

Журомский Нелинейные системы автоматического управления 2012
.pdfБлок сигнализации (БС) положения выходного вала предна-
значен для преобразования положения выходного вала механизма в пропорциональный электрический сигнал и блокирования угла поворота выходного вала в крайних или промежуточных положениях.
В состав каждого БС входят два основных узла: блок микропереключателей и блок датчиков.
Микропереключатели предназначены для ограничения поворота выходного вала, расположены компактно и образуют блок концевых выключателей БКВ.
БКВ содержит основание, корпус с микропереключателями и вертикальный вал с кулачками. При повороте вала кулачки микропереключателей, в зависимости от положения вала, нажимают на толкатель микропереключателя и вызывают его срабатывание и, следовательно, останов электродвигателя. Оппозитная группа микропереключателей в это время замкнута, что позволяет осуществить вращение выходного вала в противоположном направлении.
Блок датчиков предназначен для преобразования углового перемещения выходного вала механизма в унифицированный электрический сигнал, либо изменения активного или реактивного сопротивления в зависимости от типа датчика.
МЭО оснащаются одним из видов блока сигнализации положения выходного вала − реостатным БСПР, индуктивным БСПИ, токовым БСПТ с унифицированным токовым сигналом 4-20 мА по ГОСТ 26.011. В условном обозначении механизма ставятся соответственно следующие буквы: «Р», «И», «У».
В МЭО при выборе реостатного датчика угла поворота выходного вала применяются дистанционные указатели угла поворота выходного вала (ДУП), в котором совместно с БСПР организуется мостовая схема, в диагонали которой установлен стрелочный индикатор с органами настройки показаний ДУП 0−100 % при min/max состояниях угла поворота выходного вала МЭО.
Питание ДУП – однофазная сеть переменного тока с номинальным напряжением 220 В. Мощность, потребляемая указателем, не более 5 ВА. Масса ДУП не более 0,6 кг.
− 51 −
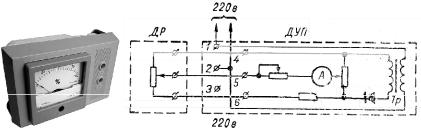
Схема соединения ДУП с реостатным датчиком ДР блока сигнализации положения выходного вала МЭО показана на рис. 4.35.
Рис. 4.35. Внешний вид ДУП и схема электрических соединений МЭО и ДУП: ДР − реостатный датчик БСПР угла поворота выходного вала МЭО
Ручное управление
Ручное перемещение выходного вала механизма осуществляется вращением ручки ручного привода. Полному ходу выходного вала механизма соответствует определенное число оборотов ручного привода.
Оформление заказа на поставку
При оформлении заказа необходимо указать: тип механизма;
номинальный крутящий момент на выходном валу, N m; номинальное время полного хода Тх выходного вала, с; полный ход выходного вала, г; необходимость блока сигнализации положения выходного вала
и его тип; напряжение питания и частоту тока;
климатическое исполнение и категорию размещения. Рекомендуется указывать полное условное обозначение меха-
низма, выбранное из номенклатуры исполнений, указанных в каталогах.
− 52 −

Схемы подключения МЭО
Рис. 4.36. Схема подключений к контактному разъему МЭО S1,S2; S3,S4 – контактные группы концевых выключателей
− 53 −

Рис. 4.37. Схема подключений к контактному разъему МЭО реостатных датчиков БСПР угла поворота выходного вала
Рис. 4.38. Схема подключения МЭО через общепромышленный пускатель ПМЕ к силовой сети и к регулирующему устройству ТМ8
− 54 −
Контрольные вопросы
1.Сформулируйте физическую основу метода гармонической линеаризации.
2.Почему метод гармонического баланса позволяет при анализе САУ ограничиться характеристиками нелинейного элемента по первой гармонике?
3.Проведите вычисление эквивалентной характеристики нелинейного элемента.
4.Что является основой анализа автоколебательного режима на логарифмической плоскости?
5.Каким образом определяется «баланс фаз и амплитуд» при графоаналитическом анализе автоколебательного режима на логарифмической плоскости?
6.Какими способами возможно изменять коэффициент усиления разомкнутой системы?
7.Возможно ли в САУ с 3-позиционным нелинейным элементом отсутствие автоколебаний?
8.Как работает система управления температуры ТЭН в представленной реализации?
9.Какие настроечные параметры регулятора типа ТМ8 используются в данной работе?
10.Что означает термин-характеристика «ТСМ 50М»?
11.Назовите основные элементы, комплектующие промышленный исполнительный механизм постоянной скорости.
12.Каким образом осуществляется импульсное управление средней скоростью «промышленного исполнительного механизма постоянной скорости»?
Список рекомендуемой литературы
1.Филипс Ч., Харбор Р. Системы управления с обратной связью. − М.: Лаборатория базовых знаний, 2001.
2.Дорф Р., Бишоп Р. Современные системы управления. − М.: Лаборатория базовых знаний, ЮНИМЕДИАСТАЙЛ, 2002.
3.Лурье Б.Я., Энтрайт П.Дж. Классические методы автоматиче-
ского управления: Учебное пособие. − СПб.: БХВ-Петербург, 2004.
− 55 −

Всеволод Михайлович Журомский
НЕЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ. МЕТОД ГАРМОНИЧЕСКОГО БАЛАНСА
ИНЖЕНЕРНО-ФИЗИЧЕСКИЕ ОСНОВЫ
Учебное пособие
Редактор Е.К. Коцарева
Оригинал-макет изготовлен С.В. Тялиной
Подписано в печать 15.11.2011. Формат 60×84 1/16 Уч.-изд.л. 6,0. Печ.л. 3,5. Тираж экз. Изд. № 2/37. Заказ №
Национальный исследовательский ядерный университет «МИФИ». 115409, Москва, Каширское ш., 31.
ООО «Полиграфический комплекс «Курчатовский». 144000, Московская область, г. Электросталь, ул. Красная, д. 42.
− 56 −