

Идентификация систем управления учебное пособие
..pdfМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Пермский национальный исследовательский политехнический университет»
Н.В. Андриевская, Н.Н. Матушкин, А.А. Южаков
ИДЕНТИФИКАЦИЯ СИСТЕМ УПРАВЛЕНИЯ
Утверждено Редакционно-издательским советом университета
в качестве учебного пособия
Издательство Пермского национального исследовательского
политехнического университета
2012
УДК 681.51
ББК 30
А65
Рецензенты:
кандидат технических наук С.В. Березняков (ОАО «СТАР»);
кандидат технических наук, доцент Т.С. Леготкина (Пермский национальный исследовательский политехнический университет)
Андриевская, Н.В.
А65 Идентификация систем управления : учеб. пособие / Н.В. Андриевская, Н.Н. Матушкин, А.А. Южаков. – Пермь : Изд-во Перм. нац. исслед. политехн. ун-та, 2012. – 170 с.
ISBN 978-5-398-00949-1
Рассмотрены основные положения теории идентификации систем: структурная и параметрическая идентификация; линейный регрессионный анализ, идентификация нелинейных систем и методы оценивания параметров и состояния. Приведены методы исследования идентификационных моделей. Рассмотрены возможности пакета MatLab для построения и анализа моделей идентификации. Даны примеры идентификации гидромеханических подсистем систем управления двигателями летательных аппаратов. Приведены контрольные вопросы и задания для самостоятельного изучения.
Предназначено для магистров профиля подготовки 16070052.68 «Информационные технологии в разработке двигателей летательных аппаратов».
УДК 681.51
ББК 30
ISBN 978-5-398-00949-1 |
© ПНИПУ, 2012 |
ОГЛАВЛЕНИЕ |
|
ВВЕДЕНИЕ............................................................................................................. |
5 |
1. ПОСТРОЕНИЕ МОДЕЛИ |
|
НА ОСНОВЕ МЕТОДОВ ИДЕНТИФИКАЦИИ............................................. |
8 |
1.1. Основные понятия теории идентификации .............................................. |
8 |
1.2. Классификация методов идентификации................................................ |
16 |
1.3. Структурная идентификация.................................................................... |
17 |
1.4. Параметрическая идентификация............................................................ |
21 |
1.4.1. Схемы реализации параметрической идентификации. ................ |
21 |
1.4.2. Классификация моделей объектов управления............................. |
24 |
1.4.3. Математическое описание основных классов моделей................ |
29 |
1.4.4. Управляемость, наблюдаемость |
|
и идентифицируемость систем....................................................... |
36 |
1.4.5. Идентификация линейной регрессионной модели....................... |
38 |
1.4.6. Идентификация динамических систем .......................................... |
46 |
1.4.7. Идентификация нелинейных систем.............................................. |
49 |
1.5. Совместное оценивание параметров и состояния.................................. |
53 |
1.6. Контрольные вопросы и задания ............................................................. |
65 |
2. ИССЛЕДОВАНИЕ ИДЕНТИФИКАЦИОННЫХ МОДЕЛЕЙ..................... |
67 |
2.1. Постановка эксперимента......................................................................... |
67 |
2.2. Оценивание адекватности моделей ......................................................... |
70 |
2.3. Программные средства идентификации и моделирования систем....... |
80 |
2.3.1 Виды моделей пакета System Identification Toolbox ...................... |
81 |
2.3.2. Использование пакета System Identification Toolbox |
|
для построения модели системы.................................................... |
83 |
2.3.2.1. Обработка данных при построении |
|
модели объекта.................................................................... |
84 |
2.3.2.2. Оценивание статистических и частотных |
|
характеристик исходных данных...................................... |
88 |
2.3.3.3. Параметрическое оценивание данных.............................. |
95 |
2.3.3.4. Функции преобразования моделей.................................. |
106 |
2.3.3.5. Проверка адекватности модели....................................... |
110 |
2.3.3.6. Анализ модели технического объекта............................ |
114 |
2.3.3.7. Основные результаты идентификации........................... |
124 |
2.4. Контрольные вопросы и задания ........................................................... |
126 |
3
3. РАЗРАБОТКА МОДЕЛЕЙ СУ ДЛА НА ОСНОВЕ |
|
МЕТОДОВ ИДЕНТИФИКАЦИИ................................................................. |
128 |
3.1. Применение идентификационных моделей |
|
при проектировании СУ ДЛА................................................................. |
128 |
3.2. Формализация СУ ДЛА .......................................................................... |
133 |
3.2.1. Выбор вида математической модели |
|
промышленного насоса-регулятора............................................. |
137 |
3.2.1.1. Построение поэлементных моделей................................ |
138 |
3.2.1.2. Математические модели функциональных |
|
элементов насоса-регулятора........................................... |
143 |
3.3. Выбор метода идентификации............................................................... |
150 |
3.3.1. Наблюдаемость и идентифицируемость подсистем |
|
насоса-регулятора.......................................................................... |
151 |
3.3.2. Оценивание параметров модели насоса-регулятора................... |
153 |
3.3.2.1. Идентификация параметров модели в точках |
|
линеаризации..................................................................... |
153 |
3.3.2.2. Аппроксимация нелинейных коэффициентов................ |
156 |
3.4. Контрольные вопросы и задания ........................................................... |
160 |
ЗАКЛЮЧЕНИЕ .................................................................................................. |
161 |
СПИСОК ЛИТЕРАТУРЫ.................................................................................. |
162 |
Приложение 1. Основные функции System Identification Toolbox ................ |
165 |
Приложение 2. Программа построения модели технического объекта........ |
168 |
4
ВВЕДЕНИЕ
Учебное пособие «Идентификация систем управления» предназначено для студентов подготовки профиля 16070052.68 «Информационные технологии в разработке двигателей летательных аппаратов».
Дисциплина «Идентификация систем управления» относится к вариативной части цикла профессиональных дисциплин и является обязательной при освоении основной образовательной программы высшего профессионального образования (ООП ВПО).
Развитие авиадвигателестроения связано с дальнейшим усложнением силовых установок для летательных аппаратов различных классов. Для современных авиационных двигателей характерны широкий диапазон изменения режимов работы и условий полета, увеличение числа регулируемых параметров и регулирующих органов, большая вероятность возникновения нештатных режимов. Это приводит к усложнению программ и алгоритмов управления, ужесточению требований к системам управления, которые должны обеспечивать не только высокое качество управления в широком диапазоне изменений условий полета, режимов работы, но и прогнозирование и управление силовой установкой в критических ситуациях. Дальнейшее совершенствование методов проектирования высокоэффективных систем управления силовыми установками летательных аппаратов невозможно без разработки достоверных моделей как самого двигателя, так и систем егоуправления.
Разработка математических моделей невозможна без применения современных методов – методов идентификации. Кроме того, идентификационный подход к построению математических моделей расширяет область применения данных моделей, а именно при настройке гидроагрегатов, для диагностики систем управления двигателем летательного аппарата (СУ ДЛА) вэксплуатации.
Целью изучения дисциплины «Идентификация систем управления» является формирование навыков использования методик и аппа- ратно-программных средств моделирования, идентификации и технического диагностирования динамических систем управления.
Предметом освоения дисциплины являются:
•основные принципы создания современных систем автоматического управления;
•математические методы описания систем автоматического управления;
5
•основные подходы к решению задачи идентификации;
•основные подходы к решению задачи структурной идентифика-
ции;
•основные методы параметрической идентификации;
•способы оценивания адекватности расчетных моделей исходным объектам;
•основные методы одновременного оценивания параметров и состояния;
•способы применения методов идентификации в адаптивных системах.
Трудоемкость дисциплины составляет 108 часов, из них лекции – 14 часов, практические занятия – 12 часов. Основной вид занятий при изучении данной дисциплины – самостоятельная работа. В связи с этим в данном учебном пособии представлены все разделы «Идентификации систем управления», включая материалы для самостоятельного изучения,
атакже вопросы и задания для самоконтроля.
Теоретический материал, изложенный в учебном пособии, прорабатывается в процессе выполнения заданий практических занятий и в ходе выполнения индивидуальных заданий по различным видам самостоятельной работы студента.
В процессе освоения данной дисциплины формируются следующие профессиональные профильно-специализированные компетенции (ПСК):
•способность использовать современные информационные технологии при разработке проектов систем управления двигателями летательных аппаратов;
•готовность применять современные аппаратные средства и программное обеспечение для проектирования систем управления двигателями летательных аппаратов.
В результате освоения дисциплины обучающийся должен демонстрировать следующие результаты:
Знать:
•основные принципы функционирования, статические и динамические характеристики СУ ДЛА;
•особенности применения методов идентификации при проектировании СУ ДЛА;
•основные принципы и методы структурной и параметрической идентификации, основные подходы к совместному оцениванию параметров и состояний;
6
•методы планирования эксперимента, методы оценки адекватности моделей;
•прикладные программы идентификации;
•программные инструментальные средства моделирования СУ ДЛА: MatLab, LabView, прикладные программные инструментальные средства и пакеты планирования эксперимента.
Уметь:
•проводить формальное описание процесса функционирования СУ ДЛА и протекающих в них процессов;
•систематизировать информацию о состоянии объекта или системы управления, выявлять основные/значимые параметры объектов и систем управления;
•осуществлять выбор наилучшегометода и модели идентификации;
•использовать методы идентификации объектов управления при проектировании СУ ДЛА;
•осуществлять планирование эксперимента и оценивать адекватность модели;
•осуществлять оптимальный выбор программных средств для идентификации и моделирования СУ ДЛА.
Владеть:
•навыками постановки эксперимента;
•методикой оценки адекватности идентификационных моделей;
•методами формализации СУ ДЛА в рамках задачи идентифика-
ции;
•методикой структурной и параметрической идентификации;
•опытом применения методов идентификации при проектировании СУ ДЛА;
•типовыми программными инструментальными средствами, используемыми при идентификации СУ ДЛА.
Структура учебного пособия организована по модульному принципу. Раздел учебного пособия соответствует модулю дисциплины.
Приведены примеры, контрольные вопросы и задания, которые позволяют студентам самостоятельно оценить уровень освоения тео-
ретического материала, подготовиться к практическим занятиям и к выполнению индивидуальных заданий в рамках самостоятельной работы по дисциплине.
7
1.ПОСТРОЕНИЕ МОДЕЛИ НА ОСНОВЕ МЕТОДОВ ИДЕНТИФИКАЦИИ
1.1.Основные понятия теории идентификации
Внастоящее время проблемы, связанные с созданием математи-
ческих моделей объектов технологических процессов, экономики
иживой природы, формируют одно из основных направлений науки
итехники – моделирование.
Это объясняется тем, что математические модели объектов широко применяются как при создании систем управления этими объектами, так и при их эксплуатации.
В данном учебном пособии рассматриваются только модели технических объектов и систем. Объекты и системы представляют собой совокупность материальных тел, находящихся в непрерывном взаимодействии друг c другом и с окружающей средой. Построение математической модели объекта может производиться несколькими методами: аналитическим, экспериментальным и экспериментально-аналитическим [1–3].
Аналитический метод предусматривает получение математического описания объекта на основе законов физики, механики, химии и т.д. Такой подход дает положительный результат, если рассматриваемый объект достаточно прост по структуре и хорошо изучен. Если же объект изучен недостаточно или же настолько сложен, что аналитическое описание его математической моделью практически невозможно, прибегают к экспериментальным методам, суть которых сводится к статистической обработке технологических данных. При экс- периментально-аналитическом методе априорная модель, полученная аналитическим путем, уточняется в соответствующих экспериментах.
Взаимодействие объекта с окружающей средой можно представить в виде рисунка (рис. 1.1).
Совокупность таких воздействий окружающего мира на объект можно разделить на две группы в соответствии с характером влияния среды на переменные состояния объекта. В первую группу входят те воздействия, которые в точке приложения изменяют переменные состояния аддитивно. Это означает, что сигналы, пропорциональные этим воздействиям, суммируются с сигналами, пропорциональными соответствующим переменным состояния.
8
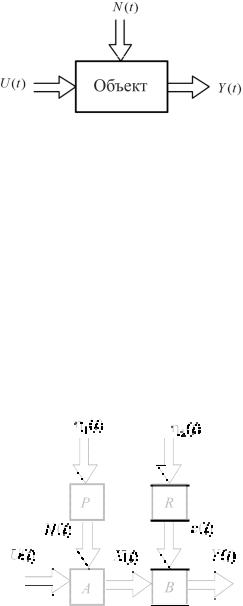
Рис. 1.1. Структурная схема объекта управления
Эти воздействия называют внешними. Среди внешних воздействий выделяют: U (t) – входные воздействия, N(t) – возмущающие воздействия.
Вторая группа воздействий внешней среды изменяет переменные состояния объекта косвенно, обычно неаддитивно. Эти воздействия приводят к изменению оператора объекта (системы) А, под которым понимают закон преобразования входных воздействий в выходные переменные объекта. Такие воздействия называются операторными.
Поведение объекта описывается вектором Y (t).
Схему взаимовоздействия с окружающей средой можно представить более подробно (рис. 1.2).
Рис. 1.2. Структурная схема модели объекта управления
На схеме приняты следующие обозначения:
• U (t), Y (t) – наблюдаемые входные и выходные сигналы. Они
могут быть детерминированными или случайными, могут быть смесью (обычно аддитивной) детерминированной и случайной состав-
9
ляющих. Входные сигналы могут специально подаваться в систему для идентификации (активный эксперимент), а могут существовать в системе как управляющие или возмущающие воздействия (пассивный эксперимент);
•X (t) – ненаблюдаемые сигналы, которые оцениваются косвенно по сигналу Y (t) , полученному в результате преобразования в объекте оператором B ;
•η1(t), η2 (t) – ненаблюдаемые помехи, являющиеся, как правило,
случайными процессами типа белого шума, в некоторых случаях содержащие детерминированные совпадающие;
• N(t), ε(t) – чаще ненаблюдаемые, обычно коррелированные во
времени случайные сигналы, в некоторых случаях содержащие детерминированные составляющие;
• A, B, P, R – операторы, в некоторых случаях их вид не известен, в других известен, но не известны параметры.
Согласно приведенной структурной схеме модели объекта (см. рис. 1.1) основными задачами идентификации являются следующие:
1. Задача нахождения характеристик (параметров) объекта.
По известным наблюдаемым переменным U (t), Y (t) требуется определить операторы (или параметры операторов) A, B. Часто одновременно с определением параметров A, B требуется установить параметры операторов P, R, преобразующих ненаблюдаемые белые шумы η1(t), η2 (t) в ненаблюдаемые сигналы N(t), ε(t).
2. Задача оценивания переменных состояния.
Состояние объекта характеризуется вектором переменных состояния X (t) , вектором, однозначно определяющим все его характеристики. По известным наблюдаемым сигналам U (t), Y (t) при известных операторах A, B, P, R с известными параметрами требуется определить (оценить) ненаблюдаемый сигнал X (t) . Иногда возникает задача совместного оценивания параметров и состояния.
3. Задача генерации случайных сигналов с заданными характеристиками или определения характеристик случайных сигналов.
По наблюдаемым переменным N(t), ε(t) требуется определить оператор (или параметры оператора) P, R.
10