

Идентификация систем управления учебное пособие
..pdfGmlog=9,2951, >>Gmlog=20*log10(Gm) – для непрерывной модели:
Gmlog = 10.5377.
Как видно, определение запасов устойчивости последним способом позволяет точнее вычислять эти значения, чем на графиках частотных характеристик. Анализ частотных характеристик показывает, что модели zzn4s и sysn4s являются устойчивыми с соответствующими запасами устойчивости по амплитуде. Запас устойчивости по фазе равен бесконечности.
Этот вывод подтверждается также комплексной амплитуднофазовой характеристикой АФХ (рис. 2.18), так как годограф АФХ не пресекает точку комплексной плоскости с координатами (–1, j0).
Для построения АФХ необходимо воспользоваться командой
>>nyquist(zzn4s,sysn4s).
Определить устойчивость моделей можно с помощью карты нулей и полюсов по расположению нулей моделей относительно окружности с единичным радиусом на комплексной плоскости, как это показано на рис. 2.18.
Рис. 2.18. Годограф АФХ для непрерывной и дискретной моделей
121

Построить карту нулей и полюсов моделей можно также с помо-
щью команд pzmap(zzn4s,sysn4s) или pzmap(zn4s,sn4s).
Следует напомнить, что выходной параметр объекта автоматизации (в нашем случае температура) y(t) складывается из двух составляющих: выхода объекта y(t) и аддитивной помехи e(t), вызванной влиянием внешних факторов на объект автоматизации. Последняя составляющая является чисто случайной величиной и характеризуется статистическими параметрами. В ходе идентификации были получены зависимости, определяющие составляющую e(t) и корреляционные зависимости между e(t) и выходом объекта y(t):
e(t) = H1(z)[ y(t) −W (z)u(t)].
Спомощью команды plot(e) строится график изменения е(t)
иопределяются основные статистические характеристики помехи
(рис. 2.19).
Рис. 2.19. График аддитивной модели e(t)
Для получения статистических характеристик необходимо в строке меню графика в позиции Tools выбрать опцию Data statistics. В результате выполнения команды появится окно, в котором будут указаны основные статистические характеристики случайного процесса изменения во времени e(t) (рис. 2.20):
•min и max – минимальное и максимальное значение помехи;
•mean – арифметическое среднее значение;
•median – медиана процесса;
•std – среднеквадратическое отклонение;
•range – диапазон изменения помехи от минимального до максимального значения.
122
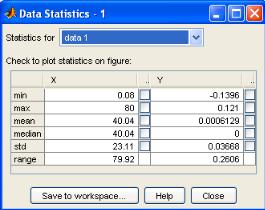
Рис. 2.20. Статистические характеристики e(t)
Для решения задач анализа и синтеза системы важно знать ответ на вопрос, обладает ли объект свойством управляемости и наблюдаемости.
В пакете Control System Toolbox имеются функции: ctrb, формирующая матрицу управляемости, и obsv, формирующая матрицу наблюдаемости.
Для того чтобы воспользоваться этими функциями, необходимо вычислить матрицы А, В, С, D с помощью команды
>>[А,В,C,D]=ssdata(sn4s)
A =
−0.2480 −2.0709 2.2220 3.2929 −1.3184 6.3825 1.8425 −16.7833 −15.4959
B =
0.0328 −0.0287 −0.8169
C =
18.0931 0.0789 −0.1539
D = 0.
Вычисление матрицы управляемости: >>My=ctrb(A,В)
123
|
M у = |
|
0.0328 |
−1.7639 |
40.2663 |
−0.0287 |
−5.0683 |
85.1294 |
−0.8169 |
13.2012 |
−122.7502 |
>>n=rank(U) n = 3
Вычисление матрицы управляемости:
>>Mн=obsv(A,C)
Mн =
18.0931 0.0789 −0.1539 −4.5114 −34.9894 43.0912 −34.7007 −667.7434 −901.0786
>>n=rank(N) n = 3
Таким образом, для исследуемой модели объекта размерность вектора состояний, определяемая размером матриц А и С, равна трем и ранг матриц наблюдаемости и управляемости также равен трем, это позволяет заключить, что объект автоматизации является вполне управляемым и наблюдаемым.
2.3.3.7. Основные результаты идентификации
Идентификация распылительной сушилки проводилась с целью получения модели объекта и исследования его характеристик.
Врезультате проведенного эксперимента был получен массив
данных, состоящий из 1000 значений входного параметра распылительной сушилки – расхода газа, м3/ч, и 1000 значений выходного параметра – температуры отходящих газов, °С, измеренных через временные промежутки 0,08 с.
Входе идентификации были получены следующие результаты:
• обработаны и преобразованы данные в единый файл, содержащий необходимую информацию о входных и выходных параметрах объекта, их значениях и размерностях измерения; получены графические зависимости изменения температуры отходящих газов от расхода горючего газа на входе распылительной сушилки;
124
•проведено непараметрическое оценивание исходных данных для определения статистических характеристик массивов исходных данных;
•в результате параметрического оценивания экспериментальных данных, проведенного с целью определения параметров модели заданной структуры путем минимизации выбранного критерия качества модели, были получены различные структуры и виды моделей распылительной сушилки:
−модель авторегрессии,
−модель авторегрессии с дополнительным входом,
−модель авторегрессии скользящего среднего,
−модель «вход–выход»,
−модель Бокса-Дженкинса,
−модель для переменных состояния;
•проверка адекватности моделей показала, что наилучшей степенью адекватности (89,51 %) обладает модель для переменных состояния. Получены значения автокорреляционной функции ошибок процесса и значения взаимнокорреляционной функции между остаточными ошибками и выходами объекта вместе с соответствующими 99%-ми доверительными интервалами;
•проведенное преобразование моделей позволило получить вид передаточных функций распылительной сушилки в дискретном и непрерывном видах, необходимых для дальнейшего анализа и синтеза системы:
W (z) = |
−0,001236z2 +0,006901z +0,06318 |
, |
|||
|
z3 −1,773z2 +1,101z −0,2554 |
||||
|
|
|
|||
W (s) = |
0,7165s2 + 22,12s + |
264,4 |
; |
|
|
s3 +17,06s2 +134,4s |
|
|
|||
|
|
+ 279,1 |
|
||
•проведенный анализ модели распылительной сушилки позволил определить основные статические и динамические характеристики объекта автоматизации;
•анализ управляемости и наблюдаемости объекта показал, что распылительная сушилка является вполне управляемой и наблюдаемой. На нее можно подавать управляющие воздействия для перевода
ееиз одного начального состояния в произвольное заранее заданное конечное состояние, и для этого заранее заданного управляющего воз-
125
действия можно определить (измерить) начальное состояние вектора переменных состояния.
Программа построениямодели системы приведена в приложении 2.
2.4.Контрольные вопросы и задания
1.Когда возможно проведение активного эксперимента при исследовании идентификационных моделей СУ ДЛА?
2.Объясните причины незначимости коэффициента множественной корреляции и предложите алгоритм дальнейшего исследования модели.
3.Дисперсия остатка Soc2 т сопоставима с дисперсией регрессии
SR2 . Какие выводы по адекватности модели можно сделать?
4.В результате дополнительных опытов в рабочей точке дисперсия случайной ошибки возросла. Какие выводы по адекватности модели можно сделать?
5.Проверка гипотезы о значимости отдельных коэффициентов регрессионной модели показала, что большинство из них не значимы. Какие выводы можно сделать о модели в целом?
6.С помощью каких функций System Identification Toolbox можно осуществить структурную идентификацию на этапе выделения объекта из среды?
7.Можно ли применять ARMAX-модель для детерминированных
объектов?
8. Оценить параметры моделей y |
m |
= a +a x и y |
m |
= a |
+ a x + a |
2 |
x2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
0 |
1 |
|
||||||
на основе следующих измерений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x |
|
|
0,0 |
|
|
0,2 |
|
|
0,4 |
|
|
|
0,6 |
|
|
|
|
0,8 |
|
|
|
1,0 |
|
|
||
y |
|
|
0,000 |
|
0,363 |
|
|
0,659 |
|
|
0,902 |
|
|
|
1,101 |
|
|
1,264 |
|
|||||||
Проверить адекватность моделей, используя серию дополнитель- |
||||||||||||||||||||||||||
ных опытов в точке 0,8: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x |
0,8 |
|
|
0,8 |
|
|
0,8 |
|
|
|
|
0,8 |
|
|
|
0,8 |
|
|
0,8 |
|
|
|||||
y |
1,000 |
|
|
1,134 |
|
|
1,112 |
|
|
|
|
1,056 |
|
|
0,955 |
|
1,010 |
|
||||||||
9. Оценить параметры моделей |
|
y |
m |
= a |
+ a x2 |
|
и |
y |
m |
= a x + a |
2 |
x3 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
|
1 |
|
|||||
на основе следующих измерений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x |
|
0,0 |
|
|
0,2 |
|
|
0,4 |
|
|
|
|
0,6 |
|
|
|
|
0,8 |
|
|
1,0 |
|
|
|||
y |
|
0,000 |
|
|
0,363 |
|
|
0,659 |
|
|
|
0,902 |
|
|
|
1,101 |
|
|
1,264 |
|
||||||
126 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проверить адекватность моделей, используя серию дополнительных опытов в точке 0,8:
x |
0,8 |
0,8 |
0,8 |
0,8 |
0,8 |
0,8 |
y |
1,000 |
1,134 |
1,112 |
1,056 |
0,955 |
1,010 |
10.Составить программу для расчета задания 8 из раздела 1 в па-
кете MatLab средствами System Identification Toolbox.
11.Составить программу для расчета задания 9 из раздела 1 в па-
кете MatLab средствами System Identification Toolbox.
12. Составить |
программу |
для |
расчета |
задания |
11 |
из |
раздела |
1 |
в пакете MatLab средствами System Identification Toolbox. |
|
|
||||||
13. Составить |
программу |
для |
расчета |
задания |
12 |
из |
раздела |
1 |
в пакете MatLab средствами System Identification Toolbox. |
|
|
||||||
127
3. РАЗРАБОТКА МОДЕЛЕЙ СУ ДЛА НА ОСНОВЕ МЕТОДОВ ИДЕНТИФИКАЦИИ
3.1. Применение идентификационных моделей при проектировании СУ ДЛА
Непрерывное стремление к улучшению характеристик двигателей летательных аппаратов приводит к необходимости дальнейшего совершенствования их систем управления. Для условий функционирования современных СУ ДЛА характерны высокая интенсификация процессов управления, широкий диапазон изменения условий полета и режимов работы силовой установки, потребность в одновременном управлении несколькими газодинамическими параметрами или комплексом параметров, характеризующих режимы работы двигателя. Все это характеризует современные ДЛА как сложнейшие объекты управления [1, 2]. Максимальная эффективность функционирования ДЛА может быть достигнута применением систем управления, которые необходимо разрабатывать с учетом современных требований и методов оптимизации и синтеза систем, а также особенностей технологии систем автоматизированного проектирования СУ ДЛА[31, 32].
Сложность решения задачи проектирования СУ ДЛА заключается
втом, что:
•система относится к классу многосвязных, или многомерных, систем, так как состоит из значительного количества взаимосвязанных
ивзаимодействующих достаточно сложных подсистем;
•СУ ДЛА является многорежимной системой, так как количество подсистем и характер их взаимодействия в процессе функционирования могут меняться; кроме того, отдельные подсистемы могут функционировать независимо.
Задачами автоматического управления двигателями летательных аппаратов являются [31, 32]:
•расчет оптимальных характеристик силовой установки по тяге
иэкономичности на заданном режиме работы;
•возможность изменения режимов работы двигателя при выполнении требований к длительности переходных процессов и поддержание заданного режима;
128
• сохранение устойчивости рабочих процессов и прочности конструкций двигателя путем предупреждения механических и тепловых нагрузок на ее элементы при установившихся и переходных режимах работы.
Эти требования должны выполняться при всех условиях полета. На основании вышеизложенных задач формируются программы управления, которые в значительной мере определяют характеристики двигателя, структуру СУ ДЛА, а следовательно, структуру подсистем
СУ и характер их взаимодействия.
Программы управления ДЛА по их назначению разделяют в зависимости от используемого режима: программы управления на максимальных режимах, режиме управления запуском двигателя, на дроссельных режимах, на режиме малого газа, на режимах приемистости и сброса газа, на форсированных режимах.
Синтез данных программ управления, как правило, осуществляется на этапе проектирования двигателя в результате решения задач с использованием среднестатистических или расчетных характеристик узлов двигателя на основе требований, предъявляемых к двигателю со стороны летательных аппаратов. При проектировании СУ ДЛА решаются вопросы технической реализации данных программ с максимальной точностью, быстродействием и т.д.
При проектировании СУ ДЛА применяется как гидромеханическая, так и электронная элементная база в соответствии с требованиями и условиями функционирования СУ ДЛА. Наличие электронной
игидромеханической базы обусловлено следующими требованиями:
•минимальное число подвижных частей в устройстве (уменьшает вероятность выхода из строя и упрощает конструкцию устройства). Это условие выполняется электронными элементами;
•работоспособность при высоких температурах окружающей и рабочей сред не является проблемой ни для гидромеханических, ни для пневматических элементов;
•работоспособность при отрицательных температурах определяется состоянием рабочего тела и поэтому ограничена только для пневматических элементов;
•высокое быстродействие полностью удовлетворяется электронными элементами;
129
•работоспособность в условиях радиации гидравлических и пневматических элементов практически не снижается, но ограничивается для электронных элементов;
•нечувствительность к ударным нагрузкам характерна для электронных и пневматических элементов;
•возможность миниатюризации реальна для электронных элементов в интегральных схемах с большой и сверхбольшой степенью интеграции;
•технологичность конструкции, допускающая применение современных способов массового производства и позволяющая существенно сократить трудоемкость элементов, является достоинством электронных элементов;
•чувствительность к загрязнению рабочей среды гидромеханических и пневматических элементов требует высокой чистоты рабочего тела и может быть обеспечена только с помощью специальных средств фильтрации, к электронным элементам такие требования не предъявляются.
Современные системы автоматического управления двигателями летательных аппаратов включают в себя три типа подсистем различной структуры и сложности [31, 32]:
•имеющие только гидромеханическое оборудование (например, подсистемы управления приемистостью и сбросом газа);
•имеющие только электронное оборудование (подсистемы управления противообледенительной системой, включения турбостартера, оценки наработки двигателя и т.д.);
•имеющие электронное оборудование в качестве основного регулятора, работающие совместно с гидромеханическим исполнительным механизмом, и гидромеханический регулятор, используемый в качестве резервного при отказе электронной части (подсистема управления расходом топлива, положением лопаток входного направляющего аппарата).
Система топливопитания, занимающая центральное место в СУ ДЛА, структурно представляет третий тип систем, т.е. сочетание гидромеханических и электронных подсистем, при этом гидромеханические агрегаты (ГМА) выполняют двойную роль:
•исполнительных механизмов основной СУ ДЛА при работе электронной подсистемы (основной автоматики);
130