

Строительная механика стержневых систем Часть 2
..pdfПользуясь принципом суперпозиций, по прил. 3 получим
|
ф |
|
p l2 |
|
1 |
u |
p l2 |
|
|
1 |
u . |
||||||
|
|
1 |
2 |
|
|
||||||||||||
|
B1 |
|
|
|
|
|
|
||||||||||
|
|
6 |
u |
6 |
|
u |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Bф 8 62 |
0,5 0,5(1 |
0,5) 6 62 |
5 |
1 |
1 |
5 |
|
27,167. |
|||||||||
1 |
6 |
|
|
|
|
|
6 |
6 |
6 |
|
|
6 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||||
Для простой балки 2-го пролета основной системы находим А2ф и В2ф по первому случаю прил. 3.
Аф Вф |
ql3 |
|
2 85,333. |
||
2 |
2 |
24 |
|
|
|
Для простой балки 3-го пролета используем случай 2 и случай 8 прил. 3.
ф |
ql3 |
|
2 |
|
2 |
|
ml |
|
2 |
|
|
|
|
|
|
|
|
|
|||||
|
3 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|||||||||
А3 |
24 u1 (2 |
u1 ) |
|
|
6 |
|
1 3 2 |
, |
|
|
|
|
|
|
|
|
|||||||
Аф |
4 83 |
0,252 (2 0,25)2 |
|
|
|
|
|
|
|
|
|
||||||||||||
3 |
24 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
12 8 |
|
1 3 |
0,52 20,333, |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ql3 |
|
|
|
|
ml |
|
|
|
|
|
|
|
|
|
||||
|
|
B3ф |
243 u12 2 u12 |
|
|
3 |
1 3u22 , |
|
|
|
|
|
|
||||||||||
|
|
|
6 |
|
|
|
|
|
|
|
|||||||||||||
|
|
B3ф |
4 83 |
0,252 |
2 0,252 |
12 8 |
1 3 0,52 6,333. |
||||||||||||||||
|
|
|
|
|
|
24 |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
Получим систему уравнений |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 6 |
|
|
|
|
|
1 |
|
|
||
|
|
5 6 2М1 (6 4) М2 |
27,167 1 85,333 |
2 |
, |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 2М2 (4 2) |
М |
|
|
|
|
85,333 |
1 |
20,333 |
1 |
, |
||||||||||
|
|
М1 |
3 2 6 |
2 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
2 2М3 2 |
6 6,333 1 . |
|
|
|
|
|
|
|
|
|||||||||||
|
|
М2 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
91
Иначе
5М1 М2 97,25,2М1 6М2 М3 143,25,М2 2М3 4,75.
Решив систему уравнений, получим
М1 15,45;М2 19,99;М3 7,62.
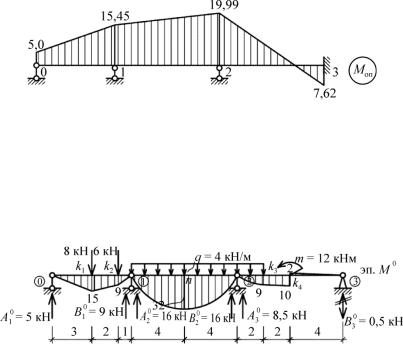
3. Построим эпюру опорных моментов (рис. 11.12)
Рис. 11.12
4. Для построения окончательной эпюры моментов построим относительно основной системы грузовую эпюру моментов (рис. 11.13), а для построения эпюры поперечных сил – грузовую эпюру поперечных сил (рис. 11.14).
Рис. 11.13
92
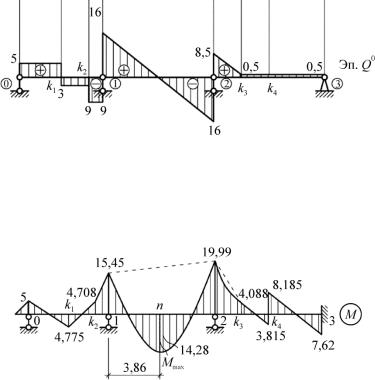
Рис. 11.14
5. Строим окончательную эпюру моментов (рис. 11.15) по формулам (11.9) и (11.10).
Рис. 11.15
Определиммоменты в сечениях пролетов по формуле (11.10):
Мk1 15 |
15,45 3 |
5 3 |
4,775, |
||
|
|
6 |
|
6 |
|
Мk 2 9 |
15,45 5 |
5 1 4,708, |
|||
|
|
6 |
|
6 |
|
Мп 32 |
19,99 4 |
|
15,45 4 14,28. |
||
|
|
8 |
|
8 |
|
Мk 3 9 |
7,62 2 19,99 6 |
4,088, |
|||
|
|
8 |
|
8 |
|
|
|
93 |
|
|
|
Мkлев4 |
10 7,62 4 |
19,99 4 |
3,815, |
||||
|
|
8 |
|
|
8 |
|
|
Мkправ4 |
2 |
7,62 4 |
|
19,99 4 |
8,185. |
||
|
|
8 |
|
|
8 |
|
|
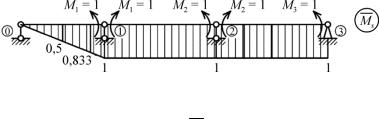
6. Выполним деформационную проверку окончательной эпюры моментов. Для этого построим суммарную эпюру единичных моментов относительно основной системы от неизвестных опорных моментов, равных единице (рис. 11.16).
Рис. 11.16
l |
MEJS M dx 0. Вычисление инте- |
Проверяем равенство 0 |
гралов выполняем по правилу Верещагина и формулам умножения трапеции на трапецию (см. гл. 6, Ч. 1)
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MEJS M dx |
1 |
|
63 5 0,5 2(4,775 0,5) |
|
|
||||||||||||||||||
0 |
|
|
|
||||||||||||||||||||||
EJ |
|
|
|||||||||||||||||||||||
|
1 |
|
2 |
4,775 0,833 4,708 0,5 2(4,775 0,5 4,708 0,833) |
|||||||||||||||||||||
EJ 6 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1 |
|
1 |
4,708 1 15,45 0,833 2(4,708 0,833 15,45 1) |
|
|||||||||||||||||||
|
EJ 6 |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1 |
|
|
|
15,45 19,99 8 1 |
1 |
4 83 |
1 |
1 |
|
19,99 4,088 2 1 |
|||||||||||||
|
|
|
|
2EJ |
12 |
4EJ |
|||||||||||||||||||
|
|
2EJ |
|
2 |
|
|
|
|
|
2 |
|
|
|||||||||||||
|
1 |
|
|
|
4 23 |
1 |
|
1 |
|
4,088 3,815 |
2 |
1 |
|
1 |
|
|
8,185 7,62 |
4 1 |
|
||||||
4EJ |
12 |
4EJ |
|
2 |
|
|
4EJ |
2 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
87,1 87,1 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Деформационная проверка выполняется.
94
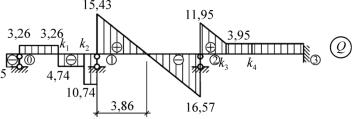
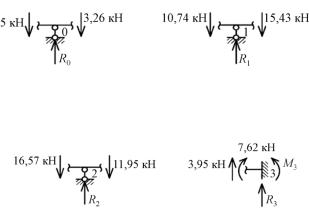
7. Строим эпюру поперечных сил (рис. 11.17). По формуле (11.12)
Q0 5 15,45 ( 5) 5 1,742 3,26 кН; 6
Qkлев1 Q0 3,26 кН;
Qправ Qлев 3 15,45 ( 5) |
4,74 кН; |
||||||
k |
k |
2 |
|
|
6 |
|
|
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Qправ |
Qлев 9 15,45 ( 5) |
10,74 кН; |
|||||
k2 |
1 |
|
|
6 |
|
|
|
|
|
|
|
|
|
||
Qправ 16 19,99 ( 15,45) |
16 0,5675 15,43 кН; |
||||||
1 |
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
Qлев |
16 |
19,99 ( 15,45) |
16,57 кН; |
||||
|
|||||||
2 |
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
Qправ 8,5 7,62 ( 19,99) |
8,5 3,45 11,95 кН; |
||||||
2 |
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
Q 0,5 7,62 ( 19,99) 3,95 кН; |
|||||||
|
k |
|
|
8 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Qk |
Qk Q3 |
3,95 кН. |
|||
|
|
3 |
4 |
|
|
|
|
Рис. 11.17
95
Во втором пролете найдем сечение, в котором эпюра поперечных сил пересекает ось балки, а на эпюре моментов макси-
мум: |
х 15,43 |
3,86 м. |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
Тогда |
|
|
|
|
|
|
|
|
Мхмах3,86 |
Мх0 3,86 |
М2 х M1 (l2 х) , |
|
||
|
|
|
|
l2 |
|
l2 |
|
|
|
Мх0 3,86 16 3,86 4 |
3,862 |
31,96 |
|
||
и |
|
2 |
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Мхмах3,86 31,96 |
19,99 3,86 |
15,45(8 3,86) |
14,32 |
|||
|
|
|
8 |
|
|
8 |
|
8. Определим реакции опор. Вырежем опорные узлы и рассмотрим их равновесие.
у 0, |
|
R0 8,26 кН, |
R1 26,17 кН, |
R2 28,52 кН, |
R3 3,95 кН |
|
М3 7,62 кН м |
9. Для выполнения статической проверки эпюр и реакций опор рассмотрим равновесие всей системы сил, действующей на балку (рис. 11.18)
96

Рис. 11.18
у 0:8,26 26,17 28,52 3,95 5 8 6 4(8 2) 0; 62,95 62,95 0 ;0 0.
Mk3 0:8,26(6 8 2) 26,17(8 2) 28,52 2 3,95 6
7,62 12 4102 6(1 8 2) 8(3 8 2) 5(1 6 8 2) 0; 2
474,6 474,6 0 ;0 0.
11.3. Расчет неразрезной балки методом перемещений
Рационально методом перемещений определить опорные моменты, а далее расчет выполнить так, как показано в методе сил (см. подразд. 11.2.3–11.2.5).
Рассмотрим неразрезную балку на рис. 11.9 и покажем основную систему метода перемещений (рис. 11.19). Вместо отброшенной консоли учтем опорный момент в нагрузке. Степень
кинематической неопределимости равна 2, т.е. пкин 2 . Линей-
ные перемещения отсутствуют. В жесткие узлы вводим фиктивные заделки. Неизвестными являются углы поворота. Основная система метода перемещений (см. рис. 11.19) есть совокупность статически неопределимых балок.
Рис. 11.19
97
Выразим погонные жесткости каждого пролета по формуле
iab ElJаb .
аb
Для первого пролета i1 E6J . Примем EJ = 1. Тогда i1 16 ,
i2 2EJ8 14 , i3 4EJ8 12.
Составим в общем виде канонические уравнения метода перемещений:
r11Z1 r12 Z2 |
R1Р 0, |
(11.14) |
|
|
|
r21Z1 r22 Z2 R2Р 0. |
|
|
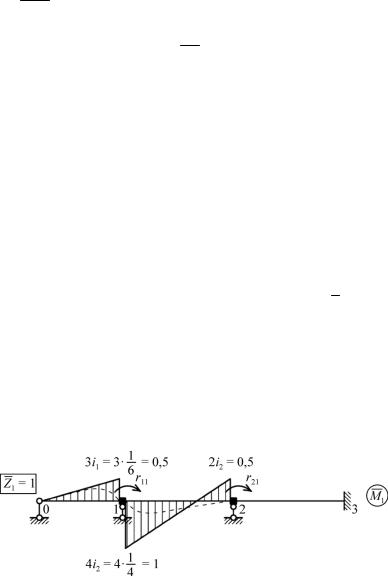
Для определения всех реактивных усилий в дополнительных связях рассмотрим единичные и грузовое состояния основной системы (рис. 11.20, 11.21, 11.22) и построим эпюры изгибающих моментов.
В первом единичном состоянии угол поворота Z1 1. Это
означает, что каждый стержень, примыкающий к узлу 1, получает на этом конце угол поворота, равный единице. Все остальные связи остаются неподвижными, деформируются только балки, сходящиеся в узле 1. Для такой схемы воздействия для каждой балки основной системы найдем в прил. 1 и 2 концевые моменты и построим эпюру моментов (см. рис. 11.20)
Рис. 11.20
98
В этом единичном состоянии в дополнительных связях возникают реактивные моменты r11 и r21 , принятые положи-
тельными, т.е. совпадающими с направлениями перемещений (углов поворота) соответствующих связей. Эти реакции определяем из уравнения равновесия моментов в узлах балки.
Отсюда r11 3i1 4i2 1,5 и r21 2i2 0,5.
Найденные реактивные моменты есть коэффициенты при Z1 канонических уравнений (11.14).
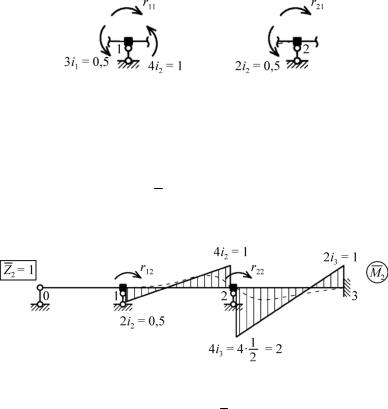
Из второго единичного состояния и единичной эпюры моментов от угла поворота Z2 1 (см. рис. 11.21) найдем коэффи-
циенты при Z2 системы уравнений.
Рис. 11.21
Из равновесия узлов на эпюре M 2 имеем
r12 2i2 0,5; r22 4i2 4i3 1 2 3.
Рассмотрим грузовое состояние основной системы и построим эпюры моментов для каждой статически неопределимой балки (см. рис. 11.22) по прил. 1 и 2.
99
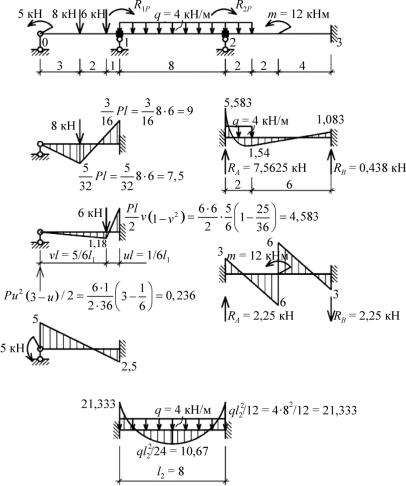
Рис. 11.22
Из равновесия узлов грузовой эпюры моментов найдем реактивные моменты R1P и R2P :
100