

Модернизация и научные исследования в транспортном комплексе
..pdf2.Демьянушко И.В., Эльмадави М.Э., Черенков П.В. Исследование влияния геометрических характеристик ребер ортотропных плит мостовых сооружений // Транспортное строительство. – 2009. – № 5. –
С. 30–32.
3.Овчинников И.Г., Овчинников И.Г. Использование поверхностей влияния напряжений при анализе пространственной работы ортотропных плит пролетных строений с замкнутыми продольными ребрами // Дороги и мосты. – М.: РосДорНИИ, 2013. – № 2. – С. 175–186.
Об авторе
Бахтин Сергей Анатольевич (Новосибирск, Россия) – кандидат технических наук, профессор, профессор кафедры «Мосты», Сибирский государственный университет путей сообщения (630049, г. Новосибирск, ул. Д. Ковальчук, 191; e-mail: Bsa1@stu.ru), почетный железнодорожник.
241

УДК 625. 7/.8
МЕРОПРИЯТИЯ ПО ПОВЫШЕНИЮ УРОВНЯ ЭКСПЛУАТАЦИОННОЙ НАДЕЖНОСТИ ЭЛЕМЕНТОВ МОСТОВ С ПРИМЕНЕНИЕМ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ
Б.А. Бондарев
Липецкий государственный технический университет, Россия
Рассмотрены основные принципы обеспечения безопасности эксплуатируемых строительных конструкций, наиболее часто встречающиеся дефекты, повреждения, причины их возникновения и влияние на долговечность автодорожных и городских мостов. Предложены мероприятия по повышению уровня эксплуатационной надежности с применением полимерных композиционных материалов. Отмечено, что широкое применение полимерных композиционных материалов для повышения уровня эксплуатационной надежности элементов мостов сдерживается из-за слабой изученности их свойств под действием многократно приложенных нагрузок и их возможности сопротивляться усталости. Поэтому научные исследования этого вопроса являются актуальными.
Ключевые слова: дефекты мостов, полимерные материалы, транспортные конструкции, защита от коррозии.
Перспективная инновационная деятельность в дорожном хозяйстве и экономической эффективности связана с применением новых методов и материалов. В настоящее время в транспортном строительстве при проектировании мостовых сооружений начинают применять для защиты конструктивных элементов полимерные композиционные материалы [1, 2].
Основные принципы повышения эксплуатационной надежности мостовых сооружений представлены на рис. 1, из которого видно, что параметр безопасной эксплуатации (циклическая долговечность) определяется в пять этапов, и первый из них – это оценка опасных производственных факторов, оказывающих влияние на материал строительных конструкций.
242
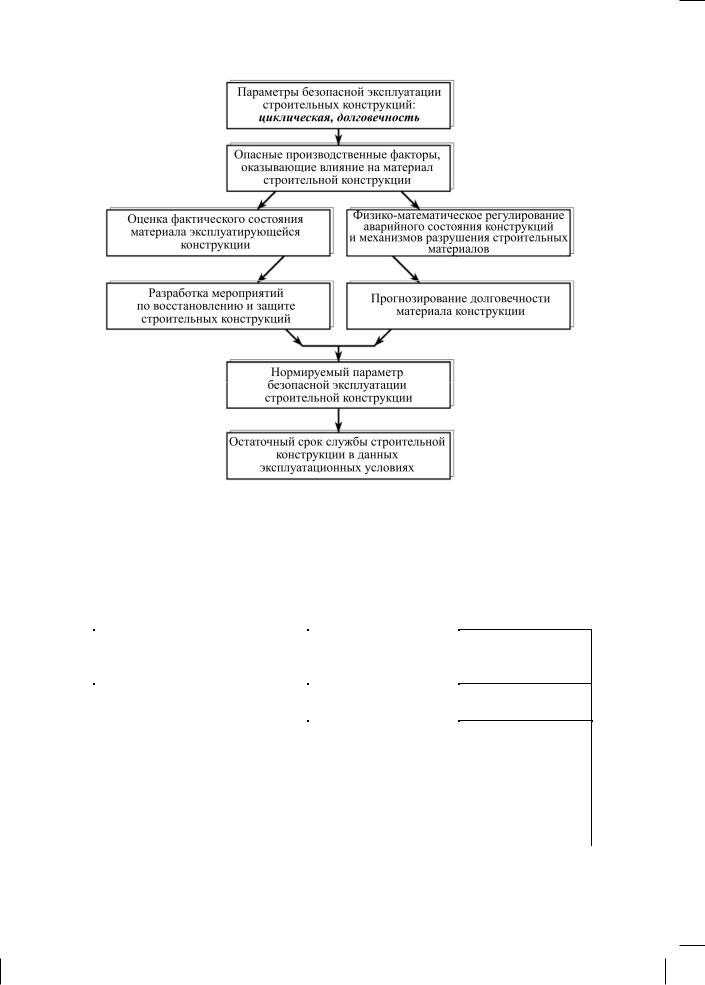
Рис. 1. Основные принципы обеспечения безопасности эксплуатируемых строительных конструкций
Ниже приведены основные дефекты и разрушения элементов конструкций железобетонных пролетных строений, оказывающих существенное влияние на их грузоподъемность.
Дефекты элементов |
Последствия развития |
конструкциймоста, причины |
дефектов и ихвлияние |
ихвозникновения |
надолговечностьмоста |
1 |
2 |
I. ЖелезобетонныеПСмостов |
|
Разрушение бетона (карбониза- |
Снижениегрузоподъ- |
ция, выщелачивание, появление |
емностиидолговечно- |
пятен, выколов, сталактитов) |
сти ПСмоста |
главных балок, плиты из-за |
|
дефектов ГИ, элементов водоот- |
|
вода, несоблюдения уклонов |
|
проезжей части |
|
Меры поликвидации
дефектов
3
Ремонт ГИ, элементов водоотвода, восстановление проектныхуклонов
243

Продолжение таблицы
1 |
2 |
3 |
Разрушение бетона (карбониза- |
Снижениегрузо- |
Ремонт ГИ, элемен- |
ция, выщелачивание, появление |
подъемности идолго- |
тов водоотвода, вос- |
пятен, выколов, сталактитов) |
вечностиПСмоста |
становление про- |
главных балок, плиты из-за де- |
|
ектных уклонов |
фектов ГИ, элементов водоотво- |
|
|
да, несоблюдения уклонов про- |
|
|
езжей части |
|
|
Повреждениезащитного слоя, |
Тоже |
Восстановление во- |
коррозияарматурывследствие |
|
доотвода и защитно- |
недостаточной толщины слоябе- |
|
го слоя бетона |
тона, протечекводы |
|
|
Разрушение стыков поперечных |
Снижениепространст- |
Восстановление эле- |
связей (диафрагм) между балками |
венной жесткости, гру- |
ментов объединения |
сборных ПС ввиду некачествен- |
зоподъемности и долго- |
балок ПСпо специ- |
ноговыполненияработ |
вечности |
альному проекту |
Разрушение продольных стыков |
Уменьшениепопереч- |
Ремонт продольных |
между балкамии шпоночных |
ной жесткости, сниже- |
стыков, укладкадо- |
стыков объединениямежду пли- |
ниегрузоподъемности |
полнительного слоя |
тами ПСввиду несовершенства |
идолговечности ПС |
бетона спроверкой |
конструкций стыков инекачест- |
|
грузоподъемности |
венноговыполнения |
|
|
Поперечные трещиныв ребрах |
Снижениегрузо- |
Ремонт опорныхчас- |
балок ипоясах вследствиепотери |
подъемности, долго- |
тей, заделка трещин |
подвижностиопорныхчастей и |
вечностиибезопасно- |
эпоксидными ком- |
воздействия температурыот нор- |
стидвижениятранс- |
паундами, усиление |
мальныхсил ирастягивающих |
портаи пешеходов |
ПС |
напряжений |
|
|
Вертикальные(поперечные) тре- |
Снижениегрузоподъ- |
Ремонт концевых |
щины, возникающиев зонах опи- |
емности, долговечности |
участков балок, |
рания на опорныечастив местах |
моста. Коррозияарма- |
заделкатрещин, |
сосредоточения растягивающих |
туры |
разгрузкабалок, |
усилий |
|
подведение допол- |
|
|
нительнойопоры |
Вертикальные трещины в замке, |
Уменьшениегрузо- |
Ремонт – заделка |
ценовых стенках, пятах арки |
подъемности идол- |
трещин эпоксидны- |
(свода) вследствиетемпературно- |
говечности. Коррозия |
ми компаундами |
усадочныхдеформаций, при от- |
арматуры |
с добавками БЩ |
сутствииилинеисправностиДШ |
|
|
244
|
Окончание таблицы |
|
|
|
|
1 |
2 |
3 |
Продольные трещиныв ребрах |
Снижениегрузоподъ- |
Заделкатрещин |
балок, возникающиевследствие |
емности, долговечно- |
при ремонта ПС |
усадки, нарушениятехнологии |
сти. Коррозия арматуры |
|
изготовления, силовые– отчрез- |
|
|
мерногообжатиябетона |
|
Ремонт концевых |
Наклонныесиловыетрещиныв |
Снижениегрузоподъ- |
|
приопорныхучасткахглавныхба- |
емности, долговечности |
участковбалок по- |
локнеразрезныхПСввидувоздей- |
ибезопасностидвиже- |
лимербетонами |
ствиябольшихглавныхрастяги- |
ния транспорта ипеше- |
|
вающихнапряжений, недостатков |
ходов |
|
армированияирасположенияпуч- |
|
|
ковпреднапряженнойарматуры |
|
Ремонт концевых |
Попадание воды и выщелачива- |
Снижение долго- |
|
ние бетона торцов балок в мес- |
вечности сооружения. |
участков балок |
тах расположения анкеров, |
Коррозия арматуры |
полимербетонами |
а также в пустотах плитных |
|
|
предварительно напряженных |
|
|
ПС из-за дефектов ГИ и инъек- |
|
|
цирования каналов |
|
Ремонт – восста- |
Местные сколы бетона при опи- |
Снижение грузоподъ- |
|
сании консольных балок ПС на |
емности и долговеч- |
новление сколов |
опорные части ввиду недоста- |
ности. |
полимербетоном |
точного армирования |
Коррозия арматуры |
Заделка трещин |
Продольные трещины в сухих |
Снижение долговеч- |
|
стыках сборных блоков ввиду |
ности |
|
неполного совпадения микро- |
|
|
рельефа торцов элементов |
|
|
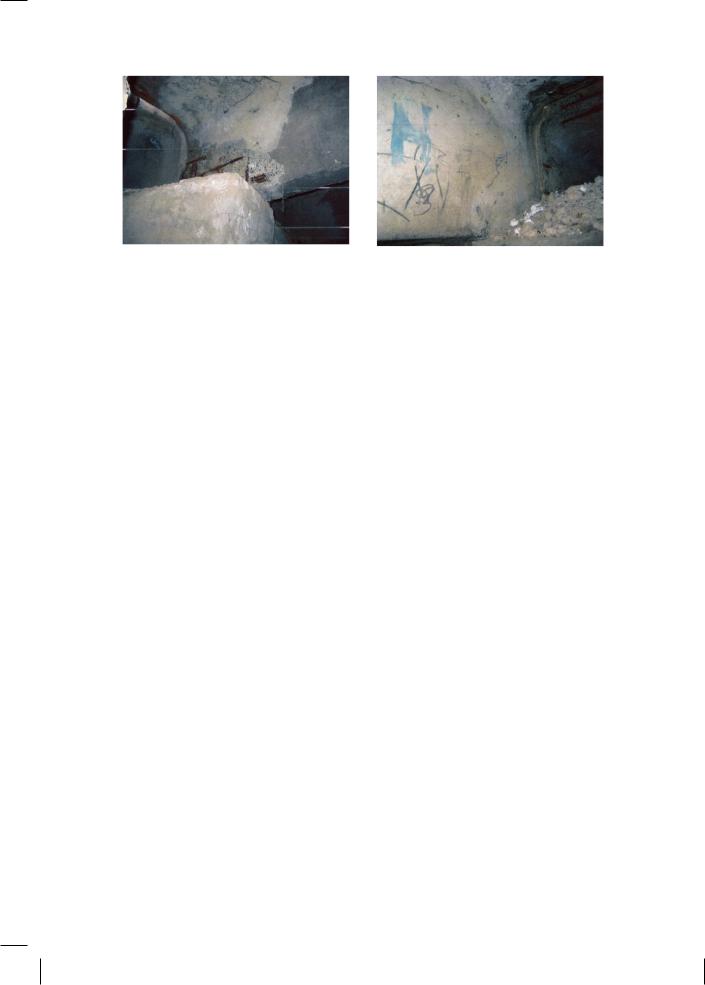
Оценка фактического состояния материала, эксплуатируемых конструкций главных балок пролетных строений мостовых сооружений, проводится в ходе их технического обследования в соответствии с нормативными документами (рис. 2).
Далее разрабатываются мероприятия по повышению уровня эксплуатационной надежности с применением полимерных композиционных материалов по двум вариантам:
1)применение смол (ФАЭИС-30);
2)применение композиции типа «Силор».
245
а |
б |
Рис. 2. Разрушение и выщелачивание бетона, обнажение и интенсивная коррозия рабочей арматуры в ребре главной балки (а); вертикальные
и наклонные трещины шириной раскрытия до 5 мм в ребре главной балки (б)
Широкое применение вышеуказанных полимерных композиционных материалов сдерживается из-за слабой изученности их свойств под действием многократно приложенных нагрузок и их возможности сопротивляться усталости [3]. Научные исследования этого вопроса являются актуальными.
Под усталостью материалов понимают процесс постепенного накопления локальных повреждений под действием изменяющейся нагрузки. Если разрушение материала является результатом действия циклического напряжения, то оно именуется усталостным. Кривую усталости можно условно разбить на три участка: 1-й участок малоцикловая усталость; 2-й участок – многоцикловая усталость и 3-й участок – длительное сопротивление усталости. Наличие трех участков на кривой отражает различие в кинетике накопления усталостных разрушений в материале при различной продолжительности циклического нагружения. Сопротивление усталости материала определяется его выносливостью. Испытаниям на выносливость всегда предшествуют статические испытания, позволяющие определить величины разрушающих нагрузок [4].
Список литературы
1. Организационно-экономический механизм инновационной деятельности дорожного хозяйства / С.П. Аржанухина, А.А. Сухов, А.В. Кочетков, Л.В. Янковский // Инновационный вестник «Регион». – 2012. –
№ 4. – С. 40–45.
246

2.Кочетков А.В., Янковский Л.В. Перспективы развития инновационной деятельности в дорожном хозяйстве // Инновационный транс-
порт. – 2014. – № 1 (11). – С. 42–45.
3.Карабутов Н.Н., Бондарев Б.А., Шмырин А.М. Синтез математических моделей для исследования свойств полимеробетона в системе автоматизированной диагностики дорожных покрытий // Приборы и системы. Управление, контроль, диагностика. – 2006. – № 4. – С. 27–30.
4.Экспериментальные исследования циклической долговечности полимерных композиционных материалов / Б.А. Бондарев, П.В. Борков, П.В. Комаров, А.Б. Бондарев // Современные проблемы науки и обра-
зования. – 2012. – № 6. – С. 136.
Об авторе
Бондарев Борис Александрович (Липецк, Россия) – доктор тех-
нических наук, профессор, профессор кафедры «Строительные материалы», советник РААСН, депутат Липецкого городского Совета депутатов, Липецкий государственный технический университет (398002,
г. Липецк, ул. Балмочных, 15; e-mail: lnsp-48@mail.ru).
247

УДК 629.584, 007.52
МОДЕЛИРОВАНИЕ АВТОМАТИЧЕСКОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДА ПОДВОДНЫМ АППАРАТОМ В СРЕДЕ SUBSIM
А.Н. Борисов
Институт проблем транспорта им. Соломенко РАН, Санкт-Петербург, Россия
Рассматривается имитационное моделирование системы управления обследовательского АНПА в среде SubSim. SubSim – универсальная среда моделирования подводных аппаратов, разработанная в университете Западной Австралии в целях повышения интереса к АНПА начинающих исследователей. Описываются возможности среды, процесс создания полигона исследований и компьютерной модели робота, разработка системы управления.
Ключевые слова: подводный робот, АНПА, среда моделирования, обработка изображений, компьютерное зрение, идентификация объектов, система управления.
Автономный подводный робот представляет собой автоматический самоходный носитель исследовательской аппаратуры, способный погружаться в заданной акватории и выполнять необходимые работы [1]. При этом список решаемых задач весьма обширен: картографирование дна, обследование подводных трубопроводов, экологические измерения, осмотр возможных внешних повреждений водных транспортных средств.
На небольших глубинах, до 20–40 метров, необитаемые аппараты все больше теснят водолазов, поскольку могут выполнять различные работы, не рискуя здоровьем человека [2]. К преимуществам использования АНПА можно отнести малое количество обслуживающего персонала, возможность работать при любых погодных условиях, высокая мобильность.
Подводное обследование нефте- и газотрубопроводов позволяет в реальном времени получать объективную информацию о состоянии сооружений, не отходя от пульта оператора. С использованием АНПА могут решаться следующие задачи: идентификация объектов, гидроло-
248

кационное обследование предполагаемого места прокладки трубопровода, текущий мониторинг состояния подводных сооружений [2].
Для решения этих задач АНПА должен быть оборудован надежными средствами идентификации протяженного объекта. К таким средствам обычно относят оптические, электромагнитные и акустические бортовые сенсоры АНПА [3]. Кроме того, система управления такого аппарата должна с успехом справляться с возникающими трудностями.
Проектирование алгоритмов управления – это весьма долгий и трудоемкий процесс. Целесообразным является использование имитационных программных комплексов для тестирования и отладки алгоритмов управления [4]. Такая практика значительно сокращает финансовые и временные затраты по сравнению с натурными экспериментами.
На сегодняшний день существует ряд программных продуктов, ориентированных на моделирование динамики и алгоритмов управления роботов разнообразного назначения и функционирующих на земле, в воде и в воздухе. В качестве примеров можно привести Microsoft Robotics Developer Studio, TeamBots, Simbad, onDesk.
Наиболее подходящей для моделирования подводных роботов является среда SubSim [5,6]. SubSim предоставляет огромные возможности для разработки приложений и позволяет провести моделирование движения, настройку контроллера, тестирование алгоритмов управления. Данный проект является некоммерческим и использует несколько открытых библиотек. Например, движение твердых объектов под влиянием сил и моментов точно моделируется благодаря использованию возможностей трехмерного физического движка реального времени Newton Dynamics. Датчики, двигатели и воздействие жидкости моделируется с помощью библиотеки Physics Abstraction Layer (PAL). В состав библиотеки входят такие сенсоры, как компас, гироскоп, датчики линейной и угловой скорости, камеры и сонары. Для генерации видеоизображений используется OpenGL. Архитектура приложения строится на плагинах. Многие компоненты, включая пользовательский интерфейс, API, симуляция физики, могут быть изменены для удовлетворения пользовательских потребностей. Это позволяет легко расширять моделируемые системы за счет добавления различных плагинов, написанных на любом языке, который поддерживает динамические библиотеки [5].
Проектирование можно разделить на несколько основных этапов: создание окружающего мира для функционирования аппарата, напол-
249

нение мира объектами, создание модели аппарата, разработка и тестирование ПО.
Описание мира в SubSim включает в себя такие аспекты окружающей среды, как вода, бассейн, форма дна и объекты. Форма дна бассейна описывается растровым графическим файлом в серых тонах по технологии Heightmap. Каждый пиксел описывает высоту соответствующей точки дна. Черным цветам будет соответствовать самая высокая точка, а белым – дно бассейна. Объекты в модели должны иметь уникальные имена, чтобы была возможность связать его с моделируемым физическим телом в программе для его правильного поведения. Кроме того, в файле указывается ссылка на 3D-модель и коэффициенты масштабирования. При описании объектов требуется задание таких параметров, как форма, масса, объем. SubSim поддерживает всего три типа тел: прямоугольная призма (длина, ширина, высота), цилиндр (высота и радиус), шар (радиус). Для робота, кроме того, нужно указать подключаемые датчики и приводы. В среде поддерживается несколько типов датчиков: гироскоп, спидометр, датчик расстояния, компас, камера.
Когда полигон готов, можно приступать к разработке ПО. Для упрощения задачи программирования используется плагин Eyebot. Он расширяет стандартные возможности среды библиотекой высокоуровневых функций RoBIOS и добавляет модель физического контроллера с LCD экраном и кнопками для ввода информации. RoBIOS содержит множество системных вызовов для работы с внешними устройствами, такими как компас, двигатели, датчики, аналоговый и цифровой ввод-вывод.
Для моделирования движения АНПА вдоль трубопровода в среде SubSim мы можем использовать данные с видеокамеры, ориентированной ко дну. Для оценки ориентации и положения аппарата используются данные от датчиков угловых скоростей и ускорений [7]. Для упрощения мы будем идентифицировать трубопровод по цвету. Все искомые трубы в модели будут иметь белый цвет, что сильно выделяет их на фоне темного дна. На рисунке показана 3D-модель аппарата, а также визуализация процесса движения вдоль трубопровода и кадр видео, получаемый от камеры. Текущий курс аппарата определяется в зависимости от ориентации трубы на фото, а расстояние до трубопровода поддерживается постоянным. Таким образом, в приведенной упрощенной модели мы имеем два регулируемых параметра – глубина и курс аппарата. А поскольку программы управления в среде SubSim проектируются на языке Си, то существует возможность моделирования различ-
250