

Автоматизированная обработка электроэнцефалограмм на ЭВМ (96
..pdfМосковский государственный технический университет имени Н.Э. Баумана
П.В. Лужнов, И.К. Сергеев
АВТОМАТИЗИРОВАННАЯ ОБРАБОТКА ЭЛЕКТРОЭНЦЕФАЛОГРАММ НА ЭВМ
Методические указания к выполнению лабораторной работы по курсу «Методы обработки биосигналов»
М о с к в а Издательство МГТУ им. Н.Э. Баумана
2 0 0 6
УДК 681.30.2 ББК 53.4
Л82
Рецензент А.В. Самородов
Лужнов П.В., Сергеев И.К.
Л82 Автоматизированная обработка электроэнцефалограмм на ЭВМ: Методические указания к выполнению лабораторной работы по курсу «Методы обработки биосигналов». – М.: Изд-воМГТУим. Н.Э. Баумана, 2006. – 24 с.: ил.
ISBN 5-7038-2823-6
Даны практические рекомендации по изучению электроэнцефалографических сигналов. Рассмотрены вопросы генеза электроэнцефалограмм. Приведены современные методы оценки электроэнцефалографических сигналов с использованием спектральных методов и теории цифровой обработки сигналов.
Длястудентов4-гокурсафакультета«Биомедицинскаятехника». Ил. 8. Библиогр. 4 назв.
УДК 681.30.2 ББК 53.4
Петр Вячеславович Лужнов Игорь Константинович Сергеев
Автоматизированная обработка электроэнцефалограмм на ЭВМ
Редактор А.В. Сахарова Корректор М.А. Василевская
Компьютерная верстка А.Ю. Ураловой
Подписано в печать 28.03.2006. Формат 60 84/16 Бумага офсетная. Печ. л. 1,5. Усл. печ. л. 1,4. Уч.-изд. л. 1,3 Тираж 100 экз. Изд. № 20. Заказ
Издательство МГТУ им. Н.Э. Баумана 105005, Москва, 2-я Бауманская ул., 5
ISBN 5-7038-2823-6 |
МГТУ им. Н.Э. Баумана, 2006 |
ВВЕДЕНИЕ
Аппараты и системы электрофизического воздействия на биоткани используют ответные реакции систем организма для задач терапии и диагностики. Количественно и качественно оценить такие реакции невозможно без адекватного метрологического обеспечения самого воздействия, т. е. без определения плотности токов, потоков мощности электрического поля в том или ином органе или ткани организма. Сложность физически корректного их описания обусловлена, во-первых, существенным различием удельных электрических сопротивлений биотканей и, во-вторых, неправильностью геометрической формы границ органов и тканей.
Эти проблемы затрудняют использование аналитических методов расчета токов в неоднородных биотканях, поэтому при расчете, как правило, приходится применять весьма трудоемкие и громоздкие численные методы. Однако независимо от выбранного в конечном итоге метода на начальном этапе решения реальных задач необходимо проводить их качественный анализ, который обычно основан на использовании известных аналитических решений подобных задач, а также на оценке их точности. Эту точность сопоставляют с точностью используемых методов измерения медикобиологических параметров ответных реакций живых систем на воздействие. Анализ погрешности большинства традиционных методов измерения параметров сердечно-сосудистой, дыхательной, костномышечной и других систем организма показывает, что она, как правило, не превышает 15…25 %. Повышение точности измерений затруднительно, так как интерпретация данных в параметрах состояния живых систем часто не позволяет осуществлять дифференцированную диагностику патологических процессов.
В данной работе рассмотрены задачи нахождения распределения токов в конечности человека при электростимуляции и при бесконтактном электромагнитном воздействии.
Цели работы – изучение методов формирования базовых моделей для расчета токов в неоднородных средах и исследование распределениялокальныхтоковвконечностиприбиоадекватныхвоздействиях.
3

ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Электростимуляция
Для расчета параметров электростимуляции рассматриваем конечность (рис. 1), на поверхности которой установлены два длинных прямоугольных проводящих электрода, через которые протекает суммарный ток I. Хороший электрический контакт электродов с поверхностью кожи достигается при использовании, например, токопроводящих паст.
Рис. 1. Геометрические и биофизические параметры модели расчета плотностей токов при электростимуляции:
γ1 =1/ ρ1 – удельная проводимость костного мозга; |
γ2 =1/ ρ2 |
– костной ткани; |
γ3 =1/ ρ3 – мягких тканей; γ4 =1/ ρ4 – кровеносных |
сосудов; |
γ5 =1/ ρ5 – крови; |
ρi – удельное электрическое сопротивление
Допускаем, что расположение кости в геометрическом центре конечности не является принципиальным. Обоснованность этого допущения в дальнейшем будет проанализирована.
Задачу распределения токов в такой системе можно разбить на следующие этапы [1]:
– нахождение распределения токов в однородно проводящем цилиндре с радиусом R без неоднородных включений, состоящем только из мягких тканей;
4
–учет влияния кости;
–учет влияния сосудов.
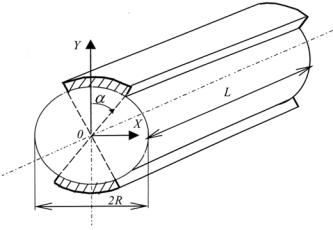
Выражение для комплексной плотности тока в однородно проводящей цилиндрической системе имеет вид (рис. 2) [2]
|
|
|
|
z 2 − |
1 |
|
|
|
|
2 − |
1 |
|
||
j(z) = C |
|
e−2iα + |
|
2 |
e2iα + |
|
z |
2 |
(1) |
|||||
|
|
|
|
|
|
|
|
|
|
, |
||||
|
|
|||||||||||||
1 |
|
|
|
|
|
|
||||||||
|
|
|
|
R |
|
|
|
|
R |
|
|
|
||
где j(z) = jx (x, y) −ijy (x, y); |
|
z = x +iy; C1 |
– |
действительная кон- |
||||||||||
станта. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2. Модель однородно проводящей цилиндрической системы
Проинтегрировав плотность тока в средней плоскости конечности, получим для оценки величины C1 общий ток
R |
|
I = 2L∫ j(x)dx. |
(2) |
0 |
|
Из выражений (1) и (2) найдем следующие соотношения:
|
|
|
R |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
I |
|
x |
2 2 |
|
x |
2 2 |
|
||||
C1 |
= |
|
∫ e−2iα + |
|
|
e2iα + |
|
|
dx, |
(3) |
|||
2L |
|
|
|||||||||||
|
|
0 |
|
|
R |
|
|
R |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |

|
|
|
|
|
|
|
|
|
|
C |
= |
|
I |
|
, |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
2LC |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|||
C = ∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
0 |
|
|
−2iα |
|
|
|
x |
2 |
|
|
2iα |
|
x |
2 |
||||||||||||
|
|
|
e |
|
|
|
+ |
|
|
e |
|
|
+ |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
R |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4) |
||
R |
|
|
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
||
= ∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|||
|
x |
4 |
|
|
|
x |
2 |
(e |
|
|
|
|
|
|
)+1 |
|
|||||||||||
0 |
|
|
|
|
2iα |
+e |
−2iα |
|
|
||||||||||||||||||
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
R |
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Заменяя переменную t |
на |
|
x2 |
|
в (4) и преобразуя интеграл в стан- |
||||||||||||||||||||||
|
|
R |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
дартную форму записи неполного эллиптического интеграла 1-го рода F (ϕ, k ), получаем
1 |
R |
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
C = ∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|||
|
( |
|
|
|
|
|
|
|
) |
|
||||||||
0 2 |
t |
t2 + |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
2t cos 2α+1 |
|
|
|
||||||||||
2 |
ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
tg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
2 |
|
|
|
|
|
|
dt |
|
|
|
|
|
||||
F (ϕ, k)= ∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
||||
|
|
|
|
t t |
2 |
+ 2(m |
2 |
− k |
2 |
|
||||||||
|
|
0 |
|
|
|
|
|
|
|
)t +1 |
||||||||
где m = 1 −k2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Имеем очевидные соотношения |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
tg |
2 |
ϕ |
|
=1, |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
1 −2k2 = cos 2α,
6
(5)
(6)
(7)

откуда k =sin α, |
ϕ= π. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В данном случае неполный эллиптический интеграл можно |
||||||||||||||||||||||
выразить через полный эллиптический интеграл K [2, 3]: |
|
|||||||||||||||||||||
|
|
|
ϕ |
|
|
dϕ |
|
|
|
2ϕ |
|
|
|
|
|
|||||||
|
|
|
F (ϕ, k)= ∫ |
|
= |
K, |
|
(8) |
||||||||||||||
|
|
|
|
1 −k |
2 |
sin ϕ |
|
π |
|
|||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
dϕ |
|
|
|
π 1 + |
k2 |
|
|
1 |
|
|
32 |
k 4 |
+... , |
|
|||||
K = |
|
|
= |
+ |
|
|
(9) |
|||||||||||||||
∫ |
|
|
|
|
|
2 |
|
|
||||||||||||||
|
1 −k 2 sin ϕ |
|
|
|
|
4 |
|
2 |
4 |
2 |
|
|
|
|||||||||
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где k = sin α <1. Следовательно, в разложении (9) допустимо ог-
раничиваться конечным числом членов.
Окончательное выражение для константы С1 принимает вид
C =πRL(1 + |
1 |
sin2 |
α+ |
1 |
|
32 |
|
sin4 α), |
|
|
(10) |
|||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
1 |
|
|
22 |
|
|
22 |
42 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где 2α – угол развертки электродов (см. рис. 1); L – их длина. |
|
|||||||||||||||||||||||
Используя полярные координаты (ϕ,ρ) |
и решение (1), получим |
|||||||||||||||||||||||
j (z)= j |
|
(z)−ij |
|
(z)= |
|
C |
|
|
|
|
|
j |
x |
|
|
jy |
|
|
||||||
x |
y |
|
1 |
|
|
|
|
|
|
−i |
|
|
|
|
, |
(11) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
4 A2 + B2 |
|
|
|
j |
|
|
|
j |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где
z =ρcos ϕ+iρsin ϕ,
|
j |
x |
|
|
= |
|
A2 + B2 + A |
, |
|
|
jy |
= |
A2 + B2 |
− A |
, |
||||
|
j |
|
|
2 A2 + B2 |
|
|
j |
|
2 A2 + B2 |
||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
ρ |
4 |
|
|
ρ |
2 |
|
|
|
|||||
|
|
A = |
|
|
cos 4ϕ+ 2 |
|
|
|
|
|
cos 2ϕ cos 2α +1, |
||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
R |
|
|
|
R |
|
|
|
|
|||||
7

|
ρ 4 |
|
|
ρ |
2 |
||
B = |
|
|
sin 4ϕ + 2 |
|
|
|
sin 2ϕ cos 2α. |
|
|
||||||
|
R |
|
|
R |
|
||
Найденные соотношения позволяют определить значения плотности тока в любой точке цилиндра (см. рис. 2) и, следовательно, являются решением первого этапа задачи.
Вычислительный эксперимент, проведенный c использованием (11), показывает, что при учете реальных размеров конечности и кости плотность тока в пределах области расположения кости можно (с точностью до 10…15 %) считать постоянной по величине и направлению. Таким образом, в качестве модели для второго этапа решения задачи возможно рассматривать достаточно протяженную однородную среду проводимости γ3 с плотностью тока
j3 , в которую внесено цилиндрическое включение с проводимостями γ2 , γ1 (рис. 3).
Рис. 3. Модель для расчета распределения плотности тока в цилиндрическом включении
Расчеты надо проводить в центральной плоскости с тем, чтобы не учитывать эффектов конечной длины включения. В этом случае задача нахождения распределения электрического потенциала является плоской, а ее решение – решением уравнения Лапласа для распределения электрического потенциала, которое в полярных координатах имеет вид
8

1 ∂ |
∂ϕ |
|
1 ∂2ϕ |
|
||||
|
|
|
r |
|
+ |
|
|
= 0. |
|
|
r2 |
∂θ2 |
|||||
r ∂r |
∂r |
|
|
|||||
Общее решение уравнения Лапласа в полярных координатах имеет вид
ϕ= с1 |
+∞ |
(Anrn + Bnr−n )(cos nθ+sin nθ), |
|
+с2An(r )+ ∑ |
(12) |
||
|
−∞ |
|
|
где константы определяются из граничных условий и особенностей рассматриваемой задачи. Для симметричной задачи в нашем
случае ϕ(−θ)=ϕ(θ) и, следовательно, в выражении (12) члены с sin (nθ) отсутствуют.
Плотности токов в биосредах определяются как j1 = E1 = γ1E1 = ρ1
= −γ1grad(ϕ1) [1, 4], а вследствие конечности потенциала при r = 0 из выражения (12) имеем
ϕ =с |
∞ |
A rn cos nθ. |
+ ∑ |
||
1 1 |
n=1 |
n |
|
|
Учитывая, что решение должно иметь период 2π и принимая для внутренней области потенциал в центре равным нулю, получаем выражение для потенциала
ϕ1 = A1r cos θ. |
(13) |
Рассуждая аналогично, получаем следующие выражения для двух других областей решения:
j2 = E2 = γ2 E2 = −γ2grad(ϕ2 ), ρ2
ϕ |
|
= |
|
A r + |
A4 |
cos θ, |
(14) |
2 |
|
|
|||||
|
|
3 |
r |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |

j |
= |
E3 |
= γ |
E |
= −γ |
3 |
grad(ϕ |
3 |
), |
|||||
ρ |
||||||||||||||
3 |
|
|
|
|
3 3 |
|
|
|
|
|
||||
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ = |
|
A r + |
|
A6 |
cos θ. |
|
(15) |
||||||
|
|
|
|
|
||||||||||
|
|
3 |
|
|
5 |
|
r |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
При большом удалении от цилиндрического включения поле практически однородно, следовательно, должно выполняться ус-
ловие ϕ |
|
∞ |
= E r cos θ= j |
r cos θ |
, |
откуда находим |
|
|
|
|
|||||||
|
|
|
||||||
3 |
|
3 |
3 |
γ |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
A5 = j3 / γ3. |
(16) |
||
На границах разделов r = a и r = b выполняются условия непрерывности потенциала и нормальных составляющих плотности тока. Нормальные компоненты плотности тока, как известно, определяются выражением
jni = −γi ∂ϕ∂ri .
Следовательно, имеем уравнения для нахождения оставшихся коэффициентов:
ϕ3 r=b =ϕ2 r=b A3b + Ab4 = E3b + Ab6 ,
|
|
|
|
|
|
ϕ |
2 |
r |
=ϕ |
r=a |
A a = |
A a + |
A4 |
|
, |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
=a |
|
1 |
|
|
1 |
|
|
|
3 |
|
|
a |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
γ |
|
∂ϕ3 |
|
|
= γ |
|
∂ϕ2 |
|
|
γ |
|
E |
|
− |
|
A6 |
|
= γ |
|
A |
− |
A4 |
|
, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
3 |
|
r=b |
2 |
r=b |
3 |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
2 |
3 |
|
|
|
|||||||||
|
|
∂r |
|
|
∂ϕ2 |
|
|
|
|
∂r |
|
∂ϕ1 |
|
|
|
|
|
|
|
|
|
b2 |
A4 |
|
|
|
|
|
b2 |
|
||||||
|
|
γ |
2 |
|
|
|
r=a |
= γ |
1 |
|
r |
=a |
γ |
|
|
A − |
|
= γ |
|
A . |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
∂r |
|
|
|
|
∂r |
|
|
|
|
|
2 |
3 |
|
|
|
|
|
1 1 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
|
|
|
|
|
|
||||||
10