

Исследование характеристик двигателя постоянного тока в системе «управляемый преобразователь – двигатель» (УП-Д) (60
..pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра электрооборудования
А.Н. Шпиганович, С.В. Довженко
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА В СИСТЕМЕ
«УПРАВЛЯЕМЫЙ ПРЕОБРАЗОВАТЕЛЬ – ДВИГАТЕЛЬ» (УП-Д)
МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторной работе по дисциплине «Электротехника»
Утверждаю к печати |
Проректор по учебной работе |
Объем 0,75 п. л. |
Ю.П. Качановский |
Тираж 50 экз. |
«___» ____________2012 г. |
Липецк Липецкий государственный технический университет
2012
1
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ
БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра электрооборудования
А.Н. Шпиганович, С.В. Довженко
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА В СИСТЕМЕ
«УПРАВЛЯЕМЫЙ ПРЕОБРАЗОВАТЕЛЬ – ДВИГАТЕЛЬ» (УП-Д)
МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторной работе по дисциплине «Электротехника»
Утверждаю к печати |
Заведующий кафедрой |
|
электрооборудования |
Объем 0,75 п. л. |
А.Н. Шпиганови ч |
Тираж 50 экз. |
«___» ____________2012 г. |
Липецк Липецкий государственный технический университет
2012
2

708
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ
БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра электрооборудования
А.Н. Шпиганович, С.В. Довженко
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА В СИСТЕМЕ
«УПРАВЛЯЕМЫЙ ПРЕОБРАЗОВАТЕЛЬ – ДВИГАТЕЛЬ» (УП-Д)
МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторной работе по дисциплине «Электротехника»
Липецк Липецкий государственный технический университет
2012
3
УДК 621.31 (07) Ш 835
Рецензент – Ю.П. Никифоров, канд. техн. наук, доцент
Шпиганович, А.Н.
Ш 835 Исследование характеристик двигателя постоянного тока в системе
«управляемый преобразователь – двигатель» (УП-Д) [Текст]: методические указания к лабораторной работе по дисциплине «Электротехника» /А.Н. Шпиганович, С.В. Довженко - Липецк: Изд-во ЛГТУ, 2012. – 12 с.
Предназначены для студентов 2 и 3 курса неэлектротехнических направле-
ний очной, очно-заочной и заочной форм обучения, изучающих дисциплину «Электротехника».
Табл. 1. Ил. 6. Библиогр.: 3 назв.
©Шпиганович А.Н., Довженко С.В., 2012
©ФГБОУ ВПО «Липецкий государственный
технический университет», 2012
4
Лабораторная работа № 1
Исследование характеристик двигателя постоянного тока в системе «управляемый преобразователь – двигатель» (УП-Д)
Цель работы – экспериментальное изучение электромеханических и механических характеристик двигателя постоянного тока в разомкнутой и замкнутой системах УП-Д с отрицательной обратной связью по скорости.
1.Оборудование и приборы
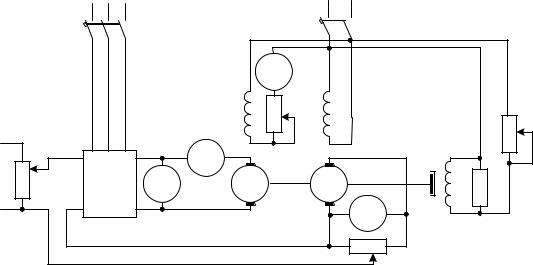
Влабораторной работе исследуются характеристики двигателя постоянного тока независимого возбуждения. Якорь двигателя получает питание от управляемого преобразователя UZ (УП) (рис. 1). В качестве УП использован трехфазный мостовой тиристорный преобразователь, конвертирующий нерегулируемое напряжение сети переменного тока в регулируемое напряжение постоянного тока, подаваемое на якорь двигателя М.
Скорость вращения якоря двигателя М изменяется вольтметром pn, подключенным к тахогенератору BR. Механической нагрузкой двигателя служит электромагнитный тормоз YB. Величину момента на валу двигателя можно изменять, регулируя движком реостата RT ток в обмотке LYB тормоза. Обмотки возбуждения двигателя LM и тахогенератора LBR получают питание от сети постоянного тока.
Напряжение управления Uy на входе системы изменяется потенциометром
Ry, величина напряжения обратной связи по скорости U = регулируется потенциометром R . При перемещении движка R в точку 1 (рис. 1) степень обратной связи по скорости равна нулю и схема работает как разомкнутая. При установке движка R в точку 2 обратная связь по скорости максимальна.
5
~Uc |
+ |
Us |
- |
|
|
||
|
QF1 |
|
QF2 |
|
PA2 |
LM |
LBR |
RT
+ |
|
|
|
|
|
PA1 |
|
|
|
|
|
|
|
|
|
|
|
YB |
|
Ry |
- |
Uy |
UΣ |
УП |
PV |
M |
BR |
|
|
|
|
(UZ) |
|
|
|||||
|
+ - |
+ |
|
|
|
|
|
||
- |
|
|
|
|
Pn |
|
|||
|
|
U |
|
|
|
|
LYB |
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
+ |
|
- |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
R |
Рис. 1. Схема для исследования характеристик системы «управляемый преобразователь – двигатель»
2. Порядок выполнения работы
2.1. Записать паспортные данные преобразователя, двигателя постоянного тока и электроизмерительных приборов.
2.2. Ознакомиться со схемой установки (рис. 1) и выполнить необходимые соединения.
2.3. Проверить положение ручек потенциометров Ry, R . Они должны находиться в крайнем положении против часовой стрелки (Uy=0, =0).
2.4. Ввести полностью реостат RT электромагнитного тормоза, что соответствует крайнему нижнему положению движков реостатов на стенде.
2.5. Включить автоматический выключатель QF2 цепей постоянного тока и тумблер «СИФУ» питания цепей управления преобразователя (на рис. 1 не показан).
2.6. Включить автоматический выключатель QF1 питания преобразователя. 2.7. Плавным поворотом ручки потенциометра Ry по часовой стрелке уве-
личить напряжение на якоре двигателя до 70-90 В, произведя тем самым пуск двигателя.
6
2.8. Увеличивая нагрузку на валу двигателя с помощью движков реостата RT (перемещать вверх) электромагнитного тормоза, снять экспериментально электромеханическую и механическую характеристики привода в разомкнутой системе для двух значений напряжения на якоре: Uя1=70-90 В и Uя2=110-130 В. Результаты измерений занести в табл. Загрузить двигатель, установив движки реостата RT в крайнее нижнее положение.
Таблица
=0
=0
0
0
Результаты измерений
n |
об./мин |
|
|
IЯ |
А |
МНм
n |
об./мин |
|
|
IЯ |
А |
МНм
n |
об./мин |
|
|
IЯ |
А |
МНм
n |
об./мин |
|
|
IЯ |
А |
МНм
2.9. Потенциометром Ry повысить напряжение на якоре двигателя до 120-
140 В. Повторить действия по пункту 2.8.
2.10. Ввести отрицательную обратную связь по скорости, плавно поворачивая ручку потенциометра R по часовой стрелке до тех пор, пока напряжение на двигателе не снизится до 70-90 В, и снять указанные характеристики в замкнутой системе привода при двух значениях напряжения на якоре аналогично пункту 2.8.
7
2.11. Плавным поворотом ручки потенциометра Ry по часовой стрелке вновь увеличить напряжение на якоре двигателя до 120-140 В. Повторить действия по пункту 2.8.
2.12. Повернув потенциометры Ry, затем R в крайнее положение против часовой стрелки, остановить двигатель. Выключить автоматические выключатели QF1, QF2, затем тумблер «СИФУ».
3. Обработка результатов измерений и содержание отчета
3.1. Цель работы.
3.2. Краткий перечень оборудования и приборов.
3.3. Экспериментальные механические характеристики в замкнутой и разомкнутой системах привода, построенные на одном рисунке.
3.4. Анализ влияния напряжения Uy и коэффициента на вид характеристик (жесткость и другие параметры).
3.5. Расчет для всех опытов жесткости механических характеристик по
формуле M .
4.Основные теоретические сведения
4.1.Электромеханические свойства двигателей постоянного тока независимого и параллельного возбуждения. Схема включения электродвигателя представлена на рис. 2. Для цепи якоря по второму закону Кирхгофа можно с о- ставить уравнение
U - Iя (Rя + Rд ) = Е, |
(1) |
где U – напряжение цепи якоря; Rя – сопротивление обмотки якоря; Rд – дополнительное сопротивление; Е – эдс обмотки якоря.
8

|
+ |
U |
|
|
|
- |
|
IB |
|
|
|
|
|
|
|
LM |
|
E |
Rд |
|
|
||
|
|
|
RB |
М |
|
|
Rя |
Iя |
||
|
Рис. 2. Схема включения электродвигателя постоянного тока
E = cФ, |
(2) |
где с – конструктивная постоянная; Ф - магнитный поток обмотки возбуждения; - скорость вращения якоря.
Вращающий момент электродвигателя определяется по формуле
М = сФIя . |
(3) |
Используя уравнения (1) – (3), получим уравнение механической характеристики
= |
U |
- M |
R Я |
R Д |
= 0 |
- , |
(4) |
|
cФ |
с2 |
Ф2 |
||||||
|
|
|
|
|
где 0 – скорость идеального хода; - перепад скорости при нагрузке. Механическая характеристика, соответствующая уравнению (4), показана
на рис. 3.
0 








ном 








0 |
Мном |
М |
Рис. 3. Механическая характеристика электродвигателя постоянного тока
9
Уравнение (4) показывает, что регулирование скорости вращения якоря можно осуществлять тремя способами.
- Изменением напряжения на якоре:
0 U Uном ; Ф = Фном ; Rд = 0.
При этом изменяется только скорость идеального холостого хода 0. - Изменением магнитного потока:
0,7 Фном Ф Фном , U = Uном , Rд =0.
Характеристики располагаются выше естественной и имеют больший наклон (меньшую жесткость).
- Изменением величины дополнительного сопротивления в цепи якоря RД при U = Uном и Ф = Фном (реостатное регулирование). Такой способ в электроприводах промышленных установок не используется из-за неэкономичности.
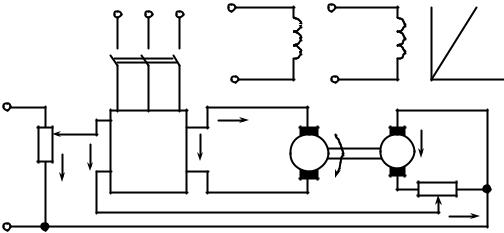
4.2. Система «Управляемый преобразователь – двигатель» (УП-Д). В электроприводе, требующем плавного изменения скорости, двигатель постоянного тока питается от управляемого тиристорного преобразователя. Система электропривода может быть замкнутой и разомкнутой. На рис. 4 представлена схема системы УП-Д.
3 50 Гц |
+ |
+ |
UBR |
|
|||
|
|
LM |
LBR |
QF |
|
|
|
|
- |
- |
|
Ry |
|
UZ |
|
IЯ |
|
UBR |
UΣ |
( УП) |
Ud |
М |
BR |
||
|
||||||
|
|
R |
||||
|
|
|
|
|
|
|
|
Uy |
|
|
|
|
U |
|
|
|
|
|
|
Рис. 4. Принципиальная схема системы УП-Д
10