

Элементы систем автоматики
..pdfтерь расстояние от одной стенки бункера до другой. Сами стенки этого бункера должны быть прозрачными для излучения. Если уровень сыпучего материала достигнет или превысит уровень луча и поглотит его, то приемник отреагирует на это появлением соответствующего сигнала.
Во втором варианте источники излучения — полупроводниковые лазеры 1, и его приемники — фотодиоды 2, расположены на разных уровнях внутри бункера. Мощность излучателя в этом слу- чае должна быть не высокой, для того чтобы сыпучий материал перекрывающий зазор между излучателем 1 и приемником 2, был способен поглотить энергию этого излучения. При восприятии излуче- ния фотодиодами каждый из них шунтирует соответствующее сопротивление 3, тем самым пропорционально-дискретно изменяет величину выходного сигнала.
Рис. 14. Схема датчиков для измерения уровня раздела сыпучих сред
Кроме видимого света в таких датчиках могут быть использованы источники радиоактивного ионизирующего излучения.
2.7. Датчики скорости
Датчики скорости, как правило, являются датчиками генераторного типа. Поток энергии сигнала датчика скорости возбуждается в электрогенераторах особого типа, которые должны обязательно обладать линейной характеристикой. Такие генераторы электри- ческой энергии называются тахогенераторами. Существует два типа тахогенераторов: постоянного тока и переменного тока.
21

2.7.1. Тахогенератор постоянного тока
Схема тахогенератора постоянного тока представлена на рис. 15, а. Такой тахогенератор состоит из вращающегося ротора 1, с секционной роторной обмоткой, связанного с объектом управления, который задает ему угловую скорость . Возбуждение генератора производится статорной обмоткой возбудителя 2 или с помощью статорного постоянного магнита.
Рис. 15. Схема тахогенератора постоянного тока
Принцип работы этого тахогенератора. При вращении ротора в магнитном поле статорной обмотки возбуждения в обмотке ротора наводится ЭДС, пропорциональная скорости вращения ротора, которая с вращающегося ротора снимается щетками 3. Эта ЭДС изменяется по линейному закону в рабочей области измерения скоростей (рис. 15, б). За пределами рабочей области происходит насыщение магнитной системы датчика, поэтому появляется нелинейность в его характеристике.
2.7.2. Тахогенератор переменного тока
Тахогенераторы переменного тока бывают двух видов: синхронными и асинхронными.
Синхронный тахогенератор переменного тока, представленный на рис. 16, а состоит из магнитопровода 1, ротора 2, выполненного в форме постоянного магнита, связанного с объектом управления и рабочей обмотки 3, связанной с выпрямителем 4.
Принцип работы синхронного тахогенератора переменного тока. При вращении ротора 2 объектом управления, полюса постоянного магнита создают переменное магнитное поле в магнитопроводе 1. Это поле наводит переменную ЭДС в рабочей обмотке 3, кото-
22
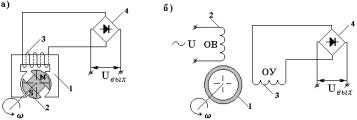
рая выпрямителем 4 преобразуется в выходной сигнал постоянного тока. Амплитудное значение переменного напряжения статорной обмотки зависит от скорости вращения ротора.
Рис. 16. Схема синхронного (а) и асинхронного (á) тахогенераторов
Асинхронный тахогенератор переменного тока, представленный на рис. 16, б, состоит из ротора 1, выполненного в форме полого цилиндра и связанного с объектом управления, и двух статорных обмоток со взаимно перпендикулярными магнитными осями. Одна из этих обмоток — обмотка возбуждения 2, подключена к источнику переменного напряжения. Вторая обмотка управления 3, связана с выпрямителем 4.
Принцип работы асинхронного тахогенератора переменного тока:
а) при неподвижном роторе. При подаче переменного напряжения в обмотку возбуждения создается первичный переменный магнитный поток, который наводит на поверхностном слое ротора вихревые токи. Эти токи, в свою очередь, создают вторичный магнитный поток, смещенный по времени появления на некоторый угол (как правило, 90°). При неподвижном роторе вторичный магнитный поток не будет сцепляться с обмоткой управления, поэтому выходной сигнал равен нулю.
б) при вращающемся роторе. Направление вторичного магнитного потока будет отклоняться от вертикали тем больше, чем больше скорость его вращения. Поэтому при отклонении от вертикали вторичный магнитный поток будет сцепляться с обмоткой управления тем больше, чем больше скорость вращения ротора. Вторичный магнитный поток будет создавать переменную ЭДС в обмотке управления тем больше, чем больше скорость вращения. Выпрями-
23

тель преобразует переменную ЭДС обмотки управления в выходной сигнал постоянного напряжения. Амплитуда сигнала прямо пропорциональна скорости вращения ротора.
Тахогенераторы переменного тока обоих типов имеют характеристику, аналогичную характеристике тахогенератора постоянного тока.
2.8. Датчики усилия и момента
Различают 3 типа датчиков усилителя и момента: тензометри- ческие, магнитострикционные и пьезометрические
2.8.1. Тензометрический датчик
Основой такого датчика является тензометрический, чувствительный элемент, схема которго представлена на рис. 17, а. Тензометрический, чувствительный элемент состоит из изоляционной подложки 1 и наклеенной на нее петлевой обмотки 2, выполненной из тонкой проволоки с высоким омическим сопротивлением или вырубленной из микронной фольги с аналогичными свойствами материала. В свою очередь, подложка наклеивается на деформируемый усилием F элемент 3.
Рис. 17. Схема тензометрического элемент (а) и его подключение в измерительную схему (б)
Принцип работы тензометрического датчика. При совместной деформации под действием усилия F элемента 3 и тензометриче- ского элемента 1 деформирует и петлевая обмотка этого тензоэлемента. По закону Гука любая продольная деформация тела вызывает появление его поперечной деформации, поэтому при продольной деформации петлевой обмотки на величину L происходит измене-
24

ние поперечного сечения ее провода (или фольги), что, в свою оче- редь, по закону Ома вызывает пропорциональное изменение омиче- ского сопротивления этой обмотки на величину R. Эта пропорциональность может быть отражена следующей математической зависимостью:
|
L |
|
R |
, |
(7) |
||
|
|
|
|||||
|
L R |
|
|||||
R |
R L |
, |
(8) |
||||
|
|||||||
|
|
|
|
L |
|
||
ãäå L — длина петлевой обмотки;
R — сопротивление петлевой обмотки.
Даже при значительном удлинении петлевой обмотки величина изменения ее сопротивления составит доли Ома, поэтому, чтобы уверенно зафиксировать изменение выходного сигнала, применяют мостовую схему подключения тензоэлементов, представленную на рис 17, б. По этой схеме в одно из плеч резисторного моста вводятся сопротивления рабочего и компенсационного тензоэлемента, при этом деформирует только рабочий тензоэлемент с сопротивлением Rðä, а компенсационный тензоэлемент с сопротивлением Rêä является в этом мосте не деформируемым элементом сравнения.
При отсутствии деформации на измерительном мосте сопротивление рабочего и компенсационного датчиков одинаково, поэтому напряжение от источника питания ~U в точке À и в точке Â будет одинаково, следовательно и сигнал Uâûõ равен нулю. Для балансировки параметров рабочего и компенсационного датчиков в схему вводятся уравновешивающие сопротивления R1 è R2 причем сопротивление R2 является регулируемым и подключается по схеме потенциометра.
При подаче деформирующей нагрузки на рабочий датчик его сопротивление меняется, поэтому в точках À è Â появляется разность потенциалов, которая фиксируется как выходной сигнал.
2.8.2. Магнитострикционный датчик
Схема магнитострикционного датчика представлена на рис. 18, а. Магнитострикционный датчик состоит из двух магнитопроводов 1, двух встречно намотанных обмоток возбуждения 2 и двух последова-
25

тельно намотанных обмоток управления 3. Обмотки возбуждения подключены к источнику переменного напряжения.
Âрезультате встречного подсоединения рабочих обмоток 2
âмагнитопроводе 1 этого датчика создаются встречные магнитные потоки, которые взаимно уравновешиваются. При отсутствии усилия, воздействующего на магнтопроводы 1, уравновешенные там магнитные потоки исключают появление ЭДС в обмотках управления 3.
Рис. 18. Схема магнитострикционного (а) и пьезометрического (б) датчиков
Принцип работы магнитострикционного датчика. Под действием усиления F возникает деформация магнитопроводов датчика, которая вызывает изменение магнитной проницаемости его материла. В результате этого нарушается равновесие встречных магнитных потоков в этих магнитопроводах, что приводит к появлению результирующего переменного магнитного потока, воздействующего на обмотки управления. Поэтому там появляется выходной сигнал, который пропорционален величине нагрузки F в зоне рабо- чей характеристики датчика.
Магнитострикционный датчик обладает обратным магнитострикционным эффектом, который заключается в том, что под действием переменного напряжения, поданного в обмотки управления, происходит деформация магнитопровода. Наиболее ярко этот эффект проявляется в механических колебаниях магнитопроводов трансформаторов.
26
2.8.3. Пьезометрический датчик
Чувствительным элементом пьезометрического датчика (рис. 18, б) является кристалл, обладающий пьезоэффектом. Суть этого эффекта состоит в том, что при деформации кристалла под действием усилия F на его поверхности появляется потенциал q. Величина этого потенциала пропорциональна некоторому коэффициенту E и усилию F, деформирующему кристалл, т. е.
q E·F. |
(9) |
Параметр E называется пьезометрической постоянной. Он характеризует способность пьезометрических материалов генерировать поверхностный потенциал q. К пьезометрическим материалам относятся: кристаллический кварц, титанат бария и сегнетова соль.
Пьезометрические материалы обладают обратным пьезометри- ческим эффектом, т. е. под действием потенциала, приложенного к поверхности кристалла, происходит его деформация. Этот эффект широко используют в цифровых системах управления для стабилизации тактовой частоты генераторов.
2.9. Датчики температуры
По принципу действия датчики температуры делятся на ртутные, биметаллические, сильфонные, термопары и термосопротивления.
2.9.1. Ртутные датчики температуры
Ртутный датчик температуры (рис. 19, а) состоит из колбы 1 или сосуда, изготовленного из изоляционного материала (кварцевое стекло) с расширенным нижним концом, в который впаивается общий контакт 2. В зауженной части колбы впаиваются контакты уровня температуры 3. Во внутреннюю полость сосуда помещается токопроводящая жидкость, с большим объемным температурным расширением.
Принцип работы ртутного датчика температуры. Под действием температуры жидкость во внутренней части колбы расширяется, при этом ее уровень в зауженной части колбы изменяется. Изменение уровня приводит к замыканию (или размыканию) уровневых
27

Рис. 19. Схема ртутного (а) и биметаллического (б) датчиков температуры
контактов с общим контактом, находящемся в расширенной части колбы. При этом сигнал дискретно меняет свое состояние, поэтому такой датчик является датчиком дискретного типа.
2.9.2. Биметаллический датчик температуры
Биметаллический датчик температуры (рис. 19, б) состоит из биметаллической пластинки 1, состоящей из склеенных (или склепанных) между собой двух пластин, выполненных из материалов с различным линейным температурным расширением. Один конец биметаллической пластины жестко закреплен, второй свободный конец связан с движком 2 потенциометра 3.
Принцип работы биметаллического датчика температуры. Под действием изменения температуры биметаллическая пластина удлиняясь изгибается в сторону пластины с меньшим линейным температурным расширением. В результате этого ее свободный конец перемещается по дуге вместе с движком потенциометра, вызывая изменения выходного сигнала.
2.9.3. Сильфонный датчик температуры
Сильфоном называется гофрированный герметичный сосуд, который под действием внутреннего давления может упруго изменять свой продольный линейный размер (аналогично пружине).
Сильфонный датчик (рис. 20, а) состоит из герметичного сильфона 1, жестко закрепленного одним из своих торцов. На другом свободном его торце закрепляется шток 2, связанный с движком потенциометра 3. Внутренняя полость сильфона заполняется
28

жидкостью или газом с большим объемным температурным расширением.
Принцип работы сильфонного датчика температуры: под действием изменения температуры, меняется объем жидкости или газа, помещенных во внут-
реннюю полость |
сильфона. |
Рис. 20. Схема сильфонного (а) |
||
В результате |
этого |
меняются |
||
и термопарного (б) датчиков |
||||
продольные размеры сильфона, |
температуры |
|||
что приводит |
к перемещению |
|
||
его свободного торца, связанного с движком потенциометра. Перемещение движка приводит к изменению выходного сигнала, снимаемого с потенциометра.
2.9.4. Термопара
Термопара относится к датчикам температуры генераторного типа. Термопара (рис. 20, б) состоит из двух металлических проводников 1, спаянных своими концами в точке 2. Проводники выполняются из металлов различного типа (медь — серебро; медь — золото; вольфрам — молибден; вольфрам — платина; железо — константан и др.)
Принцип работы термопары. При нагреве проводников в точке их спая происходит диффузия, т. е. переход электронов из одного проводника в другой, в результате чего на одном из проводников появляется избыток электронов, т. е. отрицательный потенциал, а на другом — недостаток электронов, т. е. положительный потенциал. Величина разности потенциалов проводников пропорциональна величине нагрева места их спая. Так как разность потенциалов сигнала небольшая, этот сигнал для практического применения требует дальнейшего усиления.
2.9.5. Термосопротивления
Датчики термосопротивления параметрические, т. к. их принцип действия основан на изменении сопротивления электрическому току при изменении температуры их нагрева. Термосопротивления бывают двух типов: металлические и полупроводниковые.
29
В качестве материалов в металлических термосопротивлениях используются: Fe, Cu, Ag, Au, Pt, Mo и др.
Особенностью работы металлических термосопротивлений является то, что под действием температуры их сопротивление увели- чивается, т. е. выходной сигнал датчика с увеличением температуры падает по уровню, что является недостатком этого типа датчиков.
Полупроводниковые термосопротивления, в отличие от металлических, имеют высокую первоначальную величину сопротивления электрическому току, которая уменьшается с увеличение их нагрева. Поэтому с ростом температуры выходной сигнал таких датчика увеличивается. Полупроводниковые термосопротивления называются термисторами и находят значительно большее применение как дат- чики температуры. Изготавливаются термисторы из окислов различ- ных металлов. При изготовлении таких датчиков их диэлектрические каркасы покрывают оксидными или сульфидными пленками.
2.10. Датчики давления
Датчики давления предназначены для замеров давления. Разли- чают датчики двух типов: для замера абсолютного и относительного давления.
По типу датчики давления делятся на жидкостные манометры, трубчатые манометры, сильфонные и мембранные датчики.
2.10.1. Жидкостный манометр
Жидкостный манометр, представленный на рис. 21, а как дат- чик давления, относится к манометрам разностного типа. Состоит этот манометр из сообщающегося сосуда 1 с расширенной частью,
âкоторой помещается поплавок 2, связанный через шток с движком потенциометра 3. В расширенную часть сосуда подается избыточ- ное давление Ð1 в то время как в зауженную часть сосуда подается пониженное давление Ð2. Внутренняя полость сосуда заполняется жидкостью с большой плотностью (обычно ртуть).
Принцип работы жидкостного манометра. Этот датчик замеряет относительное давление. При подаче избыточного давления
âрасширенную часть уровень жидкости в этой части понижается
èодновременно повышается в зауженной части пропорционально разности давлений P1 P2 . Разность уровней h всегда пропорцио-
30