

Критсына Лабораторныы практикум по курсу Статистические методы 2015
.pdf= ˆ − =
V lim i var {ci c} i→∞
ˆ |
ˆ |
т |
} , |
(3.10) |
= lim iM{(ci −c)(ci −c) |
|
|||
i→∞ |
|
|
|
|
чем меньше АМКО, тем быстрее скорость сходимости алгоритма.
ˆi функционально зависит от вида функции потерь и Так как c F(ε)
от вида матрицы Γi , то и АМКОявляетсяфункционалом F(ε) и Γi . В дальнейшем несколько упростим задачу и будем задавать Γi в
виде
Γ = B , |
(3.11) |
i i
причем матрица В, как указывалось ранее, – некоторая положительно определенная матрица.
Очевидно, АМКО зависит от выбора матрицы B и от вида функции потерь F (ε) .
В работе [1] показано, что при заданной функции потерь минимальное значение АМКО достигается при значениях
B* = |
|
1 |
|
A−1 (c, ση2 ), |
(3.12а) |
||
∞ |
|
|
|||||
|
|
∫F′′(η) f (η)dη |
|
||||
|
|
−∞ |
|
|
|
|
|
или |
1 |
|
|
A−1 (c, ση2 ). |
|
||
B* = |
|
|
|
(3.12б) |
|||
∞ |
|
|
|
||||
|
|
|
′ |
′ |
|
||
|
− ∫F (η) f (η)dη |
|
|||||
−∞
Такие алгоритмы в дальнейшем будем называть оптимальными. В этом случае АМКО будет иметь вид [1]
|
|
∞ |
|
|
|
|
|
|
|
|
|
∫F ′2 (η) f (η)dη |
A −1 |
( |
|
, ση2 ) |
|||
V(B*) = |
|
−∞ |
|
|
c |
||||
|
∞ |
|
|
2 |
|||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
|
′′ |
|
|
|
|
|
|
|
F (η) f (η)dη |
|
|
|
|
|
||
|
−∞ |
|
|
|
|
|
|
||
|
|
|
|
51 |
|
|
|
|
|

или
|
|
∞ |
|
|
|
|
|
|
|
∫F ′2 (η) f (η)dη |
|
A−1 |
(c, ση2 ). |
||
V(B*) = |
|
−∞ |
|
|
|||
|
|
|
2 |
||||
|
∞ |
|
|
|
|
||
|
|
∫ |
|
|
|
|
|
|
|
|
F ′(η) f ′(η)dη |
|
|
|
|
|
−∞ |
|
|
|
|
|
|
Как видно, полученная АМКО является функционалом от функции потерь F(ε) и плотности распределения f (η) . В дальнейшем
АМКО, оптимальную относительно матрицы В, будем обозначать
V(F, f ) , т.е.
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
∫F ′2 (η) f (η)dη |
|
|
A −1 |
( |
|
, ση2 )dη |
||||
V(F, f ) = |
−∞ |
|
|
|
|
|
c |
||||||
|
|
|
2 |
||||||||||
|
|
|
∞ |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
∫ |
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
F (η) f |
(η)dη |
|
|
|
|
|
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
||
или |
∞ |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫F′2 (η) f (η)dη |
|
|
A−1 |
(c,ση2 )dη. |
||||||
V(F, f ) = |
−∞ |
|
|
|
|
|
|||||||
|
|
|
|
2 |
|||||||||
|
|
∞ |
|
|
|
|
|
|
|
|
|||
|
|
∫F ′′(η) f (η)dη |
|
|
|
|
|
|
|||||
|
−∞ |
|
|
|
|
|
|
|
|
|
|||
(3.13а)
(3.13б)
Подставляя матрицу В*, определяемую по формуле (3.12а) или (3.12б), в рекуррентный алгоритм (3.8) и раскрывая частную произ-
водную, получим: |
|
|
|
|
|
|
|
|
|
|
|
||||
ˆ ˆ |
1 |
1 |
|
|
−1 |
|
ˆ |
2 |
dF(ε) |
|
|
|
|||
|
|
|
|
|
|
||||||||||
ci =ci−1 |
+ |
i |
|
∞ |
|
A |
|
(ci−1 |
, ση) |
dε |
|
ˆ |
× |
||
|
|
|
|
− ∫F ′(η) f ′(η)dη |
|
|
|
|
|
|
|
ε=y(i)−ψ(i,ci−1) |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
−∞ |
~ |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
× |
∂ψ(i, c ) |
|
|
|
|
|
|
(3.14а) |
|||
|
|
|
|
~ |
|
|
~ |
|
|
|
|
||||
|
|
|
|
|
∂c |
|
|
ˆ |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
c |
=ci−1 |
|
|
|
|
||
или
52

ˆ ˆ |
1 |
1 |
|
|
−1 |
|
ˆ |
2 dF(ε) |
|
|
||
|
|
|
|
|
||||||||
ci = ci−1 |
+ i ∞ |
|
A |
|
(ci−1 |
,ση ) |
dε |
ˆ |
× |
|||
|
|
∫F′′(η) f (η)dη |
|
|
|
|
|
|
ε=y(i)−ψ(i,ci−1 ) |
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
−∞ |
~ |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
× |
∂ψ(i, c ) |
|
|
|
. |
|
|
(3.14б) |
||
|
|
~ |
|
|
~ |
|
|
|
||||
|
|
|
∂c |
|
|
ˆ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
c |
=ci−1 |
|
|
|
||
Полученные рекуррентные формулы являются наиболее общими и могут быть использованы для идентификации параметров нелинейного объекта при произвольной функции потерь F(ε) .
Существенным недостатком данного алгоритма является необходимость рассчитывать, а затем обращать матрицу A(c, σ2η). В рабо-
тах [1], [7] приводится рекуррентная формула, позволяющая упростить вычисление этой матрицы. В результате рекуррентная формула (3.14б) распадаетсяна две рекуррентныепоследовательности
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
ˆ ˆ |
′ |
ˆ |
∂ψ(i, c ) |
|
|
, |
(3.14в) |
ci = ci−1 |
|
~ |
|
|
|||
+ Γ(i)F (ε(i, c(i −1))) |
|
~ |
|||||
|
|
|
∂c |
|
ˆ |
|
|
|
|
|
|
|
|||
|
|
|
|
c |
=ci−1 |
|
|
где Γ(i) вычисляется на каждом шаге рекуррентного процесса по
формуле
Γ(i) = Γ(i −1) −
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
т |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
Γ(i −1) |
∂ψ(i,c) |
|
|
∂ |
|
ψ(i,c) |
|
|
Γ(i −1) |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
∂c |
|
|
~ |
ˆ |
|
|
∂c |
|
|
~ |
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
c=ci−1 |
|
|
|
|
|
|
|
|
c=ci−1 |
|
|
|
|
|
|
|
|
|
|
(3.15а) |
||||
|
|
|
∞ |
|
|
|
|
−1 |
|
|
т |
|
~ |
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
∫ |
|
|
|
|
|
|
∂ |
ψ(i,c) |
|
|
|
|
|
|
|
|
∂ψ(i,c) |
|
|
|
|
|
|||||||||||||
|
|
− |
F |
′ |
′ |
|
|
+ |
|
|
~ |
|
|
|
|
|
|
|
|
Γ(i −1) |
|
~ |
|
|
|
|
|
|
|
|||||||||
|
|
(η) f (η)dη |
|
|
|
|
|
|
|
|
~ ˆ |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
∂c |
|
|
|
|
|
|
|
|
|
|
|
∂c |
|
|
|
|
~ |
ˆ |
|
|||||||
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c=ci |
−1 |
|
|
|
|
|
|
|
|
|
c=ci−1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Γ(i) = Γ(i −1) − |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
∂ |
т |
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Γ(i −1) |
∂ψ(i,c) |
|
|
|
ψ(i,c) |
|
|
Γ(i −1) |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
∂c |
|
|
~ |
ˆ |
|
|
|
∂c |
|
~ |
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
− |
|
|
|
|
|
|
|
|
|
|
|
|
c=ci−1 |
|
|
|
|
|
|
|
|
c=ci |
−1 |
|
|
|
|
|
|
|
|
|
. |
(3.15б) |
||||
|
∞ |
|
|
|
|
−1 |
|
|
т |
|
~ |
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
∫ |
|
|
|
|
|
|
∂ |
ψ(i,c) |
|
|
|
|
|
|
∂ψ(i,c) |
|
|
|
|
|
||||||||||||||||
|
|
|
|
′′ |
|
|
|
|
+ |
|
|
|
~ |
|
|
|
|
|
|
Γ(i −1) |
|
~ |
|
|
|
|
|
|
|
|
||||||||
|
|
|
F (η) f (η)dη |
|
|
|
|
|
|
|
~ ˆ |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
∂c |
|
|
|
|
|
|
|
|
|
∂c |
|
|
~ ˆ |
|
|
|
|||||||||||
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
53 |
|
|
c=ci−1 |
|
|
|
|
|
|
|
|
|
|
c=ci−1 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В качестве начального приближения принимают матрицу
Γ(0) =λI , |
(3.16) |
где – большое число. Начальное приближение ˆ может быть за-
λ c0
дано любым вектором соответствующей размерности.
3.3. Абсолютно-оптимальные рекуррентные алгоритмы
Как было указано ранее (см. формулу (3.13а)), АМКО, оптимальная по матрице В, имеет вид
|
|
∞ |
|
|
|
|
|
V * (F , f ) = |
|
∫F ′2 (η) f (η)dη |
|
A−1 |
(c, ση2 ). |
||
−∞ |
|
|
|||||
|
|
2 |
|||||
|
|
∞ |
|
|
|
|
|
|
|
∫ |
|
|
|
|
|
|
|
|
F ′(η) f ′(η)dη |
|
|
|
|
|
−∞ |
|
|
|
|
|
|
Будем считать, что плотность распределения ошибок измерений известна. Тогда [1] можно найти такую функцию потерь F * (ε) , которая обеспечивает минимум АМКО:
F * (ε) = − ln f (η) |
|
η=ε . |
(3.17) |
|
|||
|
|
Как видно, оптимальная функция потерь совпадает с функцией потерь, соответствующей методу максимума правдоподобия при аддитивной помехе.
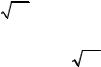
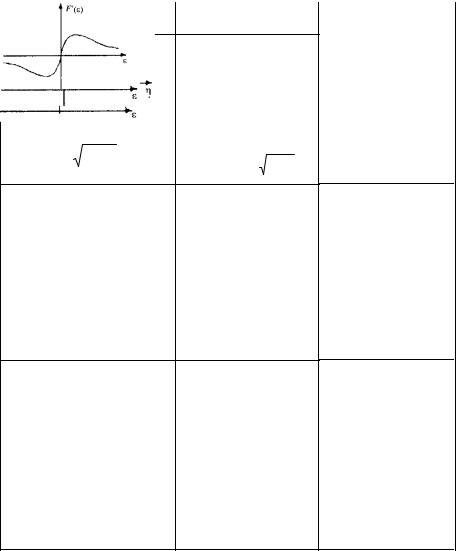
Приведем примеры оптимальных функций потерь и их производных для различных плотностей распределения шумов.
1. Нормальная (гауссова) плотность распределения помех:
f (η) = |
1 |
|
2 |
2 |
= N(0,ση) . |
|
−η |
||||
2π ση |
exp |
/ 2ση |
|||
|
|
|
|
|
Функция потерь, согласно (3.17), будет иметь вид
F * (ε) = ε2 / 2ση2 + ln 2πση , F *′ (ε) = ε / ση2 . |
(3.18) |
Поскольку положение экстремума не зависит от постоянных слагаемых, томожно записать следующий оптимизируемый критерий:
54

|
~ |
|
N |
2 |
|
|
J (c ) = ∑( y(i) − y(i)) |
, |
|||||
|
||||||
~ |
i=1 |
~ |
||||
~ |
||||||
или в векторной форме: J(c) =(y − y)т(y − y) .
Таким образом, при нормальном законе распределения использование оптимальной функции потерь эквивалентно применению метода наименьших квадратов.
2. Экспоненциальная плотность распределения помех (плотность распределения Лапласа)
|
|
|
|
f (η) = |
1 |
|
exp[− |
|
η |
|
/ α] = L(0, α) . |
|
|
|
|
|
|||||||||
2α |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
Для функции потерь получаем: |
|
|
|
|
|
|
||||||
F *(ε) = |
|
ε |
|
/ α+ln2α, |
F *′ (ε) = sign ε / α . |
(3.19) |
||||||
|
|
|||||||||||
В данном случае получили модульную функцию потерь. Использование метода наименьших квадратов будет давать худшие асимптотические свойства оценок.
3. Дробная плотность распределения помех (Коши),
f (η) = |
1 |
|
1 |
|
= C (0, α) . |
πα (1 + (η |
|
||||
|
/ α)2 ) |
||||
В этом случае имеем:
F *(ε) =ln(α2 +ε2 ) +ln π/ α, F *′(ε) =2ε/ (α2 +ε2 ) . (3.20)
Эти функции потерь и их производные приведены в табл. 3.1 [1].
Найдем АМКО при оптимально выбранной функции потерь
F * (ε) = − ln f (η) η=ε .
55
|
|
Таблица 3.1 |
Оптимальные функции потерь и их производные |
||
|
|
Производная функции |
Плотность |
Функция потерь F(ε) |
|
распределения f(η) |
|
потерь F′(ε) |
N (0, ση2 ) = |
1 |
e−η2 / 2ση2 |
|
|
|
|
|
|
|||
2πσ2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
ε/ση2 |
|
|
η |
|
ε2 / 2ση2 + ln 2πση2 |
|
|
1 |
− |
|
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
s |
|
|
|
|
|
|
||
L(0,s) = |
|
e |
|
|
ε |
|
/ s + ln 2s |
|
|
||
2s |
|
|
|
1 / s sign |
ε |
||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
c(0, s) = |
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
2ε/(s2 + ε2 ) |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
π |
|||||||
πs |
|
|
η |
2 |
|
ln(s |
2 |
+ ε |
2 |
) + ln |
|||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
s |
|||||||
|
|
|
1 |
+ |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
56
Подставив выражение (3.1 7) для оптимальной функции потерь в формулу для АМКО, получим:
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫ |
|
′2 |
(η)dη |
|
|
|
|
|||||
V(F*, f ) = |
|
f (η)F * |
|
A−1 (c, ση2 )= |
||||||||||||||
−∞ |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
2 |
||||||||||
|
|
|
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
∫ |
′ |
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f (η)F * (η)dη |
|
|
|
|
|||||||
|
|
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫ |
|
|
|
|
′ |
2 |
dη |
|
|
|
|
||||
|
|
|
f (η)[(−ln f (η)) ] |
|
|
|
(c, ση2 )= |
|||||||||||
= |
|
−∞ |
|
|
|
|
|
|
|
|
|
A−1 |
||||||
|
|
|
|
|
|
|
|
|
|
2 |
||||||||
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f ′(η)(−ln f (η))′dη |
|
|
|
|
|
|
|
||||||||
|
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫ |
f (η)[ f |
′ |
|
|
2 |
dη |
|
|
|
|
|||||
|
|
|
(η) / f (η)] |
|
|
|
(c, ση2 ). |
|||||||||||
= |
−∞ |
|
|
|
|
|
|
|
|
|
|
A−1 |
||||||
∞ |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
∫ f ′(η)[− f ′(η) / f (η)]dη |
|
|
|
|
||||||||||||
−∞
Приводя подобные члены, окончательно получаем:
V(F*, f ) = V( f ) = |
|
A−1(c, ση2 ) |
|
|
|
|
. |
(3.21) |
|
∞ |
|
|||
∫[ f ′(η)]2 / f (η)dη
−∞
Выражение, стоящее в знаменателе формулы (3.21), называется фишеровской информацией:
∞ |
|
I F ( f (η)) = ∫[ f ′(η)]2 / f (η)dη . |
(3.22) |
−∞ |
|
Очевидно, справедливо следующее неравенство: |
|
V(F, f ) ≥ V(F*, f ) , |
(3.23) |
где F(η) ≠ −ln f (η) , F *(η) =−ln f (η) . Или, раскрывая V(F, f ) и V(F*, f ) , получим:
57

∞
− ∫F′2 (η) f (η)dη |
(c,ση2 )≥ |
|
1 |
|
A−1(c,ση2 ). (3.24) |
|||||||
|
−∞ |
|
|
|
|
A−1 |
|
|
||||
|
∞ |
|
|
|
|
2 |
∞ |
|
|
|||
|
|
|
|
|
|
∫ |
2 |
|
|
|||
|
∫ |
|
′ |
′ |
|
|
|
|
f ′ (η)/ f (η)dη |
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
F (η) f (η)dη |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
−∞ |
|
|
|
−∞ |
|
|
|
|
|
|
|
|
|
|
||
Запишем абсолютно-оптимальный рекуррентный алгоритм для нелинейного объекта вида
=ψ ~ +η y(i) (i,c) (i) .
Для этого подставим в рекуррентные соотношения (3.15а), (3.14в) оптимальную функциюпотерь (3.17), а именно:
F * (ε) = − ln f (η) η=ε .
Тогда получим:
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ˆ |
ˆ |
|
|
|
|
′ |
|
|
|
|
|
∂ψ(i,c) |
|
|
|
|||||||||
с |
(i) =c |
(i −1) +Γ(i) |
|
|
|
f |
(η) |
|
|
|
|
|
|
~ |
|
|
|
, |
||||||
|
|
|
|
|
|
f (η) |
|
|
|
|
|
~ |
|
|
~ ~ |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
∂c |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
η=ε(i,c (i−1)) |
|
|
|
|
c =c (i−1) |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
~ |
|
|
|
|
|
т |
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Γ(i −1) |
∂ψ(i,c ) |
|
|
∂ |
ψ(i,c ) |
|
|
Γ(i −1) |
|
||||||||||||
|
|
|
|
~ |
|
|
|
|
|
|
~ |
|
|
~ ˆ |
|
|
||||||||
Γ(i) = Γ(i −1) − |
|
|
∂c |
|
|
~ |
ˆ |
|
|
|
∂c |
|
|
~ |
|
|
, |
|
||||||
|
|
т |
|
|
с=c (i−1) |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
c =c (i−1) |
|
|
|
|
|
|||||||
|
|
|
(IF ) |
−1 |
+ |
∂ ψ |
|
|
|
Γ(i −1) |
|
∂ψ(i,c ) |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
~ |
|
|
|
|
|
~ |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
∂c |
~ |
ˆ |
|
|
|
|
|
|
|
∂c |
|
~ |
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
=c (i−1) |
|
|
|
|
|
|
|
|
c |
=c (i |
−1) |
|
|||
(3.25)
(3.26)
ˆ |
(0) |
ˆ |
, |
Γ(0) = λI , |
ˆ |
– любой вектор соответствующей |
с |
=с0 |
λ >> 1 , c0 |
размерности; IF – фишеровская информация, рассчитываемая по формуле:
∞ |
′ |
2 |
|
|
IF = ∫ |
( f (η)) |
|
dη. |
(3.27) |
f (η) |
|
|||
−∞ |
|
|
|
В табл. 3.2 приведены значения фишеровской информации для наиболее распространенных распределений.
58
|
|
|
|
|
|
Таблица 3.2 |
|
|
|
|
|
|
Фишеровская информация |
||
|
|
|
|
|
|
|
|
|
|
№ |
|
|
Распределение |
Фишеровская информация |
|
|
|
1 |
|
|
Нормальное |
(ση2 )−1 |
|
|
|
2 |
|
|
Лапласа |
−1 |
|
|
|
|
|
|
|
(s 2 ) |
|
|
|
3 |
|
|
Коши |
−1 |
|
|
|
|
|
|
|
(2s2 ) |
|
В случае |
~линейного регрессионно-авторегрессионного (РАР) |
||||||
объекта |
∂ψ(i, c ) |
= z(i) . |
|
|
|||
~ |
|
|
|
||||
|
|
∂c |
|
|
|
|
|
Тогда, подставляя последнее выражение в рекуррентные соот-
ношения (3.25), (3.26), получим:
ˆ |
ˆ |
|
с(i) = c(i −1) |
+Γ(i) |
|
|
|
|
|
|
|
−1 |
f |
′ |
|
|
z(i) , |
(3.28) |
|
|
|
||||
|
(η) |
|
||||
f (η) |
|
|
|
|
~ |
|
|
|
|
|
|
||
|
|
|
|
η=ε(i,c (i−1)) |
|
|
|
|
|
|
|
||
Γ(i) = Γ(i −1) − |
Γ(i −1) z (i) z т (i)Γ(i −1) |
, |
(3.29) |
|
( I F )−1 + z т (i)Γ(i −1) z (i) |
||||
|
|
|
сˆ(0) =с0 , Γ(0) =λI , λ >> 1 .
В заключение настоящего раздела запишем абсолютнооптимальные рекуррентные алгоритмы для различных плотностей распределения, приведенных в табл. 3.1.
1. Нормальная плотность распределения помехи:
|
1 |
|
|
|
1 |
|
|
2 |
|
f (η) = |
|
|
exp |
− |
|
|
η |
|
. |
2 |
1/ 2 |
|
2 |
|
|||||
|
|
|
2σ |
|
|
|
|||
|
(2πση ) |
|
|
η |
|
|
|
||
Введем обозначения: H (i) = Γ(i) / σ2η .
59

Очевидно, при нормальном законе распределения функция потерь для абсолютно-оптимального алгоритма будет квадратичной, а именно:
F * (ε) = − ln f (η) η=ε F * (ε) = 2σ1 2η ε2 .
Тогда в новых обозначениях и учитывая вид функции невязки, абсолютно-оптимальный рекуррентный алгоритм для нормального закона распределения ошибок измерений принимает вид
ˆ |
ˆ |
+H(i)z(i)ε| |
|
ˆ |
, |
|
(3.30) |
|
c |
(i) =c(i −1) |
т |
|
|||||
|
|
|
ε=(y(i)−z |
(i)c(i−1)) |
|
|
|
|
|
|
|
ˆ |
; |
|
|
|
|
|
|
|
c(0) =c0 |
|
|
|
|
|
H (i) = H (i −1) − |
H (i −1)z (i)z т (i)H (i −1) |
, |
(3.31) |
|||||
1 + z т (i)H (i −1)z(i) |
|
|||||||
|
|
|
|
|
|
|||
H(i) =λI , λ >> 1 .
Как видим, данный алгоритм имеет линейный относительно невязки вид, а потому получил название «линейный» рекуррентный алгоритм.
Сравнивая (3.30), (3.31) с рекуррентными соотношениями метода наименьших квадратов, можно сделать вывод, что рекуррентная форма метода наименьших квадратов полностью совпадает с абсо- лютно-оптимальным алгоритмом для нормального распределения помехи.
Алгоритм (3.31), (3.32) называется линейным. Как видим, линейный оптимальный алгоритм не зависит от дисперсии помехи, хотя, как нетрудно заметить, АМКО для этого распределения будет завесить от дисперсии шума.
2. Плотность распределения помехи – Лапласа:
f (η) = 21s e− ηs .
Принимая во внимание вид плотности распределения Лапласа и соответствующую фишеровскую информацию (см. табл. 3.2), функция потерь и абсолютно-оптимальный рекуррентный алгоритм (3.28), (3.29) принимают вид
F * (ε) = −ln f (η) η=ε F * (ε) = ε ;
60