSTOR-HT: 1 – электропривод питаю- |
вателя пакетов BAGSTOR- |
щей плиты; 2 – секция бункера-накопителя; |
HT: 1 – цепной конвейер; |
3 – питающая плита; 4 – загрузочная во- |
2 – качающийся нож; 3 – ре- |
ронка; 5 – цепной конвейер; 6 – пульт |
гулируемые резцы; 4 – дат- |
управления; 7 – блок разрывания; 8 – подъ- |
чикнагрузки |
емныймеханизм |
|
Разрыватель BAGSTOR-HT также может быть использован только для дозирования материала. Для этого блок разрывания устанавливается в одну из 16 позиций, каждая из которых определяет расстояние от конвейера 1 (см. рис. 3) до резцов 3, при этом регулируемые резцы используются только для количественного ограничения подачи, а не для открытия пакетов. Высота дозировки регулируется в пределах от 100 до 400 мм.
Одним из преимуществ такой системы является наличие качающихся режущих элементов вместо вращающихся, благодаря чему отсутствует наматывание на роторы (барабаны) длинномерных элементов (проволока, кабель, стреч-пленка). Другим достоинством дан-
61
ной конструкции является модульная компоновка, когда приемный бункер представляет собой набор стандартных секций 3 (см. рис. 2). То есть при необходимости увеличить производительность можно добавить одну или несколько секций. Скорость подачи материала питающей плитой регулируется в пределах от 0,1 до 500 мм/мин. Заявленная производительность системы при плотности отходов 0,18 т/м3 составляет до 36 т/ч.
Разрыватели пакетов компании COPARM (Италия) [4]. Эта компания выпускает целую линейку унифицированных агрегатов, позволяющих не только рвать мусорные пакеты, но и разбивать кипы, когда линия ориентирована именно на более глубокую сортировку вторичного сырья и входящим потоком для линии служат кипы спрессованного материала. Также конструкция некоторых агрегатов кроме вышеописанных функций позволяет дробить входящий материал
Принцип работы данных агрегатов схож с принципом работы шредеров, машин для измельчения материалов. Конструкция включает в себя рабочую камеру 1 (рис. 4), в которой установлены либо один (модель
TR 50 AS, рис. 4, 5), либо два (моделиAPR 100, APR 200, APR 300, рис. 6, 7) рабочих вала, приводимые в движение гидромоторами 3. На валах имеются специальные билы 4, которые захватывают пакет. В случае одновальной конструкции пакет рвется при зацеплении за неподвижные выступы 5 (см. рис. 5) рабочей камеры при вращении вала. В случае двухвальной – при взаимном разнонаправленном вращении валов. Билы могут быть различной конфигурации – в виде лопаток (см. рис. 5) и в виде резцов (рис. 7). Лопатки и одновальная компоновка применяются в легких конструкциях малой производительности, резцы и двухвальная компоновка– вболеетяжелыхиболеепроизводительных.
Система управления вращением валов регулирует направление подачи рабочей жидкости и величину ее давления в гидросистеме. Это позволяет защищать механизмы от чрезмерных наргузок, а также выдавать мощность в соответствии с внешней нагрузкой, что обеспечивает оптимальное энергопотребление установки. При увеличении внешней нагрузки, например при заклинивании в рабочей камере высокопрочных элементов, система управления реверсирует вращение валов, тем самым расклинивая застрявший элемент. Для удаления мешающих включений элементов из рабочей камеры предусмотрена гидравлическая решетка 6 (см. рис. 5).
62
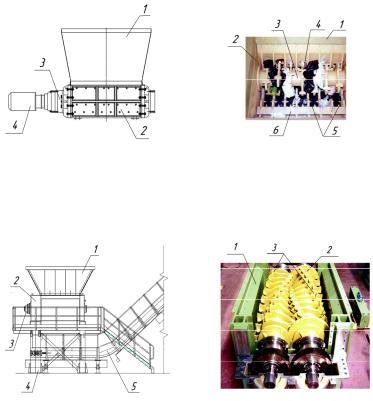
Рис. 4. ОбщийвидразрывателяTR 50 AS: Рис. 5. Компоновка рабочей камеры 1 – приемныйбункер; 2 – рабочаякамера; разрывателя TR 50 AS: 1 – приемный 3 – вал; 4 – гидромотор бункер; 2 – рабочая камера; 3 – вал; 4 – лопатка; 5 – выступы; 6 – решетка
Рис. 6. Общий вид разрывателя APR |
Рис. 7. Компоновка рабочей камеры |
300: 1 – приемный бункер; 2 – рабочая |
разрывателя APR 300: 1 – рабочая |
камера; 3 – вал; 4 – опорная металло- |
камера; 2 – вал; 3 – резец |
конструкция; 5 – транспортер. |
|
Самая легкая машина TR 50 AS позволяет перерабатывать 10– 12 т ТБО в час при затрачиваемой мощности в 37 кВт. Самая тяжелая APR 300 – 50–60 т/ч при потребляемой мощности в 230 кВт.
Выводы
На современном рынке представлена достаточно широкая номенклатура машин данного вида. Практически все они имеют возможность дозирования материала на линию сортировки, что чрезвычайно
63
важно при использовании технологии оптического распознавания материала и механической сепарации.
Анализ конструктивных особенностей показывает, что существует разделение машин по фактору специализации. Более узко специализируемые разрыватели (например, модель «BOS 25000»), т.е. машины, способные только разрывать пакеты, обладают меньшей энергоемкостью процесса при примерно равной производительности, более универсальные модели (например, модель «TR 50 AS»), которые помимо разрывания пакетов способны дробить отходы, «платят» за это намного более высоким уровнем энергоемкости.
Еще одной особенностью является то, что подавляющее число моделей используют вращение режущих элементов при разрыве пакетов, что очень технологично, так как есть возможность применения унифицированного привода. Однако есть модели (например, BAGSTOR-HT), использующие качающиеся режущие элементы. Такая конструкция позволяет предохранить механизм от наматывания длинномерных элементов, однако это усложняет конструктивное исполнение машины.
Настоящая работа выполнена в рамках реализации соглашений о предоставлении и целевом использовании субсидии для реализации научных проектов международными исследовательскими группами ученых на базе государственных образовательных учреждений Пермского края.
Список литературы
1.Основные направления исследований с применением комплекса оборудования глубокой оптико-механической сортировки потоков отходов и материалов / К. Вюнш, Я.И. Вайсман, В.Н. Коротаев, Д.Л. Борисов // Вестник Пермского национального исследовательского политехническогоуниверситета. Охранаокружающейсреды. – 2013. – №2;
2.Каталог оборудования компании EMS [Электронный ре-
сурс]. – URL: http://www.emswasterecycle.com/products/ (дата обращения 03.10.2014).
3.Каталог оборудования компании MetalTech Systems [Элек-
тронный ресурс]. – URL: http://www.metaltechsystems.com/systems-
64
equipment/recycling-sorting-systems/residential-commercial-cd-rdf/bag- opening-system/ (дата обращения 06.10.2014).
4. Каталог оборудования компании Coparm [Электронный ре-
сурс]. – URL: http://www.coparm.biz/bag_openers.htm/ (дата обращения 10.10.2014);
Сведения об авторе
Борисов Дмитрий Леонидович – старший преподаватель кафеды «Автомобили и технологические машины», аспирант кафедры «Охрана окружающей среды», Пермский национальный исследовательский политехнический университет, e-mail: d-borisov@mail.ru.
65
УДК 681.5
А.С. Васенин, А.Г. Шумков, Е.В. Поезжаева
РОБОТИЗАЦИЯ САДОВЫХ ТЕРРИТОРИЙ
Статья посвящена проектированию и расчету робота для обработки садовых территорий. Этот робот сможет помогать человеку в работе на приусадебном/дачном участке. В статье рассматриваются основные функции робота, расчеты звеньев манипулятора и приводится обоснование выбранных технических решений. Используются неординарные технические решения, позволившие сделать робота еще более независимым от человеческого вмешательства.
Ключевые слова: робот-садовник; скашивание газона; полив растений; манипулятор; водяной насос; камера; дистанционное управление; ёмкость для воды; ультразвуковая локация; гусеничный модуль; ГЛОНАСС-навигация.
A.S. Vasenin, A.G. Shumkov, E.V. Pojezjaeva
ROBOTIZATION OF GARDEN TERRITORIES
Scientific work is devoted to design and calculation of the robot for processing of garden territories. This robot will be able to help the person with work on a personal/country plot. In article the main functions of the robot, calculations of links of the manipulator are considered and justification of the chosen technical solutions is given. The extraordinary technical solutions which allowed to make the robot even more independent of human intervention.
Keywords: the robot-gardener; lawn beveling; watering of plants; handler; water pump; camera; remote control; box for water; echolocation; fully-tracked; GLONASS-navigation.
Роботы постепенно занимают все больше и больше места в нашей жизни. Это касается не только высокотехнологичных отраслей, в которых робот с успехом заменяет человека благодаря необходимой точности позиционирования, но и вредных для человеческого здоровья производств, в частности химического производства. Кроме того, роботы стали все чаще использоваться автомобильными концернами, так как они могут работать без перерыва, в результате чего повышается производительность сборочных линий и происходит снижение цены автомобиля. Однако в настоящее время все большую популярность
66

завоевывают роботы, помогающие человеку справляться с повседневными делами и заботами. Именно поэтому мы решили создать проект такого робота с элементами оптимизации его траектории, а также точности выполнения программы (рис. 1).
Рис. 1. Конструкция робота: 1 – корпус; 2 – направляющее колесо; 3 – Трак гусеницы; 4 – камера; 5 – манипулятор; 6 – ролик натяжителя гусеницы; 7 – опорный ролик сегментной косилки; 8 – емкость для воды; 9 – сегментная косилка; 10 – заливное отверстие бака; 11 – поливочный шланг; 12 – манипулятор полива; 13 – ультразвуковой передатчик; 14 – катушка с шлангом
полива; 15 – схват манипулятора
Количество сегментов манипулятора и степень свободы самого манипулятора, как и схвата, ограничено его подвижностью. Манипулятор будет иметь три сегмента, а схват сможет вращаться вдоль продольной оси и поворачиваться в вертикальной плоскости. Также выходное звено будет иметь дополнительное движение для зажима детали. Кроме того, манипулятор должен поворачиваться вокруг своей оси [1]. В качестве движущей силы манипулятора мы решили использовать серводвигатели по следующим причинам:
1)точность двигателей весьма высока;
2)робот точно «знает», в какое положение необходимо определить каждое звено манипулятора;
3)аккумулятор сможет обеспечить достаточное количество циклов работы серводвигателей;
4)усилия, создаваемого серводвигателями, будет достаточно для обеспечения повседневных задач робота.
67

Определение абсолютного положения схвата манипулятора (рис. 2) в пространстве решается математическим методом.
Рис. 2. Манипулятор
Первый поворот в шарнире A на угол 1 вокруг единичного
вектора k . При этом векторы изменят свое положение и перейдут в
векторы i2(1) ,i3(1) [2].
Эти векторы могут быть найдены по формуле Родрига: is(1) is cos 1 (k is )sin 1 (1 cos 1 )(k is ) k ,
где i , k – единичные векторы (орты) декартовой системы координат;
s – число осей единичного вектора, s = 2; 3.
Произведение трех векторов последнего слагаемого вышеприведенного уравнения равно 0, векторы коллинеарны между собой
и ортогональны вектору k , следовательно, получим
68
|
is(1) |
is cos 1 |
(k is ) sin 1. |
|
|
(1) |
||
Второй поворот в шарнире B на угол 2 вокруг вектора |
js(2) . |
|||||||
|
js(2) |
js cos 2 |
(i2 js ) sin 2 , |
|
(2) |
|||
где j – единичный вектор декартовой системы координат, s = 2; 3. |
||||||||
Подставляем в формулу (2), выражение (1), получим |
|
|
||||||
(2) |
|
|
|
|
|
|
|
|
js |
js cos 2 |
|
|
js sin 2 |
|
|
||
is cos 1 |
(k is ) sin 1 |
|
||||||
js cos 2 is js cos 1 sin 2 is sin 1 sin 2 , |
|
|
||||||
где s = 2; 3. |
|
|
|
|
|
|
|
|
Третий поворот осуществим в шарнире C на угол |
3 |
вокруг |
||||||
вектора js(2) [3]. |
|
|
|
|
|
|
|
|
Следует иметь в виду, что два поворота на углы 2 и 3 |
вокруг |
|||||||
параллельных осей эквиваленты одному повороту на угол |
2 3 , |
|||||||
поэтому |
|
|
|
|
|
|
|
|
js(3) js cos 2 3 i3 j3 sin 2 3 i3 sin 1 sin 2 3 .
После определения векторов, задающих положения векторов и звеньев, легко находятся радиусы-векторы точек механизма:
|
|
l |
k , |
|
|
|
|
|
|
||
|
1 |
|
|
||
С l1 k l2 |
j2 |
, |
|||
M l1 k l2 j2 l3.
Найденные векторы полностью определяют абсолютное положение схвата манипулятора в пространстве.
В заключение можно сказать, что проект «Роботизация садовых территорий» мы представляем себе именно таким. Мы постарались спроектировать робота, который бы смог взять на себя часть повседневных забот человека.
69
Список литературы
1.Поезжаева Е.В. Промышленные роботы: учеб. пособие: в 3 ч. – Пермь: Изд-воПерм. гос. техн. ун-та, 2009. – Ч. 2. – 185 с.
2.Поезжаева Е.В. Шагающий робот с контурной системой управления // Проблемы механики современных машин: материалы V Междунар. конф. / ВСГУТУ. – Улан-Удэ, 2012. – Т. 3. – 276 с.
3.Зенкевич С.Л., Ющенко А.С. Управление роботами. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. – 380 с.
Сведения об авторах
Васенин Александр Сергеевич – студент, Пермский нацио-
нальный исследовательский политехнический университет, e-mail: vaseninalexandr@yandex.ru.
Шумков Арсений Геннадьевич – студент, Пермский нацио-
нальный исследовательский политехнический университет, e-mail: vaseninalexandr@yandex.ru
Поезжаева Елена Вячеславовна – кандидат технических наук,
профессор, Пермский национальный исследовательский политехнический университет, е-mail: vaseninalexandr@yandex.ru
70