

Журомский Нелинейные системы автоматического управления 2012
.pdfРис. 4.8. Графоаналитический анализ баланса фаз и амплитуд НСАУ:
1 – ЛАЧХ линейной части НСАУ при Кс = 0,04. Автоколебания отсутствуют; 2 – ЛФЧХ линейной части НСАУ без фактора чистого запаздывания; 3 − ЛФЧХ звена чистого запаздывания при τ = 60 c;
4 – ЛФЧХ линейной части НСАУ; 5 – обратная эквивалентная нормированная логарифмическая характеристика нелинейного элемента; 6 − ЛАЧХ линейной части НСАУ при Kс = 0,1. Автоколебания существуют
Автоколебания не существуют при Kс ≤ 0,04.
3.Определяют по рис. 4.8 необходимое значение коэффициента усиления разомкнутой системы, соответствующее заданным параметрам автоколебательного режима, либо отсутствию автоколебаний.
4.Изменение (как правило − уменьшение) коэффициента пере-
дачи разомкнутой системы Kс возможно:
за счет (увеличения) величины «с» зоны нечувствительности НЭ
(уменьшается Kн), что ухудшает точность автоматического управления и является нежелательным;
− 31 −
изменения (уменьшения) коэффициента передачи ИМ за счет импульсного управления средней скоростью промышленного ИМ (типа МЭО), предусмотренного в блоке «импульсатор» регулятора ТМ8 (см. рис. 4.1).
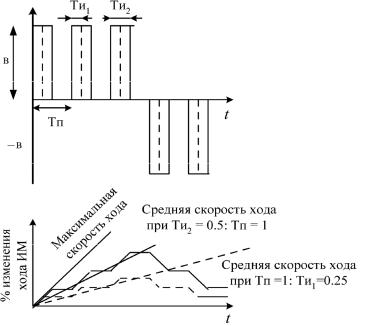
5. Коэффициент передачи ИМ − Kим − средняя скорость движения выходного вала исполнительного механизма при импульсном управлении ИМ настраивается отношением длительности импульса Ти к длительности паузы Тп (рис. 4.9) импульсного выходного сигнала регулятора ТМ8, которые настраиваются перемычками на задней панели регулятора ТМ8 (рис. 4.31−4.32).
Рис. 4.9. Настройка средней скорости хода ИМ импульсным управлением исполнительного механизма
Величина Ти должна быть по возможности малой, чтобы возникающее квантование в диапазоне перемещения выходного вала ИМ, равного 0−180 угл. град. или 0−100 % по показаниям ДУП, не было избыточно грубым:
− 32 −

при ходе ИМ, равным 180 град. и времени хода Тх = 60 с, номинальная скорость вращения выходного вала ИМ равна 3 град./с или
1,6 %/с;
при выборе Ти = 0,5 с угловой квант перемещения ИМ равен
180 град. 0,5 с/60 c = 1,5 град. или 0,8 %. Число квантов – 120;
при выборе Ти = 1 с угловой квант перемещения ИМ равен 3 град. или 1,6 %. Число квантов – 60;
при выборе Ти = 3 с квант перемещения равен 9 град. или 5 %. Число квантов равно 20-ти в диапазоне 0−180 угл. град. или 0−100 % перемещения ИМ.
Грубое квантование «по уровню» ухудшает показатели работы НСАУ и предлагаемый расчет НСАУ делает неадекватным.
Величину Тп также необходимо выбирать возможно малой, так как импульсное управление средней скоростью ИМ соответствует квантованию во времени, когда сигнал управления в системе за время паузы Тп отсутствует.
В инженерных расчетах промышленных САУ при величине Тп много меньшей динамических констант объекта управления отмеченным эффектом квантования по времени пренебрегают.
Исходное размерное значение коэффициента передачи Kим исполнительного механизма определяется следующим образом: при В = 1 (ИМ включен) выходной вал ИМ перемещается в диапазоне 0−180 угл. град. или 0−100 % по показаниям ДУП за «время хода» Тх = 60 с. Следовательно, Kим = 180/60 = 3 угл.град./c или 1,6 %/с по показаниям ДУП.
6. Коэффициент передачи линейной «части» характеристики НЭ, зависящий от конкретных параметров (В = 1, с = 1 °С) 3-по-
зиционного закона управления есть Kн = 4πBc = 3,144 11 =1, 27 .
Следовательно, исходное значение коэффициента передачи Kc линейной части разомкнутой НСАУ
Kс = Kн Kим Kо =1, 27 |
1 |
|
1, 6 |
||
|
|
|
|
||
о |
|
||||
|
|
|
С |
|
|
% |
1, 5 |
|
оC |
|
−1 |
||
|
|
|
|
|
3 c |
. |
|
|
|||||||
|
с |
|
% |
|
|
||
Необходимое значение Kс, при котором автоколебания не существуют, согласно рис. 4.8 составляет 0,04.
− 33 −
Таким образом, необходимо уменьшить среднюю скорость вращения выходного вала исполнительного механизма в 3/0.04 =
=75 раз.
7.Это означает, что в настройке алгоритма схемы ШИМ регулятора время паузы Тп должно быть в 75 раз больше времени импульса Ти (работы ИМ за время Тп).
При выборе Ти следует назначать Ти более 0,5 с, поскольку при меньших значениях Ти электродвигатель промышленного ИМ вследствие инерционности не успевает «раскрутиться» до значений номинальной угловой скорости.
В данном случае назначаем Ти = 0,5с, Тп = 30 с как ближайшие к штатным значениям настроек, предусмотренных в регуляторе ТМ8.
8.Проводится экспериментальное изучение работы системы в режиме стабилизации заданной температуры при отработке изменения «задания» по температуре, при наличии возмущений при неизменном задании по температуре. Возмущающее воздействие создается изменением мощности обдува ТЭН, в том числе прекращением обдува (выключением вентилятора).
Моделирование
Схема модели в среде МАТЛАБ (Simulink) и результаты моделирования показаны на рис. 4.10−4.26.
Совпадение экспериментальных результатов работы физической системы с расчетными и модельными при пользовании представленной инженерной методикой анализа НСАУ обычно не превы-
шает 5−10 %.
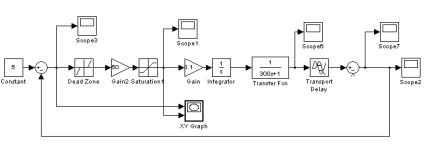
Рис. 4.10. Схема модели НСАУ. Элемент сравнения в правой части рисунка предназначен для ввода возмущающего воздействия (см. рис. 4.19)
− 34 −

Рис. 4.11. Визуализация характеристики НЭ структуры рис. 4.10
на экране «XYGraph2»
Рис. 4.12. Работа НСАУ. Сигнал на выходе НЭ
− 35 −

Рис. 4.13. Работа НСАУ. Фильтрация высших гармоник. Сигнал на выходе интегратора. Задание – 75 единиц
Рис. 4.14. Работа НСАУ. Фильтрация высших гармоник. Сигнал на выходе инерционного звена. «Задание» – 75 единиц
− 36 −

Рис. 4.15. Работа НСАУ. Сигнал на входе НЭ. «Задание» – 75 единиц
Рис. 4.16. Работа НСАУ. Определение параметров автоколебаний при Кс= 0.1. Амплитуда и период автоколебаний: Аавт = 7, Тавт = 900 с. Амплитуда автоколебаний отсчитывается от среднего значения выхода НСАУ, равного 75 единиц
− 37 −
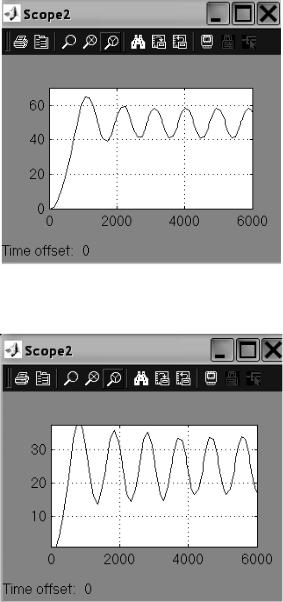
Рис. 4.17. Работа НСАУ. «Задание» – 50 единиц; параметры автоколебаний не изменились
Рис. 4.18. Работа НСАУ. Величина «задание» – 25 единиц
− 38 −
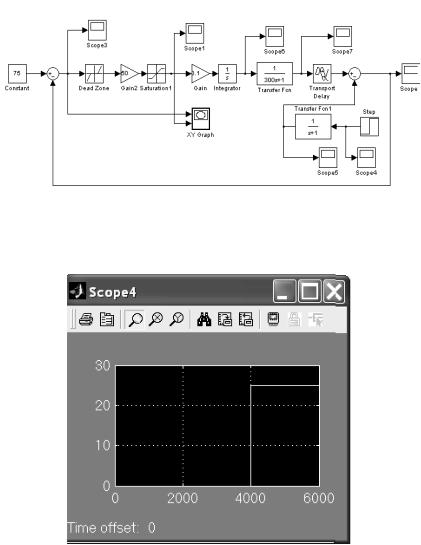
Рис. 4.19. Модель НСАУ для изучения процессов отработки возмущающих воздействий. Возмущающее воздействие формируется блоком «Step», визуализируется осциллографом «Scop4»
Рис. 4.20. Возмущающее воздействие, формируемое блоком «Step», задается в момент времени 4000 с, когда переходные процессы в НСАУ практически установились. Величина возмущающего воздействия составляет 25 единиц
− 39 −

Рис. 4.21. Работа НСАУ. Отработка возмущающего воздействия при постоянной времени передаточной функции по каналу возмущения «Transfer Fcn1» Тф = 100 с. «Задание» − 75 единиц. Возмущающее воздействие вида рис. 4.20
Рис. 4.22. Работа НСАУ. Отработка возмущающего воздействия при постоянной времени передаточной функции по каналу возмущения «Transfer Fcn1» Тф = 1 с. «Задание» − 75 единиц. Возмущающее воздействие вида рис. 4.20
− 40 −