

Элементы систем автоматики
..pdfФедеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
«Пермский государственный технический университет»
Кафедра электрификации и автоматизации горных предприятий
Р. А. Сажин
ЭЛЕМЕНТЫ СИСТЕМ АВТОМАТИКИ
Конспект лекций
Издательство Пермского государственного технического университета
2007
ÓÄÊ 680.51 Ñ14
Сажин, Р. А.
Ñ14 Элементы систем автоматики: конспект лекций / Р. А. Сажин.— Пермь: Изд-во Перм. гос. техн. ун-та, 2007.— 99 с.
ISBN 978-5-88151-654-3
Изложены вопросы применения, устройства и принципа работы современных средств автоматизации производственных процессов. Особое внимание уделено вопросам, связанным с принципами организации средств цифровой автоматики и их взаимодействия с аналоговыми элементами в микропроцессорных устройствах управления, которые составляют основу современных систем автоматизации.
Предназначено для студентов очного и очно-заочного обучения по специальности ЭАПУ.
ÓÄÊ 680.51
ISBN 978-5-88151-654-3 |
© ГОУ ВПО «Пермский |
|
государственный технический |
|
университет», 2007 |
|
© Сажин Р. А., 2007 |
ВВЕДЕНИЕ
Современные системы автоматического управления представляют собой сложные структуры, состоящие из разнотипной элементной базы. Целью настоящего курса лекций является знакомство студентов с основами принципов организации построения этих элементов, основное назначение которых заключается в регистрации, обработке информации и формировании на ее основе управляющего воздействия на объект управления. Важнейшими из всех элементов являются элементы для ее регистрации.
1. ИНФОРМАЦИЯ И ЕЕ РОЛЬ В УПРАВЛЕНИИ
Анализ структур всех видов автоматических систем управления показывает, что в каждую из этих структур составной частью входит информация, на основе обработки которой производится управление объектом.
1.1. Основные понятия о информации
Информация — это совокупность сведений об окружающем мире. Применительно к системам управления, информация — это совокупность сведений о состоянии объекта управления, результатах управления, внешней среде и результатах ее воздействия на объект управления, а для автоматических систем это еще сведения об уровнях сигналов в самой системе управления. Информация в системах управления может отображаться двояко: с помощью сигналов и символов.
3
Сигнал — это материальное отражение информации через изменение конкретного физического процесса. Природа сигнала всегда материально-физическая.
Например, для отображения температуры используется сигнал, который формируется процессом расширения нагретых физиче- ских тел или за счет процесса изменения величины сопротивления электрическому току нагретых физических тел.
Количественно информация в сигнале измеряется числом единиц измерения того физического процесса, через который она отображается.
Сигналы могут быть следующих видов:
1.Сигнал результата управления (формируется на выходе объекта управления).
2.Управляющий сигнал (подается на вход объекта управления).
3.Задающий сигнал. (подается на вход автоматического устройства управления (АУУ)).
4.Корректирующий сигнал (корректирует свойства устройства управления, подается на вход АУУ).
5.Сигнал обратной связи. Это часть сигнала результата управления (подается на вход устройства управления по каналу обратной связи). Системы управления с сигналами обратной связи называются замкнутыми системами управления.
6.Сигнал внешнего воздействия (формируется внешней средой; воздействует на все элементы системы и представляется в двух формах: возмущения и помехи).
Возмущением называется такой сигнал внешнего воздействия, появление которого предсказуемо как по величине, так и по времени появления.
Пример: Известно, что температура января в средней полосе России может колебаться в пределах от +5 до –50 градусов, поэтому такое изменение может считаться возмущением для систем управления.
Помехой называется сигнал внешнего воздействия, время появления которого не предсказуемо так же, как не предсказуем характер поведения этого сигнала.
4
Пример: Возможно, но неизвестно, когда температура в январе
âсредней полосе России может достичь величины +25 градусов, а в июле –25 градусов. Появление такого сигнала считается помехой для систем управления.
Символ — это материальное отражение информации или ее части в отдельном знаке или в каком-либо биполярном физическом процессе.
Пример: Типичным символом является любой дорожный знак,
âкотором содержится полная информация. Примером частичного отражения информации через символ является буква как часть слова или цифра как часть числа. В автоматике символы отображаются через биполярные физические процессы (ток, напряжение, свет или магнитное поле) в виде двоичных цифр (0 и 1).
Цифровой сигнал — это последовательная совокупность единичных и нулевых символов заданной разрядности. Разрядность цифрового сигнала, как правило, всегда кратна восьми (и может быть равной 8, 16, 32 или 64).
Количественно информация в одном символе всегда численно равна 1 биту. Более крупными единицами символьной информации являются:
байт = 8 бит, килобайт = 1024 байт,
Мегабайт = 1024 кбайт = 10242 байт, Гигабайт = 1024 Мбайт = 10242 кбайт = 10243 áàéò,
Терабайт = 1024 Гбайт =10242 Мбайт =10243 кбайт =10244 áàéò.
1.2. Технические средства получения информации
Для получения информации в системах автоматического управления используются следующие технические средства: воспринимающие элементы, измерительные преобразователи.
Воспринимающим элементом называется такое техническое средство получения информации, которое регистрирует скачкообразно эту информацию за порогом своей чувствительности, т. е. этот элемент регистрирует только наличие информации выше определенного порогового уровня и всегда отвечает на вопрос, есть или нет информация выше этого уровня. Основой воспринимающего элемента
5

является пороговый элемент, который скачкообразно меняет свое состояние под действием информации определенного уровня. Структура воспринимающего элемента представлена на рис. 1.
Рис. 1. Структура воспринимающего элемента
Примером воспринимающего элемента может служить геркон — магнитоуправляемый, герметичный контакт. Если к геркону подвести внешнее магнитное поле, то контакты намагничиваются и притягиваются друг к другу, т. е. геркон срабатывает на магнитное поле только определенной напряженности и остается замкнутым, если в дальнейшем повышать эту напряженность.
Измерительным преобразователем называется такое техниче- ское средство получения информации, которое пропорционально реагирует на изменение уровня информации и способен количественно оценивать этот уровень. Основой исполнительного преобразователя является чувствительный элемент, физическое состояние которого изменяется под влиянием соответствующей информации. Структура измерительного преобразования представлена на рис. 2.
Рис. 2. Структура измерительного преобразования
Состояние чувствительности элемента этого преобразователя зависит от уровня информации. Чем выше уровень информации, тем больше активизируется чувствительный элемент. Природа чувствительного элемента определяется природой той информации, для восприятия которой он предназначен.
Воспринимая информационный поток за порогом своей чувствительности, этот элемент преобразует соответствующий уровень
6
информации в поток энергии соответствующего вида (сигнал), который поступает на вход управляемого источника внешней энергии в том случае, когда уровень выходного сигнала этого преобразователя недостаточен для управления объектом. Измерительные преобразователи и воспринимающие элементы чаще называют датчи- ками. Первые из них являются датчиками дискретного типа, а вторые — аналоговыми датчиками.
2. ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИЗАЦИИ
ДЛЯ АНАЛОГОВЫХ СИСТЕМ
2.1. Технические средства получения информации, или датчики
2.1.1.Характеристики датчиков, как элементов получения информации
Все типы датчиков систем автоматики предназначены для получения информации определенного вида и должны иметь необходимую чувствительность, погрешность ниже достаточного уровня
èобладать необходимым быстродействием.
1.Чувствительность датчика. Под чувствительностью датчи- ка понимают минимальное значение входного измеряемого датчи- ком параметра, при котором появляется выходной сигнал, отлич- ный от нуля.
2.Погрешность датчика. Погрешностью датчика называют разность между истинным значением измеряемой величины и ее значением в сигнале.
3.Время срабатывания. Под временем срабатывания понимают временной промежуток между появлением измеряемой величи- ны на чувствительном элементе датчика и ее регистрацией в сигнале. Как правило, это всегда время запаздывания, которое характеризует параметры быстродействия датчиков.
7
2.1.2. Классификация датчиков
Все датчики делятся по следующим признакам: назначению, способу формирования энергии сигнала датчика, виду сигнала.
По назначению датчики подразделяются на несколько типов:
1.Датчики линейных и угловых перемещений, которые по типу чувствительного элемента делятся на датчики: потенциометрические; индуктивные; трансформаторные и сельсины.
2.Датчики скорости и ускорения.
3.Датчики усилия и момента.
4.Датчики температуры.
5.Датчики давления.
6.Датчики расхода.
По способу формирования энергии сигнала они делятся на дат- чики генераторного типа, параметрического типа.
В датчиках генераторного типа информация генерирует энергию сигнала, в то время как в датчиках параметрического типа информация меняет параметры чувствительного элемента, которые отражаются на величине сигнала.
По виду сигнала они подразделяются на датчики электриче- ские, пневматические, механические.
2.2. Потенциометрический датчик линейных угловых перемещений
Для измерения линейных или угловых перемещений объектов управления используют потенциометрические датчики. Схема различных типов этих датчиков показана на рис. 3.
Потенциометрический датчик состоит из каркаса 1, выполненного из изоляционного материала, рабочей обмотки, намотанной на этом каркасе и выполненной из материала с большим омическим сопротивлением, и движка 2, который всегда связан с объектом управления и перемещается им по поверхности рабочей обмотки. Рабочая обмотка питается от источника постоянного напряжения. Выходной сигнал снимается между движком и одним из полюсов источника питания. Форма каркаса прибора определяется его назначением. Так для замера линейных перемещений каркас всегда
8
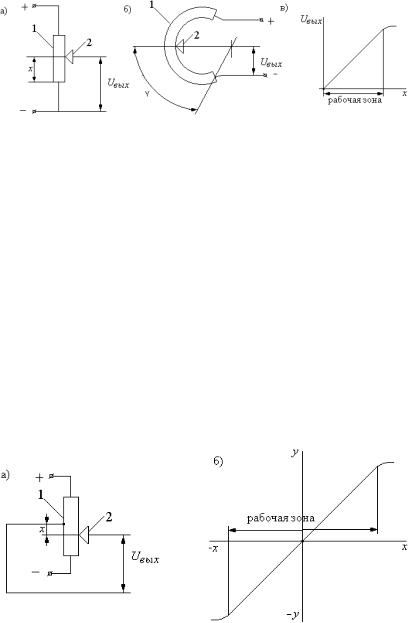
Рис. 3. Схема однополярного потенциометрического датчика: а) линейного перемещения, б) углового перемещения,
в) характеристика. потенциометрического датчика
прямолинеен, а для замера угловых перемещений каркас изгибается по радиусу. Характеристика потенциометрического датчика представлена на рис. 3, в.
Эта характеристика всегда линейна. Но ее линейность сохраняется только в пределах рабочей зоны. Характеристика такого датчи- ка однополярна, что является существенным недостатком. Для устранения этого недостатка используют биполярные схемы потенциометрических датчиков.
Биполярность потенциометрического датчика достигается от- счетом перемещения движка от средней точки рабочей обмотки, при этом выходной сигнал снимается движком относительно этой же точки. Принципиальная схема и характеристика биполярного потенциометрического датчика представлены на рис. 4.
Рис. 4. Схема биполярного потенциометрического датчика линейных перемещений
9

Линейность характеристики этого датчика сохраняется также только в его рабочей зоне.
2.3. Индуктивный датчик линейных перемещений
Принцип работы индуктивного датчика основан на законе Ома для переменного тока. Ток, который течет по рабочей обмотке, описывается по этому закону формулой:
U
I  , (1)
, (1)
 R 2 2L2
R 2 2L2
ãäå: 2L2 — реактивное сопротивление.
R — сопротивление в цепи рабочей обмотки (нагрузка).— частота переменного тока.
L — индуктивность рабочей обмотки датчика.
В свою очередь индуктивность рабочей обмотки датчика рас- считывается по формуле:
|
4 |
2W |
(2) |
|
L |
|
|
K |
|
|
|
|||
|
F |
|
||
ãäå: W — число витков рабочей обмотки.
F — площадь поперечного сечения магнитопровода и якоря.— зазор между якорем и магнитопроводом. Индуктивность этого датчика, определяющая ток его сигнала,
прямо пропорциональна величине зазора . Принципиальная схема и характеристика индуктивного датчика представлены на рис. 5.
Индуктивный датчик состоит из магнитопровода 1, рабочей обмотки 2, которая питается от источника переменного напряжения, и якоря 3, связанного с объектом управления.
Принцип работы датчика. Объект управления, перемещая якорь 3 относительно магнитопровода 1, изменяет тем самым зазор. В результате этого согласно формулам (1) и (2) меняется величи- на индуктивности, что как следствие, приводит к изменению силы тока выходного сигнала датчика. Характеристика этого датчика представлена на рис. 5, б. Хотя эта характеристика нелинейна, но ее рабочая зона выбирается в той области, в которой она близка к ли-
10