

Журомский Нелинейные системы автоматического управления 2012
.pdfРис. 4.23. Работа НСАУ. Кс = 0,02. Выход на ehjdtym «задания» − 75 единиц. Время регулирования − 5000 с. Автоколебания на грани устойчивости
Рис. 4.24. Работа НСАУ. Кс = 0,01. Выход на уровень «задания» − 75 единиц. Время регулирования − 7000 с. Автоколебания отсутствуют
− 41 −

Рис. 4.25. Работа НСАУ. Кс = 0.01. Отработка возмущающего воздействия при постоянной времени передаточной функции по каналу возмущения «Transfer Fcn1» Тф = 1 с. Возмущающее воздействие 25 единиц инициировано в момент времени 10000 с. «Задание» − 75 единиц
Рис. 4.26. Работа НСАУ. Кс = 0,02. Отработка возмущающего воздействия при постоянной времени передаточной функции по каналу возмущения «Transfer Fcn1» Тф = 1 с. Возмущающее воздействие 25 единиц инициировано в момент времени 10000 с. «Задание» – 75 единиц
− 42 −

Аппаратурное решение НСАУ
Экспериментальный лабораторный макет НСАУ представлен на рис. 4.27. Стандартный самописец измеряемой температуры объекта управления не показан.
Рис. 4.27. Экспериментальный лабораторный макет НСАУ. Видны исполнительный механизм постоянной скорости типа МЭО (справа внизу) ЛАРТ-2 (в центре), регулятор ТМ8 и ДУП (слева), объект управления с вентиляторной группой (вверху). Отдельно выделенный объект управления показан на рис. 4.29
Рис. 4.28. Объект управления НСАУ. Видны нагреваемый сплошной металлических диск и нагревательный элемент с вентилятором обдува. Термосопротивление ТСП 50М (слева), измеряющее температуру диска, расположено в сверлении по радиусу диска
− 43 −
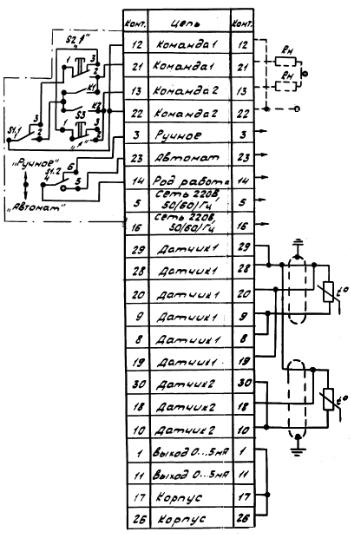
Рис. 4.29. Схема внешних соединений регулятора ТМ8. Фрагмент заводского описания изделия. Для ТМ8 подсоединяется только верхний термодатчик. Rн соответствуют статорным обмоткам исполнительного механизма МЭО или обмоткам электромагнитных реле – повторителей. При установке внешнего показывающего прибора перемычку 1 и 17 не ставить
− 44 −
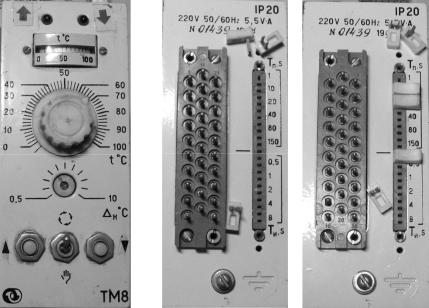
Рис. 4.30. Передняя па- |
Рис. 4.31. |
Тыльная |
Рис. 4.32. |
Настройка |
||||
нель регулятора. Свер- |
панель |
регулятора |
регулятора: Ти = 0,5 с, |
|||||
ху вниз: индикатор на- |
ТМ8. Справа |
видна |
Тп = 30 с. Поставлены |
|||||
правления |
вращения |
панель установки на- |
перемычки |
позиций |
||||
выходного |
вала |
ИМ; |
строечных |
парамет- |
Тп – «10с» + «20с». На |
|||
местный |
индикатор |
ров регулятора – дли- |
планке позиций |
Ти |
||||
текущего значения ре- |
тельности |
паузы Тп, |
поставлена |
перемыч- |
||||
гулируемой |
температу- |
длительности |
им- |
ка настройки «Ти |
= |
|||
ры; задатчик темпера- |
пульса Ти. Настройки |
= 0,5 с» |
|
|
||||
туры; установка |
зоны |
регулятора |
составля- |
|
|
|
||
нечувствительности; |
ются суммой закоро- |
|
|
|
||||
переключатель |
«руч- |
ченных перемычкой |
|
|
|
|||
ное/автоматическое» |
значений Ти или Тп |
|
|
|
||||
управление, |
кнопки |
|
|
|
|
|
|
|
ручного управления |
|
|
|
|
|
|
||
− 45 −

Механизмы исполнительные постоянной скорости однооборотные МЭО
Рис. 4.33. Внешний вид МЭО
− 46 −

Рис. 4.34. Габаритные и установочные размеры МЭО:
1 − редуктор; 2 − электродвигатель; 3 − блок сигнализации положения; 4 − панель; 5 − штепсельный разъем; 6 − болт заземления; 7 − рычаг; 8 − ручной привод
Извлечение из заводского описания «Механизмы исполнительные электрические однооборотные – МЭО»
Назначение
Механизмы исполнительные электрические однооборотные постоянной скорости МЭО и МЭОФ (в дальнейшем − механизмы) предназначены для перемещения регулирующих органов в системах автоматического регулирования технологическими процессами в соответствии с командными сигналами автоматических регулирующих и управляющих устройств.
Принцип работы механизмов заключается в преобразовании электрического сигнала, поступающего от регулирующего или управляющего устройства во вращательное перемещение выходного вала.
− 47 −
В зависимости от способа сочленения с арматурой механизмы подразделяются на две группы:
механизмы МЭОФ встроенные, устанавливаемые непосредственно на арматуру и соединяемые с ней посредством монтажных частей;
механизмы МЭО выносные, устанавливаемые на специальных площадках вблизи арматуры и связанные с ней посредством системы тяг и рычагов.
Основные функции
Таковыми являются:
автоматическое или дистанционное перемещение рабочего органа;
автоматический и дистанционный останов рабочего органа арматуры в любом промежуточном положении;
позиционирование рабочего органа (в том числе трубопроводной арматуры-вентиля) в любом промежуточном положении;
ручное перемещение рабочего органа; формирование информационного сигнала о конечных и проме-
жуточных положениях рабочего органа арматуры и динамике его перемещения.
Основные параметры
Основными параметрами, определяющими типоразмер механизма, являются:
номинальный крутящий момент на выходном валу в N m (ньютон × метр);
номинальное значение полного хода выходного органа в оборотах (ϕ, град.);
номинальное значение времени полного хода Тх выходного вала в секундах.
Необходимый крутящий момент обеспечивается подбором мощности электродвигателя механизма, передаточного отношения редуктора и его коэффициента полезного действия. Величина крутящего момента определяет габаритные размеры и массу механизма.
Механизмы обеспечивают фиксацию положения выходного вала при отсутствии напряжения питания.
− 48 −
Механизмы являются восстанавливаемыми, ремонтируемыми, однофункциональными изделиями.
Пусковой крутящий момент механизмов при номинальном напряжении питания превышает номинальный крутящий момент не менее чем в 1,7 раза.
Динамические характеристики механизмов
Выбег выходного вала:
1 % полного хода выходного вала − для механизмов с временем полного хода не более 15 с;
0,5 % полного хода выходного вала − для механизмов с временем полного хода 20 с и более;
0,25 % полного хода выходного вала − для механизмов с временем полного хода 50 с и более.
Электрическое питание механизмов: однофазный ток напряжением 220 V частотой 50 Hz.
Отличительные особенности механизмов
Высокие динамические характеристики. Малый выбег выходного вала.
Малый люфт выходного вала.
Возможность установки различных блоков сигнализации положения выходного вала (токовый, индуктивный или реостатный), которые позволяют формировать дискретную информацию о крайних и промежуточных положениях рабочего органа арматуры и аналоговую (цифровую) информацию о динамике его перемещения.
Наличие механических ограничителей полного хода выходного органа позволяет предохранить арматуру от механического повреждения при отказе концевых микропереключателей.
Асинхронные двигатели малой мощности обеспечивают работу механизмов при температуре минус 40 °С без подогрева механизмов.
Малые пусковые токи двигателей обеспечивают работу механизмов с большой частотой включений в час и допускают работу механизмов на жесткий упор при продолжительности включений до 25 % (например, при отказе концевого выключателя).
Рабочее положение механизмов в пространстве − любое.
− 49 −
Степень защиты оболочки механизмов не ниже IP54 по ГОСТ
14254.
Механизмы соответствуют требованиям ГОСТ 7192-89 «Механизмы исполнительные электрические постоянной скорости ГСП».
Устройство
Механизмы состоят из следующих основных узлов: электродвигатель, редуктор,
блок сигнализации положения, привод ручной.
Двигатель
В маломощных МЭО используются однофазные конденсаторные электродвигатели переменного тока 220 В.
Двигатели обеспечивают повторно-кратковременный режим работы механизмов с частыми пусками S4 по ГОСТ 183.
Продолжительность включений (далее − ПВ) до 25 % и номинальной частотой включения до 630 в час при нагрузке на выходном валу в пределах от номинальной противодействующей до 0,5 номинального значения сопутствующей.
При реверсировании интервал времени между выключением и включением на обратное направление должен быть не менее 50 мс.
Управление работой механизмов может быть как контактным при помощи пускателей типа ПМЛ или промежуточных электромагнитных реле, так и бесконтактным с реверсивными пускателями типа ПБР или усилителями тиристорными трехпозиционными.
Редуктор является основным узлом, к которому присоединяются все остальные узлы.
Понижение частоты вращения и увеличение крутящего момента, создаваемых двигателем, осуществляется посредством многоступенчатых цилиндрических зубчатых или комбинированных червячно-зубчатых передач. Валы вращаются на шарикоподшипниках. Зубчатые передачи и шарикоподшипники смазываются густой смазкой, что обеспечивает установку механизма в любом положении в пространстве.
− 50 −